
一种基于超短基线水声定位系统的声线修正方法.pdf

波峻****99


1/10
2/10

3/10

4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于超短基线水声定位系统的声线修正方法.pdf
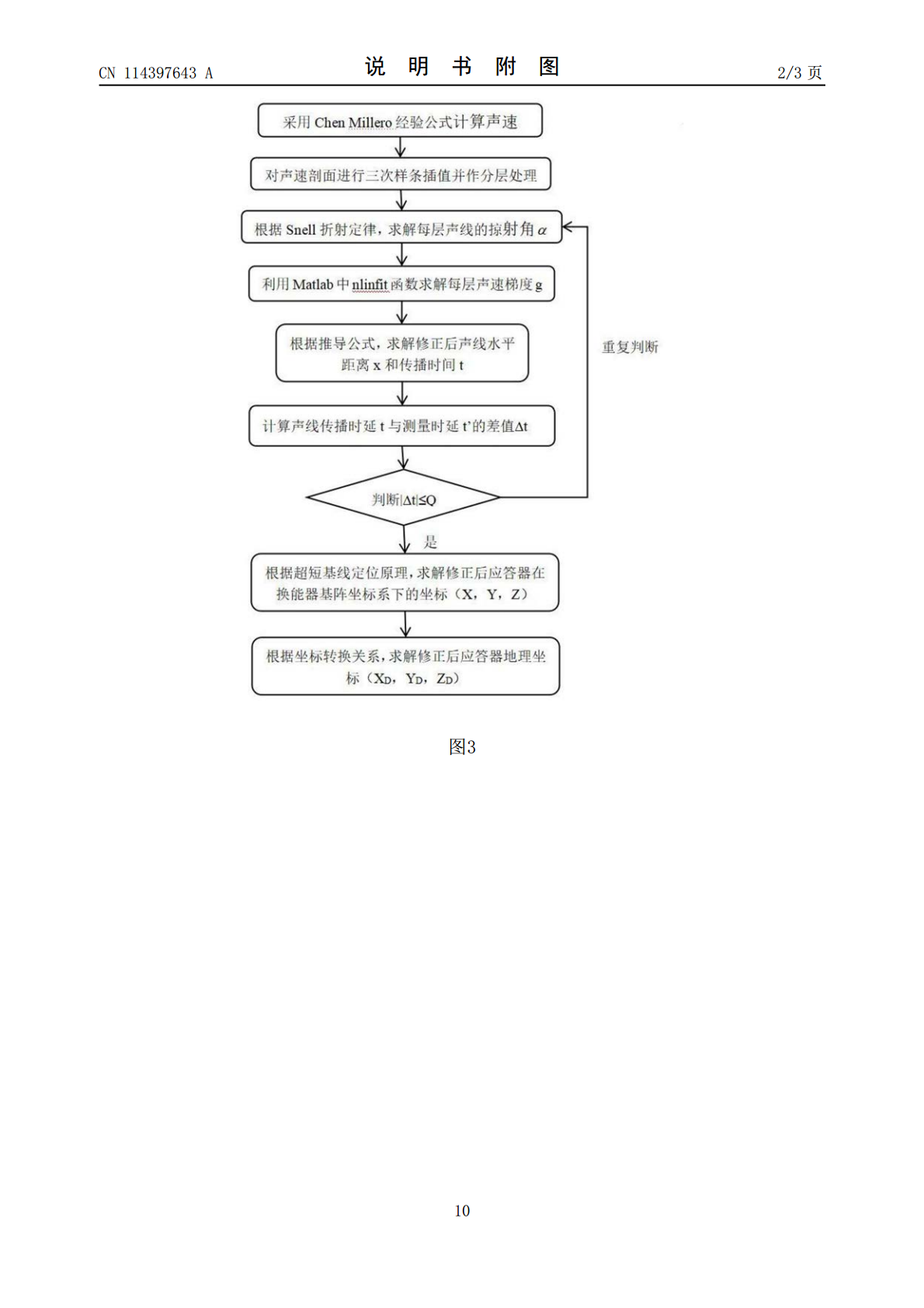
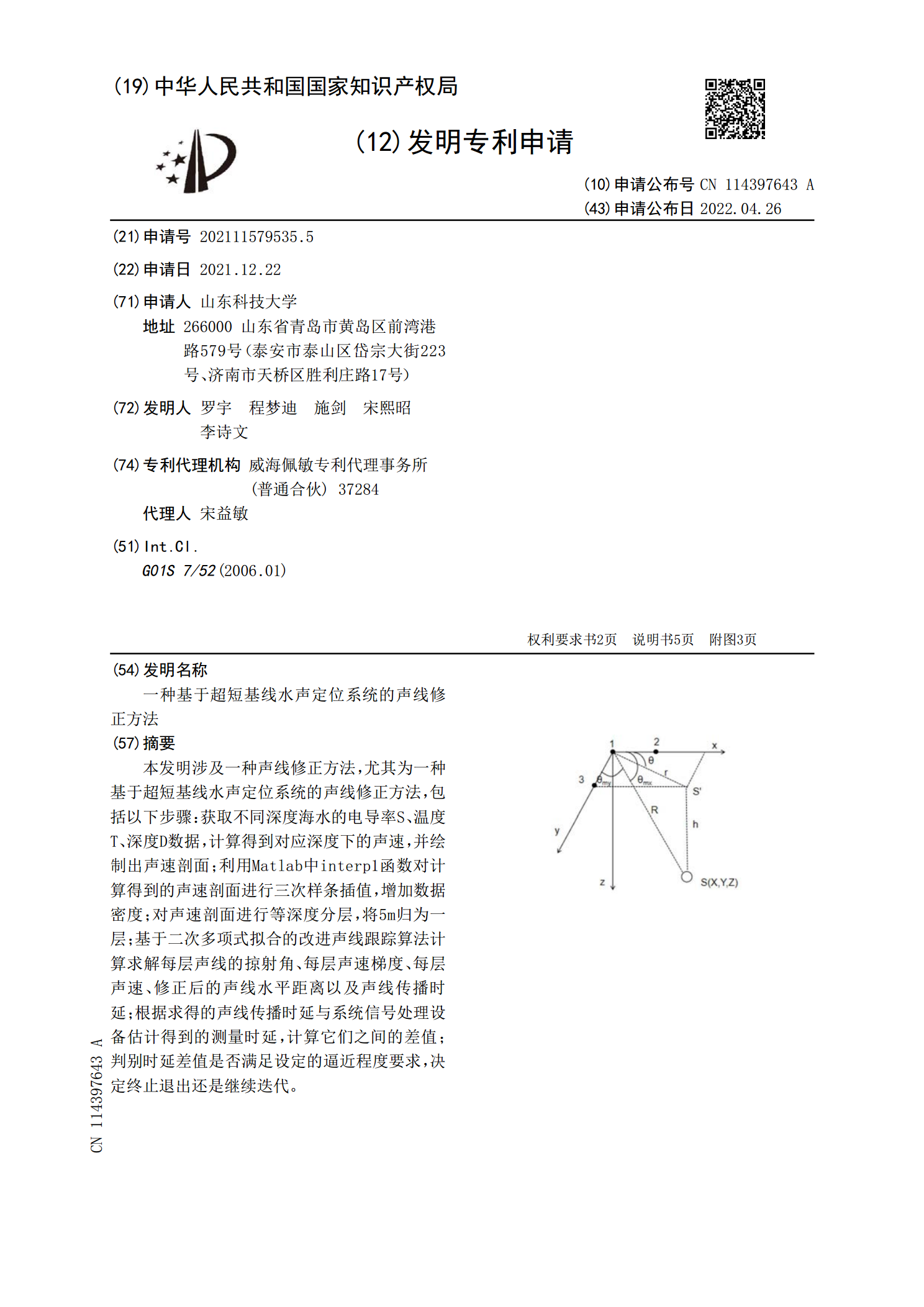
本发明涉及一种声线修正方法,尤其为一种基于超短基线水声定位系统的声线修正方法,包括以下步骤:获取不同深度海水的电导率S、温度T、深度D数据,计算得到对应深度下的声速,并绘制出声速剖面;利用Matlab中interp1函数对计算得到的声速剖面进行三次样条插值,增加数据密度;对声速剖面进行等深度分层,将5m归为一层;基于二次多项式拟合的改进声线跟踪算法计算求解每层声线的掠射角、每层声速梯度、每层声速、修正后的声线水平距离以及声线传播时延;根据求得的声线传播时延与系统信号处理设备估计得到的测量时延,计算它们之间

