
电梯曳引系统及其控制方法.pdf

高格****gu

1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
电梯曳引系统及其控制方法.pdf
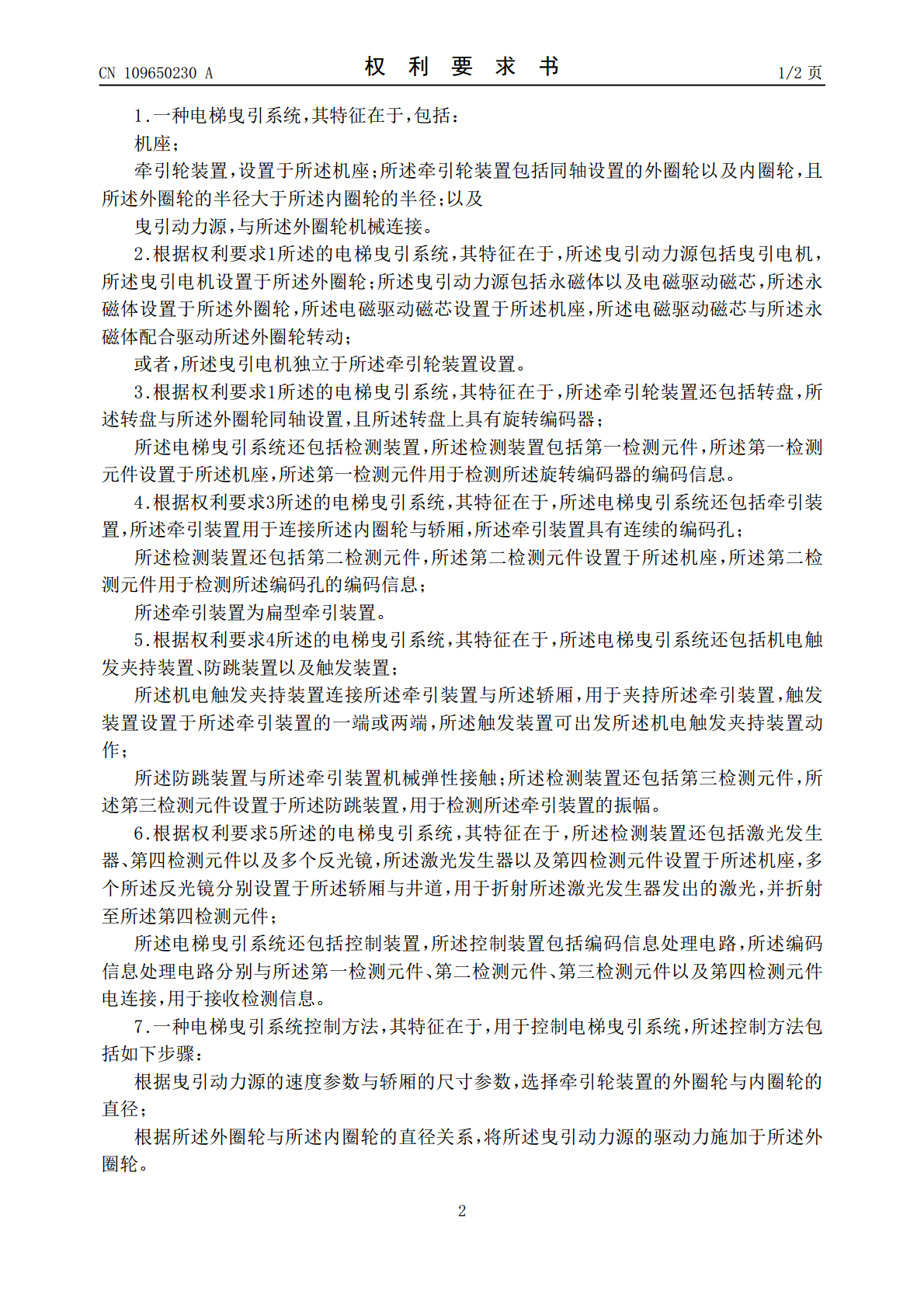
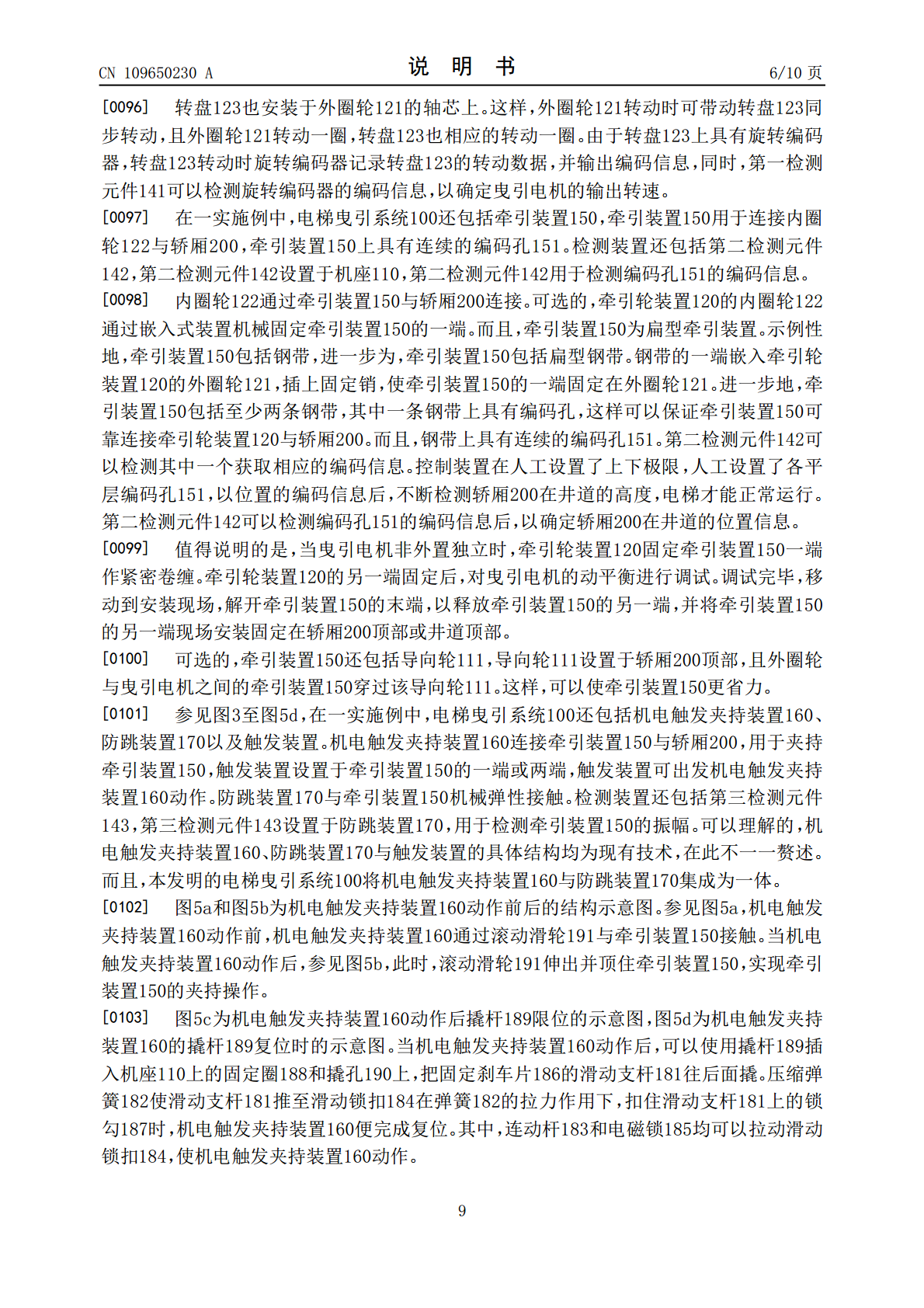
本发明提供一种电梯曳引系统及其控制方法。该电梯曳引系统包括:机座;牵引轮装置,设置于所述机座;所述牵引轮装置包括同轴设置的外圈轮以及内圈轮,且所述外圈轮的半径大于所述内圈轮的半径;以及曳引动力源,与所述外圈轮机械连接。