
一种自动放样方法、装置、存储介质以及系统.pdf

贤惠****66


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自动放样方法、装置、存储介质以及系统.pdf
本发明公开了一种自动放样方法、装置、存储介质以及系统。同时通过多台测量机器人和多个协作目标快速获取所有关键放样点高精度三维坐标,以及三维偏差信息,另一方面,通过数据交换和软件展示,使得放样人员均可以方便快捷地获取偏差信息,快速便捷地调整相关构件位置,该自动放样方法、装置、存储介质以及系统提升了放样的精确性和可管理性。
一种放样方法、装置、电子设备及存储介质.pdf
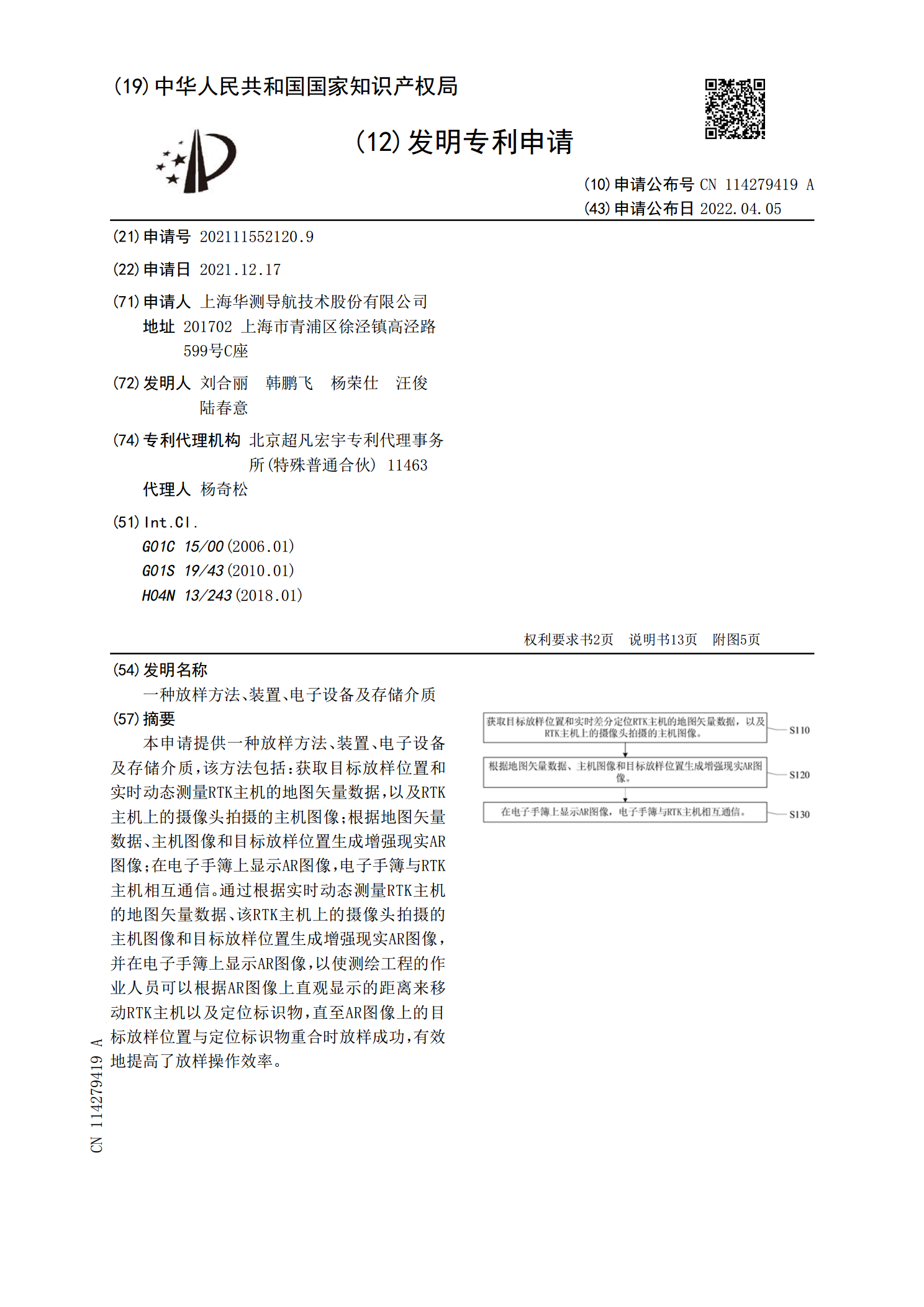
本申请提供一种放样方法、装置、电子设备及存储介质,该方法包括:获取目标放样位置和实时动态测量RTK主机的地图矢量数据,以及RTK主机上的摄像头拍摄的主机图像;根据地图矢量数据、主机图像和目标放样位置生成增强现实AR图像;在电子手簿上显示AR图像,电子手簿与RTK主机相互通信。