
一种玻璃幕墙清洗机器人.pdf

Ja****23

1/10

2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种玻璃幕墙清洗机器人.pdf
本发明公开一种玻璃幕墙清洗机器人,本发明包括8个伸缩支承臂部件、1个伸缩滚刷清洗部件、移动式支架导轨部件和连接部件,本发明采用了一种工业用的非接触式负压吸盘,该种吸盘的吸附特点是不与玻璃壁面接触,能够与玻璃壁面保持最大的平行度,从而保证吸盘能够产生最大的吸附力,同时也能保证为清洗机器人提供更好的稳定性,本发明通过双滚刷的方式进行壁面清洗,本发明机器人利用支承臂的伸缩和旋转,互相协调伸缩和旋转角度,使该清洗机器人更灵活、更稳定的吸附在玻璃壁面,本发明玻璃幕墙清洗机器人能够适用竖直平面、斜平面、圆弧面等各种玻
一种玻璃幕墙清洗机器人.pdf
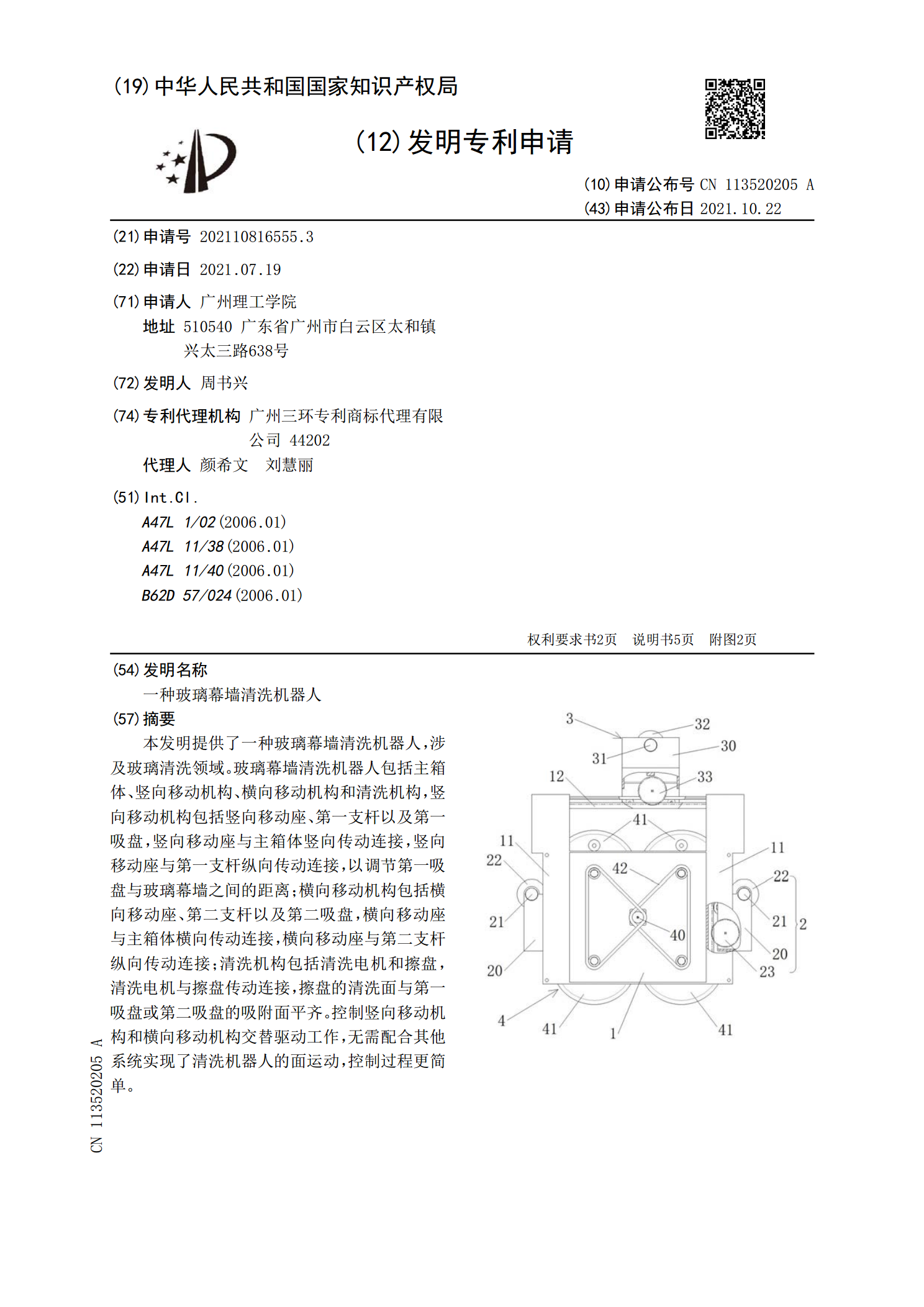
本发明提供了一种玻璃幕墙清洗机器人,涉及玻璃清洗领域。玻璃幕墙清洗机器人包括主箱体、竖向移动机构、横向移动机构和清洗机构,竖向移动机构包括竖向移动座、第一支杆以及第一吸盘,竖向移动座与主箱体竖向传动连接,竖向移动座与第一支杆纵向传动连接,以调节第一吸盘与玻璃幕墙之间的距离;横向移动机构包括横向移动座、第二支杆以及第二吸盘,横向移动座与主箱体横向传动连接,横向移动座与第二支杆纵向传动连接;清洗机构包括清洗电机和擦盘,清洗电机与擦盘传动连接,擦盘的清洗面与第一吸盘或第二吸盘的吸附面平齐。控制竖向移动机构和横向