由于牵引轮装置采用直径不同的圈轮带动轿厢做升降运动,使轿厢的驱动力减小,以减少对电能的浪费,进而降低电梯成本。同时,对于大载重的轿厢而言,还可取消对重结构,这样,可以减少电梯不必要的驱动电能,从而进一步降低电梯成本,优化电梯运行性能。

一种双电机电梯曳引系统及其控制方法.pdf
本发明涉及一种双电机电梯曳引系统,包括设置在井道顶部和底部两台曳引机、上曳引轮、下曳引轮、曳引绳、轿厢、对重、导向轮A、反绳轮A、反绳轮B、轿厢绳头板以及用于检测电梯运行情况的检测控制系统,两台曳引机通过曳引绳、导向轮A连接对重,对重的另一端与下曳引轮相连,对重位于轿厢的后方,轿厢上方的一端固定在轿厢绳头板上,通过反绳轮A和反绳轮B连接上曳引轮,轿厢的下端连接下曳引轮,整体构成环形结构。本发明的双电机牵引结构提高了电梯运行的可靠性。

电梯曳引系统.ppt
禄劝职业高级中学张富文曳引电梯结构示意图整台电梯按不同的功能可分为八个系统曳引系统电梯曳引机曳引系统和曳引机的组成曳引系统组成:曳引机、曳引绳、导向轮、反绳轮等。曳引机作用:是电梯轿厢升降的主拖动机械。曳引钢丝绳的两端分别连接轿厢和对重(或者两端固定在机房上),依靠钢丝绳与曳引轮绳槽之间的摩擦力来驱动轿厢升降。导向轮的作用:分开轿厢和对重的间距,采用复绕型时还可增加曳引能力。导向轮安装在曳引机架上或承重梁上。电梯曳引机分类:齿轮曳引机-用于低、快速电梯(<2.0m/s),有减速箱、常用蜗轮蜗杆传动、传动比
