
多旋翼无人机的姿态与导航信息融合算法研究.doc

是你****韵呀


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多旋翼无人机的姿态与导航信息融合算法研究.doc
多旋翼无人机的姿态与导航信息融合算法研究多旋翼无人机已被广泛应用于军事与民用领域。导航系统是多旋翼无人机的重要组成部分,是其实现安全与稳定飞行的基础。采用INS/GPS组合导航系统可实现高精度导航,该组合导航系统具有优势互补、导航机构冗余的特点,其实质是一个多传感器导航信息优化处理系统。无人机的主要导航参数就是依靠多传感器信息融合获得的,因此信息融合技术是组合导航系统的关键技术,目前已成为国内外学者研究的热点问题。本文以课题组自行研制的全新结构多旋翼小型无人机为研究平台,展开对机载多传感器组合导航系统信息

多旋翼无人机的姿态与导航信息融合算法研究.doc
多旋翼无人机的姿态与导航信息融合算法研究多旋翼无人机已被广泛应用于军事与民用领域。导航系统是多旋翼无人机的重要组成部分,是其实现安全与稳定飞行的基础。采用INS/GPS组合导航系统可实现高精度导航,该组合导航系统具有优势互补、导航机构冗余的特点,其实质是一个多传感器导航信息优化处理系统。无人机的主要导航参数就是依靠多传感器信息融合获得的,因此信息融合技术是组合导航系统的关键技术,目前已成为国内外学者研究的热点问题。本文以课题组自行研制的全新结构多旋翼小型无人机为研究平台,展开对机载多传感器组合导航系统信息

多旋翼无人机的姿态优化.docx
多旋翼无人机的姿态优化标题:多旋翼无人机姿态优化引言:多旋翼无人机作为一种具有广泛应用前景的无人飞行器,其姿态控制是保证飞行器稳定飞行和完成任务的关键要素之一。在传统的无人机姿态控制中,通常采用PID控制器进行控制,但这种控制方法难以满足其高机动性、对外界扰动的鲁棒性等要求。因此,姿态优化成为了当前无人机研究的热点之一,本论文旨在探讨多旋翼无人机姿态优化的方法与实现。一、多旋翼无人机姿态概述多旋翼无人机是一种以多个装有螺旋桨的电动无人机组成的飞行器。在三维空间中,多旋翼无人机具有六个自由度,分别为三个旋转

多旋翼无人机姿态解算的仿真计算研究.docx
多旋翼无人机姿态解算的仿真计算研究摘要本文针对多旋翼无人机的姿态解算问题展开了仿真计算研究。首先介绍了多旋翼无人机的结构和基本的姿态解算方法。然后,针对无人机在实际应用中可能遇到的干扰和噪声,提出了一种基于卡尔曼滤波算法的姿态解算方法。最后,利用MATLAB中的Simulink工具建立了相应的仿真模型,通过对不同情况下的仿真计算进行分析,验证了所提出的姿态解算方法的有效性。关键词:多旋翼无人机;姿态解算;卡尔曼滤波;仿真模型AbstractThispaperstudiestheattitudecalcul
一种多传感融合的四旋翼无人机姿态估计方法.pdf
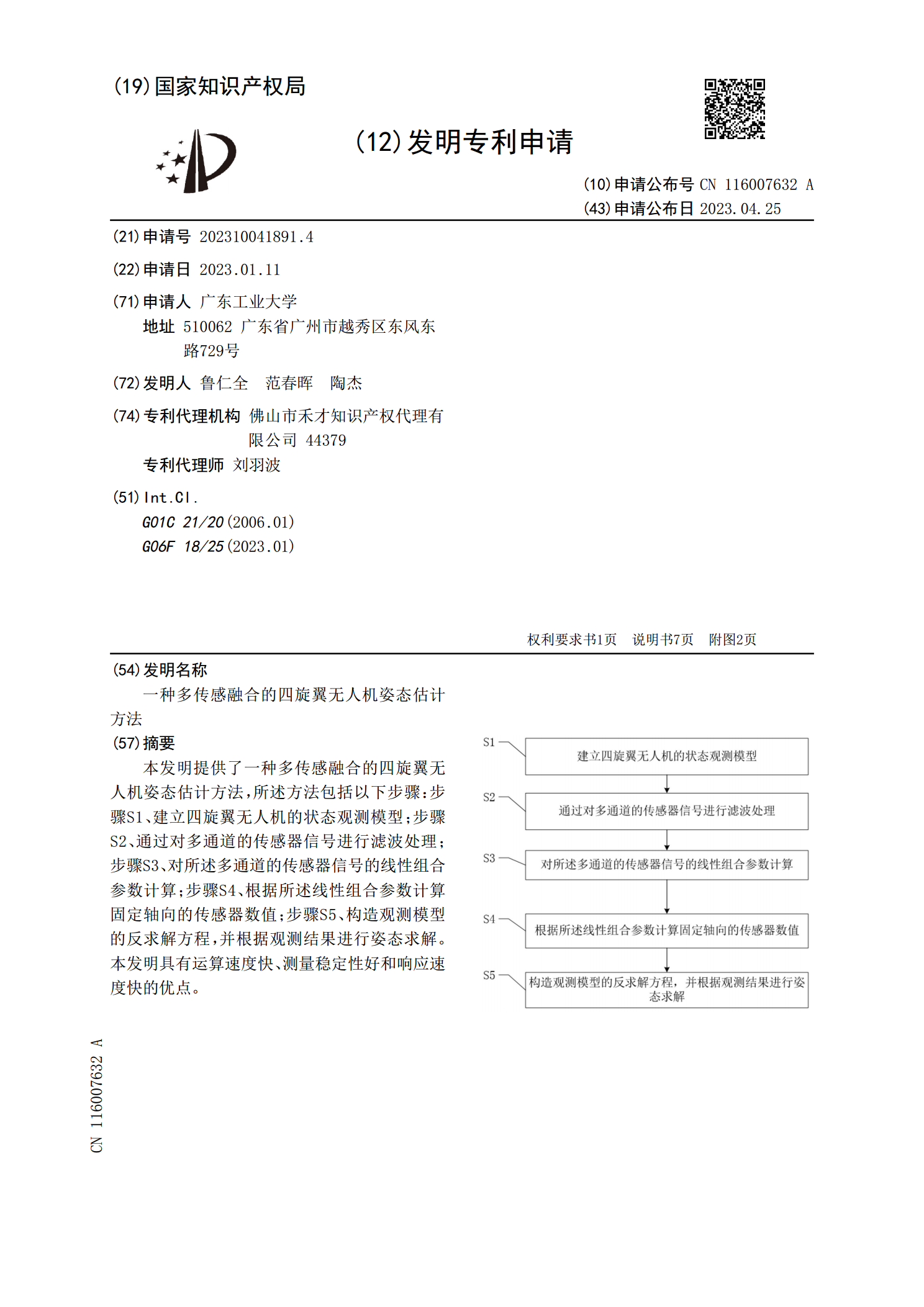
本发明提供了一种多传感融合的四旋翼无人机姿态估计方法,所述方法包括以下步骤:步骤S1、建立四旋翼无人机的状态观测模型;步骤S2、通过对多通道的传感器信号进行滤波处理;步骤S3、对所述多通道的传感器信号的线性组合参数计算;步骤S4、根据所述线性组合参数计算固定轴向的传感器数值;步骤S5、构造观测模型的反求解方程,并根据观测结果进行姿态求解。本发明具有运算速度快、测量稳定性好和响应速度快的优点。