通过根据实时动态测量RTK主机的地图矢量数据、该RTK主机上的摄像头拍摄的主机图像和目标放样位置生成增强现实AR图像,并在电子手簿上显示AR图像,以使测绘工程的作业人员可以根据AR图像上直观显示的距离来移动RTK主机以及定位标识物,直
自动泊车系统、自动泊车方法以及存储介质.pdf
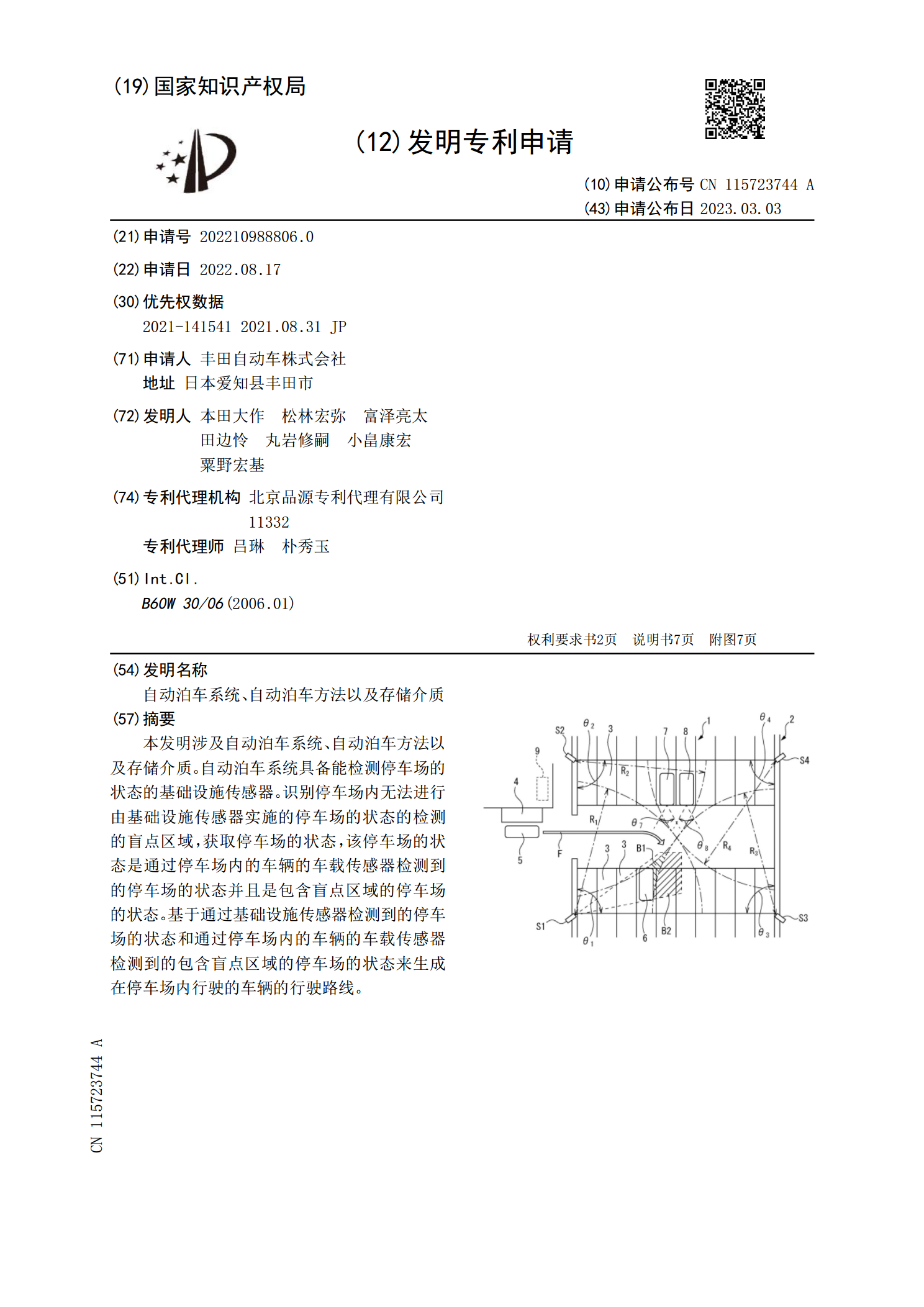
本发明涉及自动泊车系统、自动泊车方法以及存储介质。自动泊车系统具备能检测停车场的状态的基础设施传感器。识别停车场内无法进行由基础设施传感器实施的停车场的状态的检测的盲点区域,获取停车场的状态,该停车场的状态是通过停车场内的车辆的车载传感器检测到的停车场的状态并且是包含盲点区域的停车场的状态。基于通过基础设施传感器检测到的停车场的状态和通过停车场内的车辆的车载传感器检测到的包含盲点区域的停车场的状态来生成在停车场内行驶的车辆的行驶路线。
通信方法、装置、系统以及存储介质.pdf
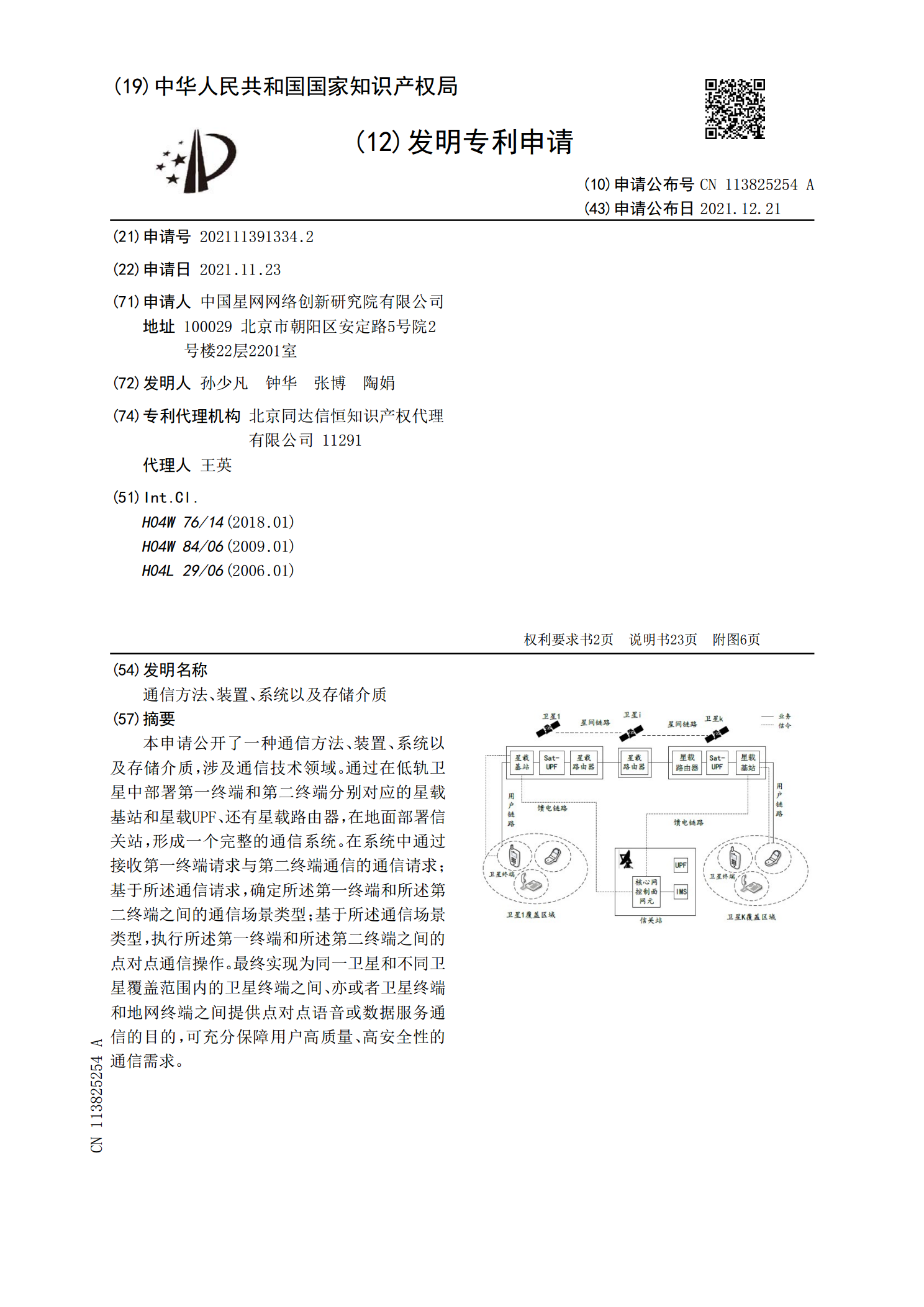