电梯系统的曳引带及其带轮和采用该曳引带及带轮的电梯.pdf
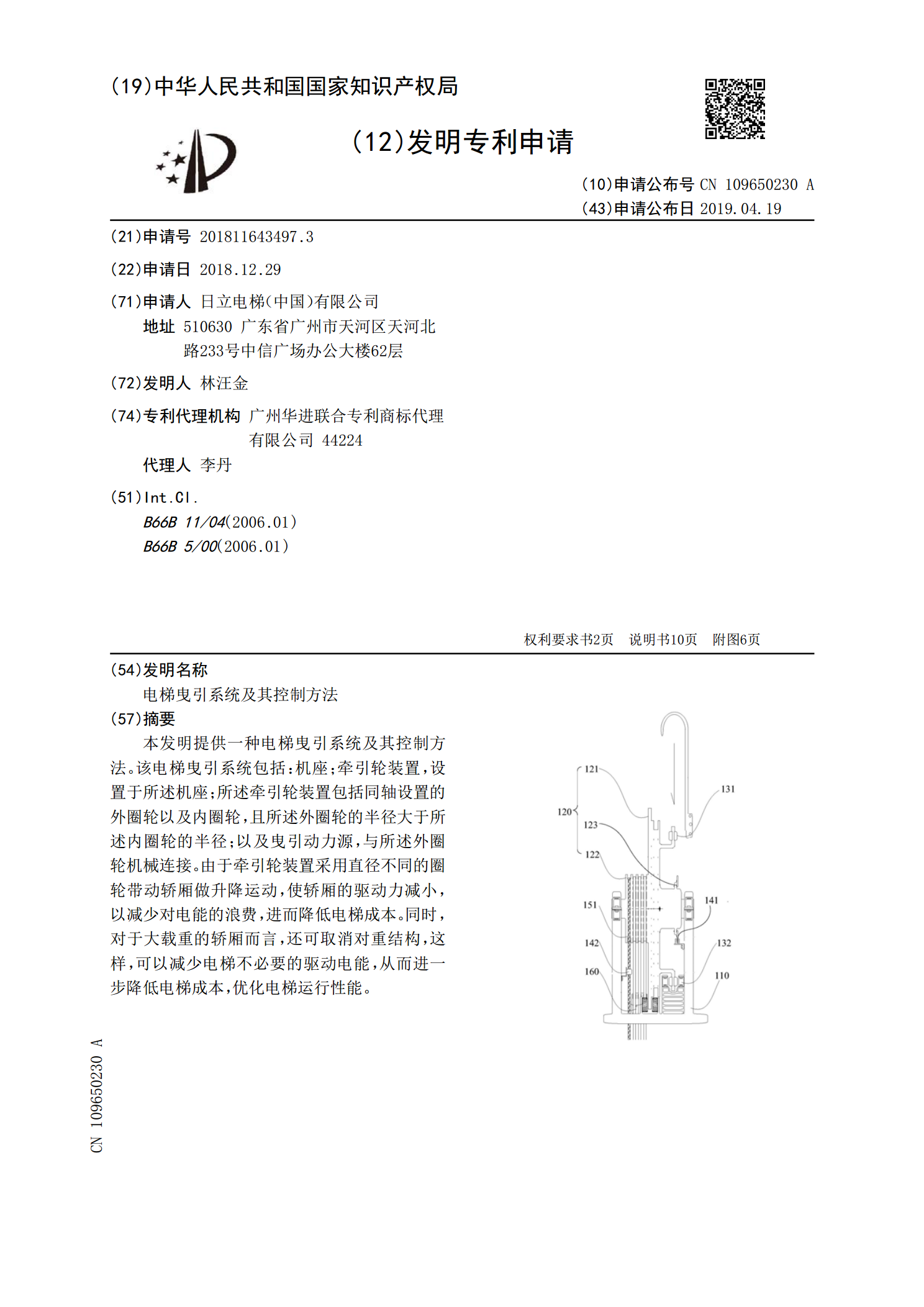
本发明提供一种电梯系统的曳引带及其带轮和采用该曳引带及带轮的电梯。所述电梯系统的曳引带包括:沿着整个曳引带长度延伸的承载单元;沿着整个曳引带长度平行于承载单元延伸的预警单元,其弯曲疲劳寿命低于承载单元的弯曲疲劳寿命;和包裹在承载单元和预警单元之外的包覆层,其中所述曳引带呈厚度均匀的带状,且在宽度方向上具有至少一个连续起伏的轮廓,从而在与曳引轮配合的A侧和与导向轮配合的B侧上形成凹部和凸部。所述带轮包括由曳引轮和导向轮,所述曳引轮的表面具有两种不同的摩擦系数。通过上述连续起伏的轮廓的配合,防止了曳引带通过轮
