
一种非曳引式斜行电梯及其控制方法.pdf

Th****s3

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种非曳引式斜行电梯及其控制方法.pdf
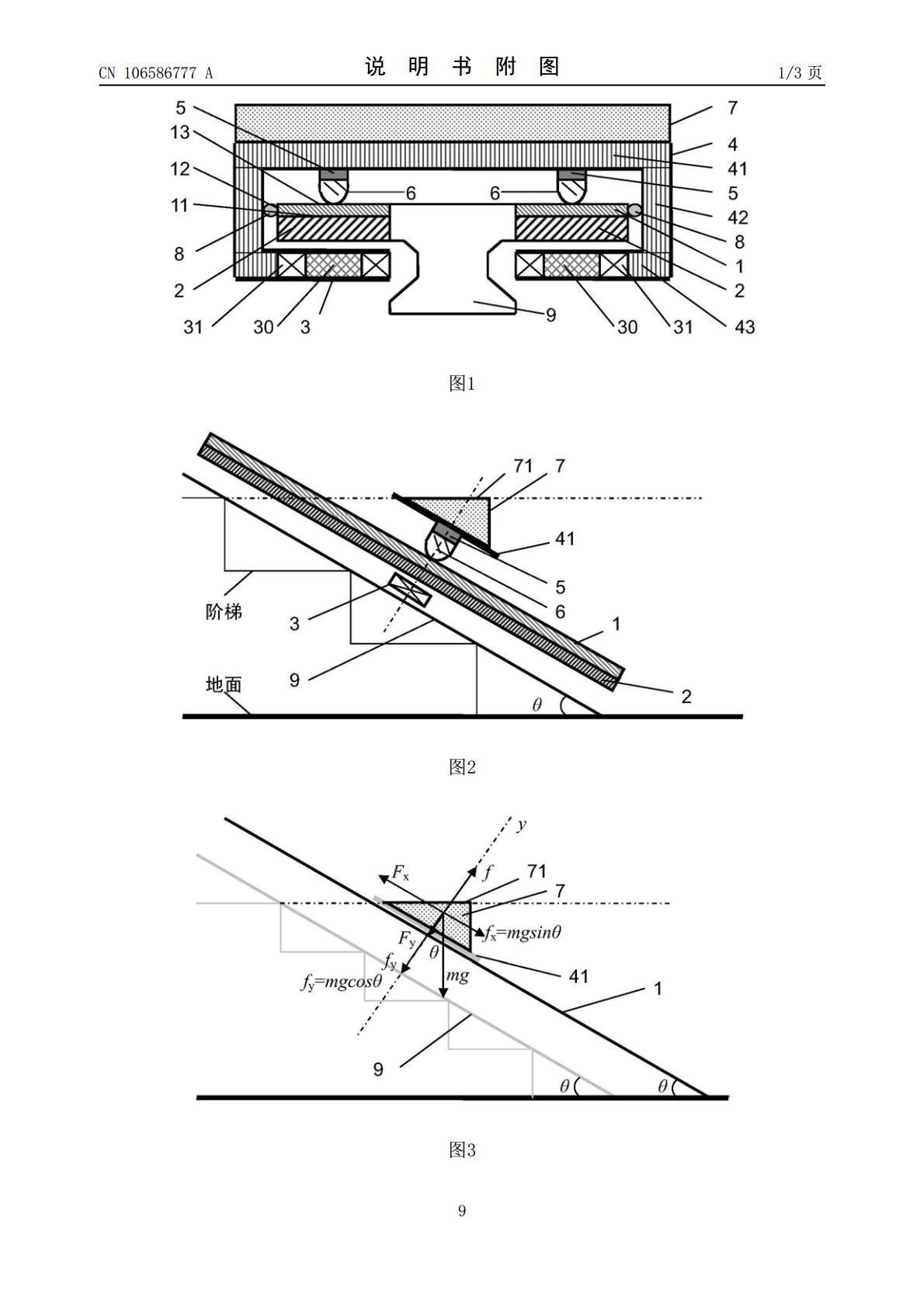
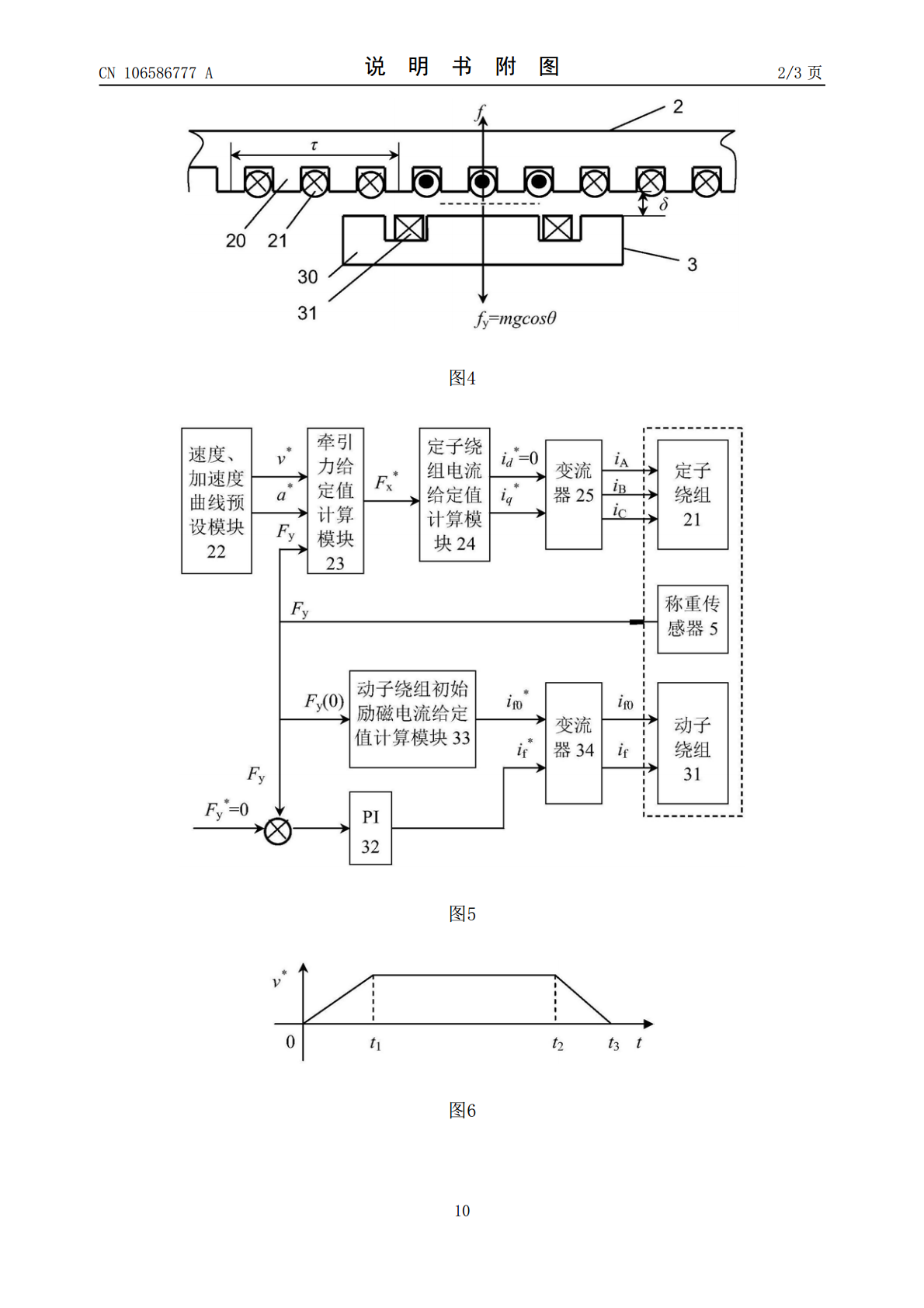
本发明涉及一种非曳引式斜行电梯及其控制方法,该斜行电梯包括:斜行轨道、支撑系统、驱动系统、控制系统、称重传感器、踏板、导向器、斜行支墩。所述驱动系统包括两对相同的定子和动子,定子沿所述斜行轨道连续敷设并与之固定;动子位于定子下方,与支撑架固定;控制系统通过垂