本申请公开了一种通信方法、装置、系统以及存储介质,涉及通信技术领域。通过在低轨卫星中部署第一终端和第二终端分别对应的星载基站和星载UPF、还有星载路由器,在地面部署信关站,形成一个完整的通信系统。在系统中通过接收第一终端请求与第二终端通信的通信请求;基于所述通信请求,确定所述第一终端和所述第二终端之间的通信场景类型;基于所述通信场景类型,执行所述第一终端和所述第二终端之间的点对点通信操作。最终实现为同一卫星和不同卫星覆盖范围内的卫星终端之间、亦或者卫星终端和地网终端之间提供点对点语音或数据服务通信的目的,

一种内容抓取方法、装置、系统以及存储介质.pdf
本发明涉及一种内容抓取方法、装置、系统以及存储介质。所述方法包括:服务器管理层获取抓取内容的配置信息,并将所述配置信息发送至业务逻辑层;业务逻辑层轮询更新所述服务器管理层发送的配置信息,并将更新的配置信息发送至通用通信控制层;通用通信控制层根据所述配置信息生成的测试脚本,并根据通用网络驱动协议将所述测试脚本发送至应用执行层;应用执行层接收并解析所述测试脚本,并调用与解析结果匹配的原生测试框架对解析结果执行抓取操作。