一种改进型声线修正算法在超短基线定位系统上的应用.docx
一种改进型声线修正算法在超短基线定位系统上的应用摘要超短基线定位系统是现代导航和遥感领域中的一种重要技术,对于提高定位精度和稳定性起到了关键的作用。声线作为超短基线定位系统的基础之一,其精度的改进对整个定位系统的精度有着直接影响。本文提出了一种改进型声线修正算法,并在超短基线定位系统上进行了应用探究。实验结果表明,该算法能够有效地改善声线定位的精度和稳定性,具有重要的应用价值。关键词:超短基线定位系统;声线修正算法;定位精度;稳定性。引言超短基线定位系统是一种测量技术,它可以通过声线或电波信号来确定测量点

基于超短基线水声定位的USVUUV协同导航方法.docx
基于超短基线水声定位的USVUUV协同导航方法基于超短基线水声定位的USV/UUV协同导航方法摘要:随着无人水面舰船(USV)和无人水下航行器(UUV)的发展,USV/UUV协同导航成为了一个研究热点。本文针对这一问题,提出了一种基于超短基线水声定位的USV/UUV协同导航方法。该方法利用水声信号进行定位,通过多传感器融合实现USV/UUV位置信息的融合和精确定位,进而实现协同导航。关键词:超短基线水声定位、USV/UUV协同导航、多传感器融合1.引言随着科技的发展,无人水面舰船(USV)和无人水下航行器

基于最小二乘法的超短基线水声定位系统校准方法.docx
基于最小二乘法的超短基线水声定位系统校准方法基于最小二乘法的超短基线水声定位系统校准方法摘要:超短基线(USBL)水声定位系统在水下定位和导航应用中具有重要意义,然而由于海洋环境的复杂性和硬件设备的误差,定位结果往往存在一定的误差。因此,对USBL定位系统进行准确的校准是提高定位精度的关键。本文提出了一种基于最小二乘法的USBL定位系统校准方法,该方法利用数学模型对定位误差进行建模,并通过最小化残差平方和来估计定位系统的误差参数。实验结果表明,该方法能够有效地减小USBL定位系统的误差,提高定位精度。关键
第3章_超短基线水声定位系统.ppt
水下定位与导航技术3.1引言超短基线系统的几种定位解算方式3.2入射角和深度方式(非同步信标信标方式)位置解算3.2入射角和深度方式(非同步信标信标方式)位置解算3.2入射角和深度方式(非同步信标信标方式)位置解算3.2入射角和深度方式(非同步信标信标方式)位置解算3.2入射角和深度方式(非同步信标信标方式)位置解算应答器3.4超短基线定位系统定位误差分析3.4超短基线定位系统定位误差分析3.4超短基线定位系统定位误差分析3.4超短基线定位系统定位误差分析3.4超短基线定位系统定位误差分析3.4超短基线定