直于斜行轨道方向上的合力给定值与称重传感器测得的实际值之差经PI调节器输出的动子绕组励磁电流给定值来控制动子绕组励磁电流,实现了合力的闭环控制;再通过给定速度、加速度曲线和实际测得的载荷,得到牵引力的给定值,以此控制定子绕组输入电流,最终实现了电梯速度
无对重曳引式斜行电梯.pdf
一种无对重曳引式斜行电梯,属于电梯技术领域。包括一对导轨,沿着作为导轨载体的坡面敷设;电梯轿厢,通过其底部的导靴与一对导轨构成滚动副;机架,设在坡面顶部平台上,其上设上、下滑轮;曳引机、涨紧重和返绳轮,当曳引机设在机架上时,涨紧重连接在曳引机的下部或在与曳引机分离的状态下由轿厢牵引绳挽及,返绳轮设在坡面底部,当曳引机设在坡面底部时,则撤去返绳轮且由曳引轮兼返绳轮,轿厢牵引绳的两端与电梯轿厢的下部连接、中部依次挽及上滑轮、曳引轮、下滑轮和返绳轮或者依次挽及上滑轮、涨紧重、下滑轮和曳引轮或者依次挽及曳引轮、上
一种双斜行曳引电梯.pdf
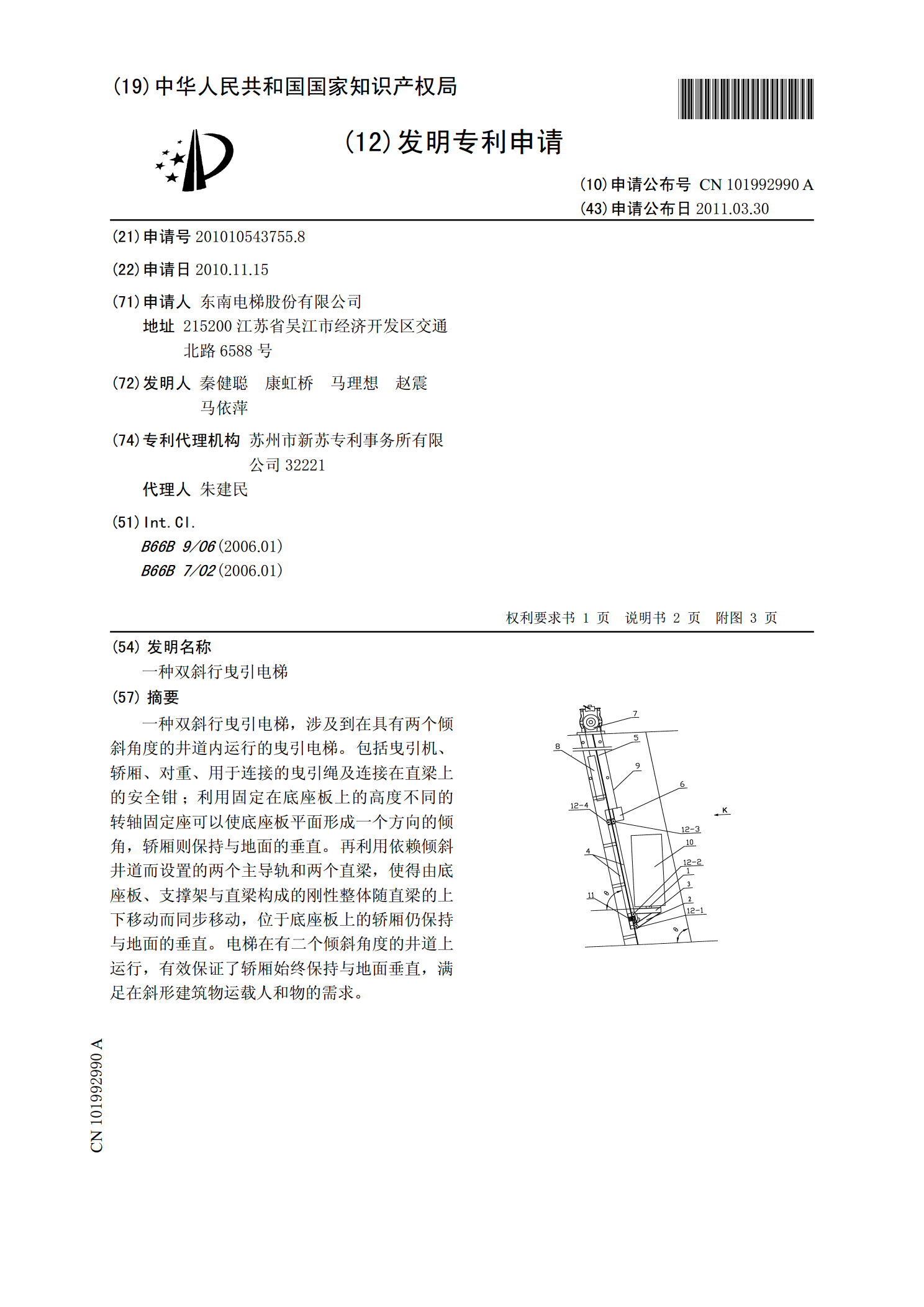
一种双斜行曳引电梯,涉及到在具有两个倾斜角度的井道内运行的曳引电梯。包括曳引机、轿厢、对重、用于连接的曳引绳及连接在直梁上的安全钳;利用固定在底座板上的高度不同的转轴固定座可以使底座板平面形成一个方向的倾角,轿厢则保持与地面的垂直。再利用依赖倾斜井道而设置的两个主导轨和两个直梁,使得由底座板、支撑架与直梁构成的刚性整体随直梁的上下移动而同步移动,位于底座板上的轿厢仍保持与地面的垂直。