新型电梯曳引系统.pdf
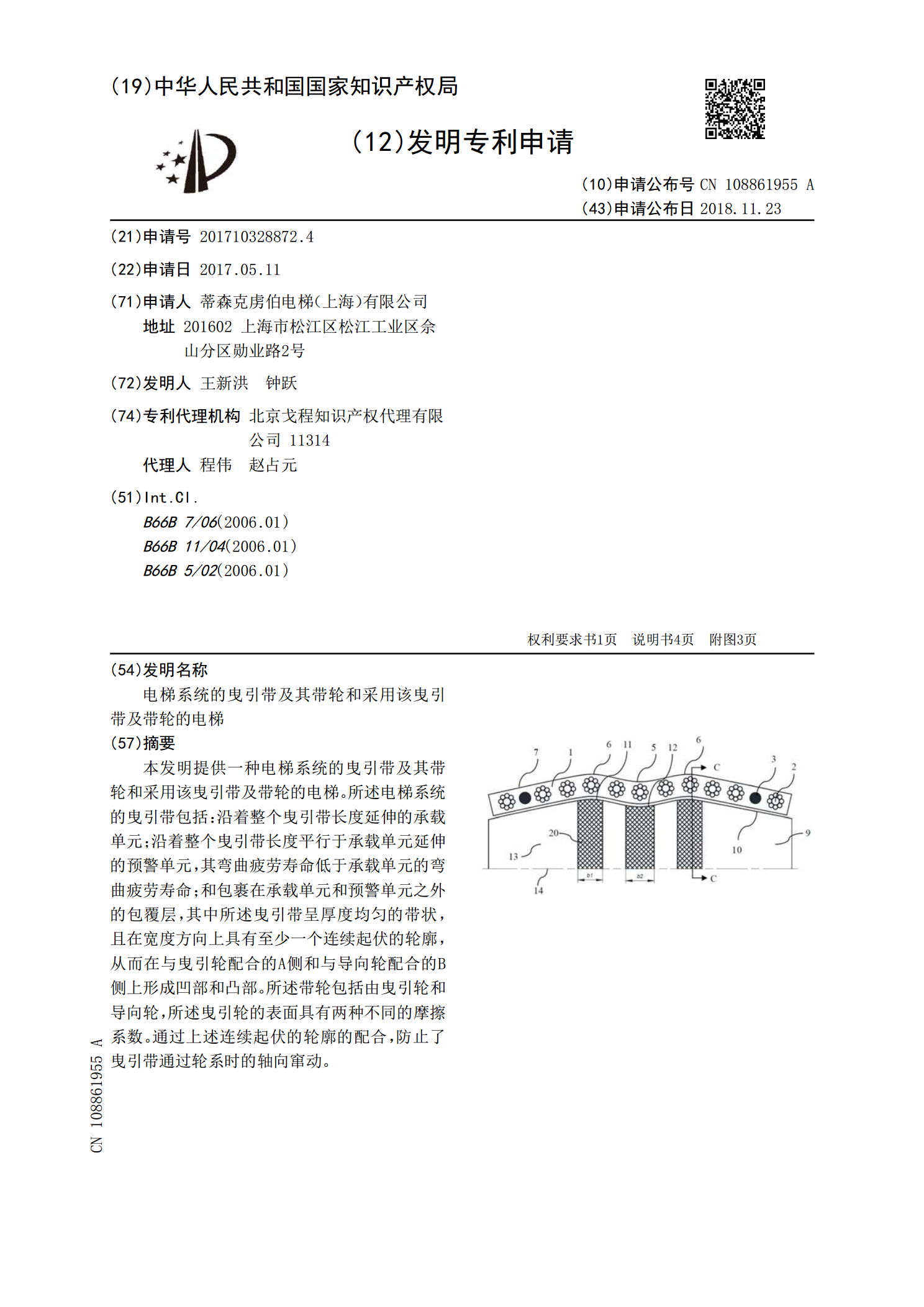
本发明公开了新型电梯曳引系统,涉及电梯领域,包括曳引轮和绕设在曳引轮上的曳引绳或曳引带,还包括设置在曳引绳或曳引带上方的至少一个压力加载组件,压力加载组件包括一个圆弧形支撑架和一个安装在支撑架上的可调压力板组件,可调压力板组件包括一个圆弧形压板、多个安装杆和多个压缩的弹性元件,多个安装杆的下端与压板的上表面固定连接,多个安装杆的上端安装在支撑架上,弹性元件的下端抵接在压板的上表面上,弹性元件的上端抵接在支撑架上,压板的下表面与曳引绳或曳引带相贴并加载指向曳引轮轴心的压力,多个安装杆的上端可沿支撑架的径向方