
巡线机器人及其避障方法.pdf

雅云****彩妍

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

巡线机器人及其避障方法.pdf
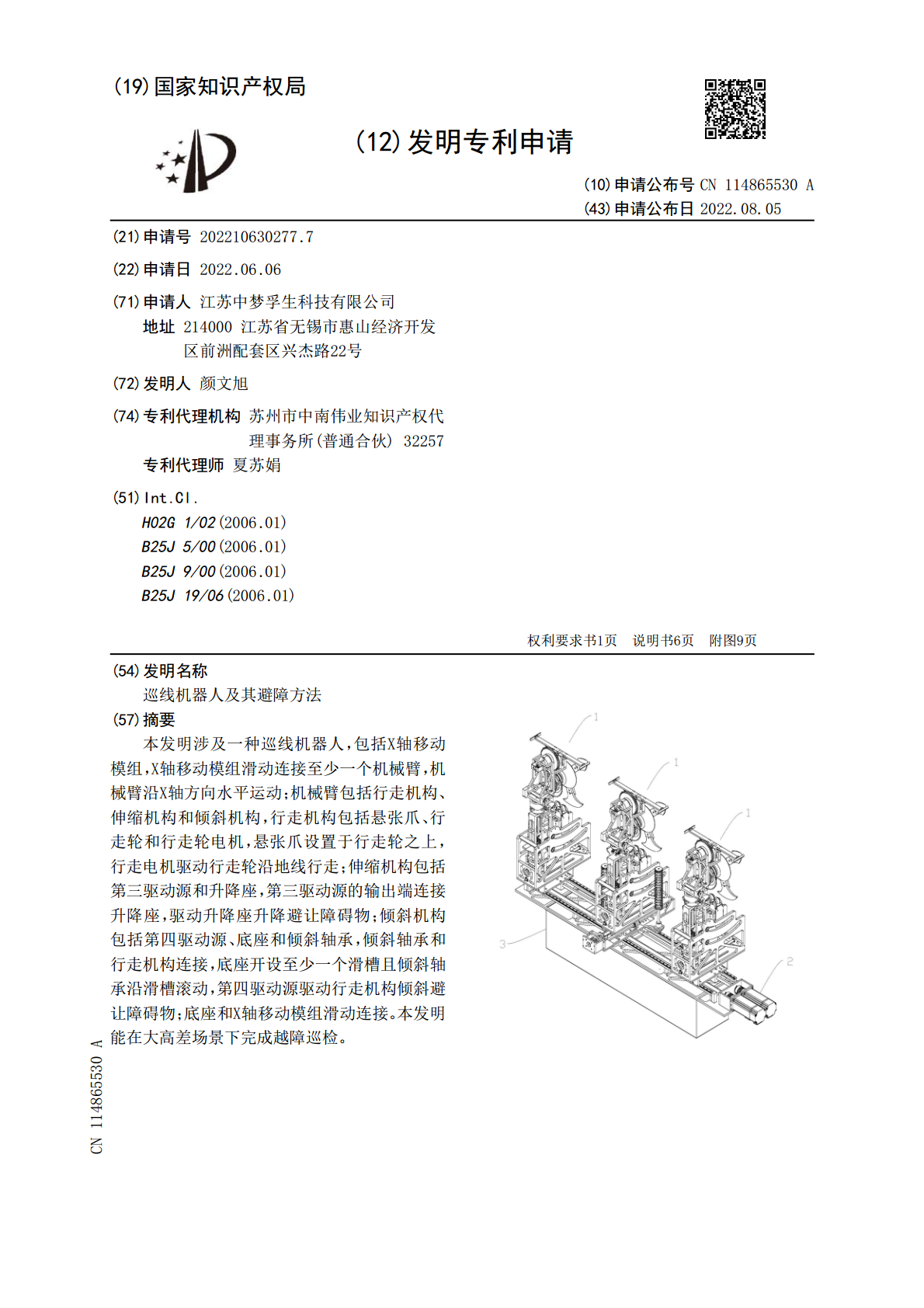
本发明涉及一种巡线机器人,包括X轴移动模组,X轴移动模组滑动连接至少一个机械臂,机械臂沿X轴方向水平运动;机械臂包括行走机构、伸缩机构和倾斜机构,行走机构包括悬张爪、行走轮和行走轮电机,悬张爪设置于行走轮之上,行走电机驱动行走轮沿地线行走;伸缩机构包括第三驱动源和升降座,第三驱动源的输出端连接升降座,驱动升降座升降避让障碍物;倾斜机构包括第四驱动源、底座和倾斜轴承,倾斜轴承和行走机构连接,底座开设至少一个滑槽且倾斜轴承沿滑槽滚动,第四驱动源驱动行走机构倾斜避让障碍物;底座和X轴移动模组滑动连接。本发明能在