电梯在有二个倾斜角度的井道上运行,有效保证了轿厢始终保持与地面垂直,满足在斜形建筑物运载人和物的需求。
电梯曳引系统及其控制方法.pdf
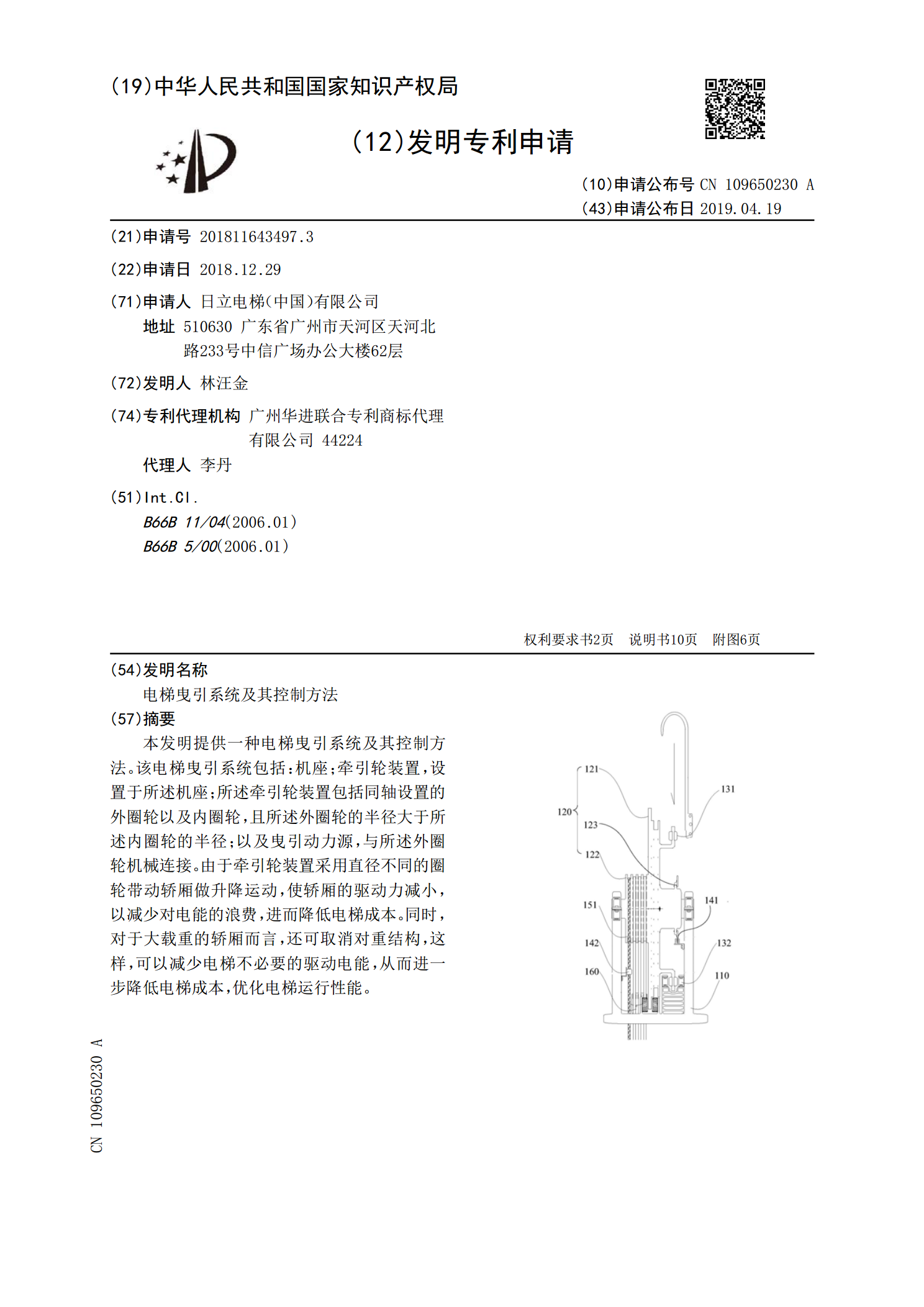
本发明提供一种电梯曳引系统及其控制方法。该电梯曳引系统包括:机座;牵引轮装置,设置于所述机座;所述牵引轮装置包括同轴设置的外圈轮以及内圈轮,且所述外圈轮的半径大于所述内圈轮的半径;以及曳引动力源,与所述外圈轮机械连接。由于牵引轮装置采用直径不同的圈轮带动轿厢做升降运动,使轿厢的驱动力减小,以减少对电能的浪费,进而降低电梯成本。同时,对于大载重的轿厢而言,还可取消对重结构,这样,可以减少电梯不必要的驱动电能,从而进一步降低电梯成本,优化电梯运行性能。

一种安全可靠的曳引式乘客电梯及其安全控制方法.pdf
本发明公开了一种安全可靠的曳引式乘客电梯及其安全控制方法,电梯包括井道和设在井道中的轿厢,所述井道内上部设有曳引机,曳引机上设有曳引轮,井道内下部设有导向轮,还包括钢带和张紧安全结构,所述轿厢底部设有轿底导向轮,所述钢带下端固定在井道下部,钢带依次穿过轿底导向轮上面、导向轮下面、曳引轮上面、轿底导向轮下面,钢带上端固定在井道上部;所述轿厢上设有速度传感器;所述张紧安全结构包括伸缩顶杆和用于张紧钢带的张紧轮,所述伸缩顶杆一端固定在井道上,张紧轮通过转轴设在伸缩顶杆另一端;所述导向轮两侧设有可夹紧制动的制动盘