一种玻璃幕墙清洗机器人.pdf
本发明涉及一种玻璃幕墙清洗机器人,包括主体、第一主刷、第二主刷、第一清洗辊、第二清洗辊、导水管,所述第一主刷、第二主刷均由电机驱动,所述第一主刷、第二主刷外侧均固定连接有刷毛卷,所述第一清洗辊、第二清洗辊外侧均固定连接有清理板,所述导水管顶部连接楼顶水源,在重力作用下水从导水管底部排出,在第一主刷、第二主刷转动运行过程中,通过导水管排出的清水不断冲刷清洗辊、与主刷,可以有效实现玻璃清洗过程中对刷毛卷的及时清洗,确保刷毛卷在清洁状态下对幕墙进行清洗,减少了污水在玻璃幕墙表面的残留,提高了擦洗清理效果,可以很

一种用于玻璃幕墙清洗的机器人.pdf
本发明提供一种用于玻璃幕墙清洗的机器人,包括机体主壳体及内部控制结构,所述机体主壳体结构包括吸盘、履带、轮子集成为一体,所述履带内侧有凸起,用于与轮子连接,传递动力,通过轮子带动行走,通过内部控制结构带动清扫头运动清扫,刮板为倾斜放置便于将污水回收储存,实现了大面积的清洁幕墙,有效提高清洁效率。

一种玻璃幕墙清洗机器人系统.pdf
本发明公开了一种玻璃幕墙清洗机器人系统,属于特种环境自动化保洁技术领域,包括机器人本体、移动平台、提升装置,所述提升装置安装有直流电机、绕线棒、绕线轮、软绳、定滑轮和轴承座;所述机器人本体包括支撑底盘、清洗装置、吸附装置、吸尘装置及相机云台,所述支撑底盘通过连接件固连着所述清洗装置及所述吸附装置,所述吸尘装置固连着控制电路、供电稳压、传感测量及结构附件;所述移动平台底架上装有两个前进轮、两个万向轮及电池、电机和控制模块,所述底架四角处设有四根角钢,四角钢上端水平固连着四根所述角钢,形成所述提升装置的底部平