清洁机器人及其避障方法.pdf
本申请实施例提供一种清洁机器人及其避障方法。清洁机器人包括主机以及设置在主机面板上的空间感测模块和避障感测模块,空间感测模块可识别工作环境中当前场景的空间大小,以判断主机是否能在此空间内行进,避障感测模块可提供第一视角感测范围和第二视角感测范围,并探测是否存在障碍物,消除第一视角感测范围的视野盲区,让主机能够无死角无障碍的执行清洁任务,从而消除任务执行时的不确定性,满足用户需求。
一种机器人及其避障方法和避障系统.pdf
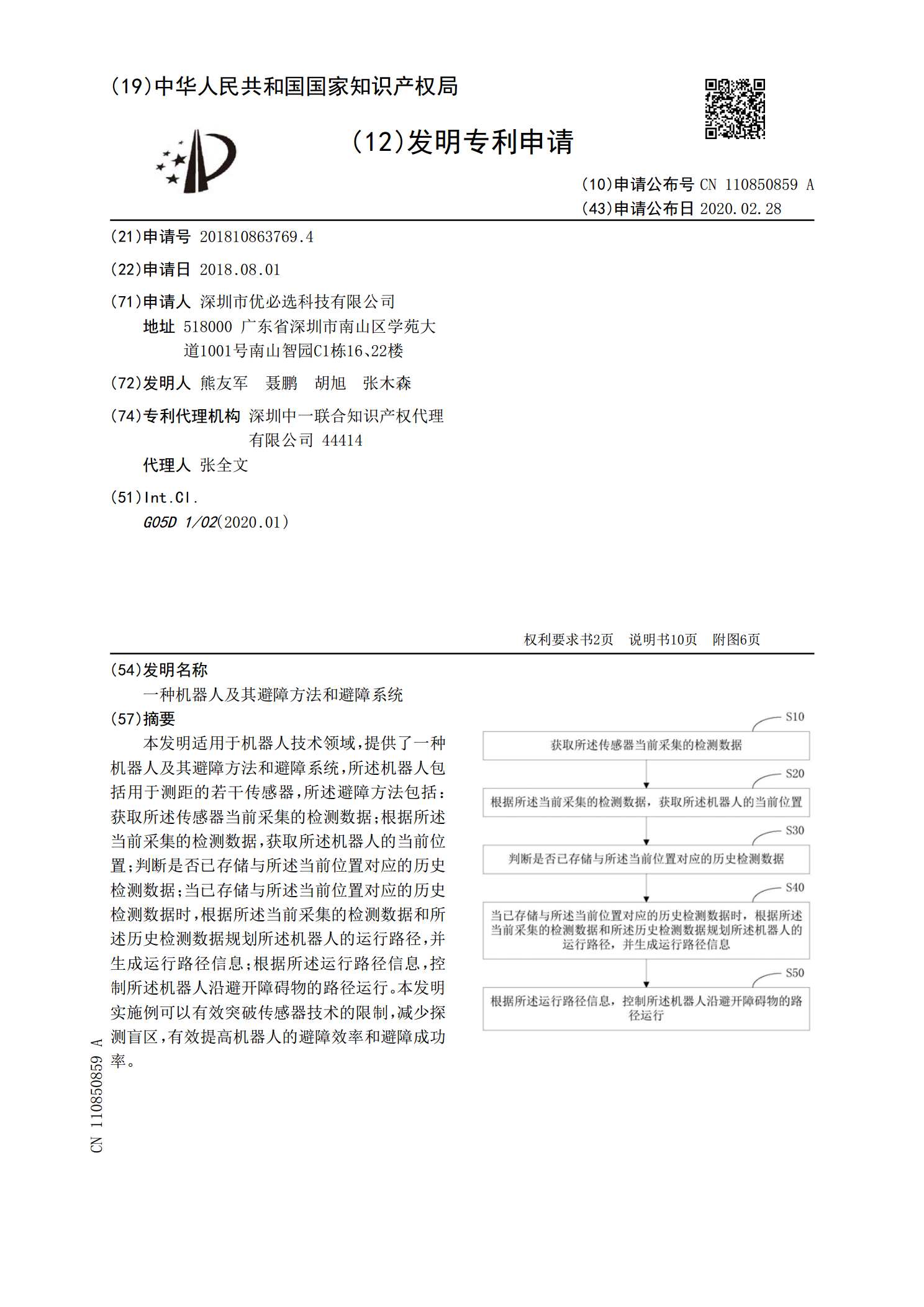
本发明适用于机器人技术领域,提供了一种机器人及其避障方法和避障系统,所述机器人包括用于测距的若干传感器,所述避障方法包括:获取所述传感器当前采集的检测数据;根据所述当前采集的检测数据,获取所述机器人的当前位置;判断是否已存储与所述当前位置对应的历史检测数据;当已存储与所述当前位置对应的历史检测数据时,根据所述当前采集的检测数据和所述历史检测数据规划所述机器人的运行路径,并生成运行路径信息;根据所述运行路径信息,控制所述机器人沿避开障碍物的路径运行。本发明实施例可以有效突破传感器技术的限制,减少探测盲区,有

扫地机器人及其避障方法.pdf
本发明涉及一种扫地机器人及其避障方法,该方法包括计算机在配置下执行以下步骤:在扫地机器人趋向障碍物的过程中,即时获取表征扫地机器人与障碍物两者之间距离的信号参数值;判断所述信号参数值是否达到极大值;当所述信号参数值达到极大值时,发出避障指令作场景判断方法,在扫地机器人趋向障碍物的过程中,扫地机器人与障碍物两者之间间距逐渐缩小为0,信号参数值随着间距变化,由0值增大至极大值,并从极大值缩小为0值,在信号参数值达到极大值时,发出避障指令可以有效避免扫地机器人与障碍物发生碰撞,同时,使得障碍物附近不存在工作盲区

基于对AGV智能巡迹避障物流车巡线方式的研究.docx
基于对AGV智能巡迹避障物流车巡线方式的研究摘要:AGV智能巡迹避障物流车是近年来物流仓储领域的一项新技术,其通过激光、摄像头等传感器感知环境,采用巡线行驶方式,实现自主避障运输。本文首先介绍了AGV智能巡迹避障物流车的基本原理,然后从巡线方式的角度出发对巡线方式进行了系统分析,对传统巡线方式和基于机器视觉的巡线方式进行了比较,并提出了在实际应用中需要注意的问题。关键词:AGV智能巡迹避障物流车;巡线方式;机器视觉;避障运输。一、引言AGV智能巡迹避障物流车是一种应用了激光、摄像头等传感器和机器视觉技术实