
基于多传感器信息融合技术的室内火灾搜救型机器人设计.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于多传感器信息融合技术的室内火灾搜救型机器人设计.docx
基于多传感器信息融合技术的室内火灾搜救型机器人设计标题:基于多传感器信息融合技术的室内火灾搜救型机器人设计摘要:随着科技的不断进步,机器人在各个领域发挥着重要的作用。室内火灾的发生是极其危险的,但传统的搜救方式受到了很多限制,无法完全保障被困人员的生命安全。因此,本研究提出了一种基于多传感器信息融合技术的室内火灾搜救型机器人设计方案,旨在提高搜救效率和准确性。关键词:室内火灾;机器人;传感器;信息融合;搜救效率1.引言室内火灾常常发生在人员密集的场所,如家庭、工厂、商业建筑等。火灾现场烟雾浓厚、温度高等特

基于多传感器信息融合技术的火灾探测系统研究和设计.pptx
基于多传感器信息融合技术的火灾探测系统研究和设计目录添加目录项标题研究背景和意义火灾探测系统的重要性和现状多传感器信息融合技术的优势和应用研究目的和意义多传感器信息融合技术原理信息融合基本概念和原理常用信息融合算法和实现方式信息融合在火灾探测系统中的应用系统总体设计和实现系统需求分析和设计思路系统硬件组成和选型系统软件设计和开发系统测试和性能评估实验结果和分析实验数据来源和实验环境实验结果展示和分析结果对比和优势分析结果讨论和改进建议结论和展望研究成果总结和评价未来研究方向和展望感谢观看

基于多传感器融合的室内机器人定位研究.docx
基于多传感器融合的室内机器人定位研究基于多传感器融合的室内机器人定位研究摘要:随着机器人技术的快速发展,室内机器人的定位成为研究的热点之一。室内环境的复杂性使得单一传感器在定位精度和鲁棒性方面存在局限性。因此,多传感器融合成为解决室内机器人定位问题的重要方法。本文研究了基于多传感器融合的室内机器人定位技术,重点探讨了传感器选择、数据融合算法和实验验证等方面的内容。通过综合利用不同传感器的信息,可以提高室内机器人的定位精度和鲁棒性,从而使其在室内环境中实现更加准确可靠的导航和定位。关键词:室内机器人;定位;
基于多模态融合定位的大鼠搜救机器人及搜救方法.pdf
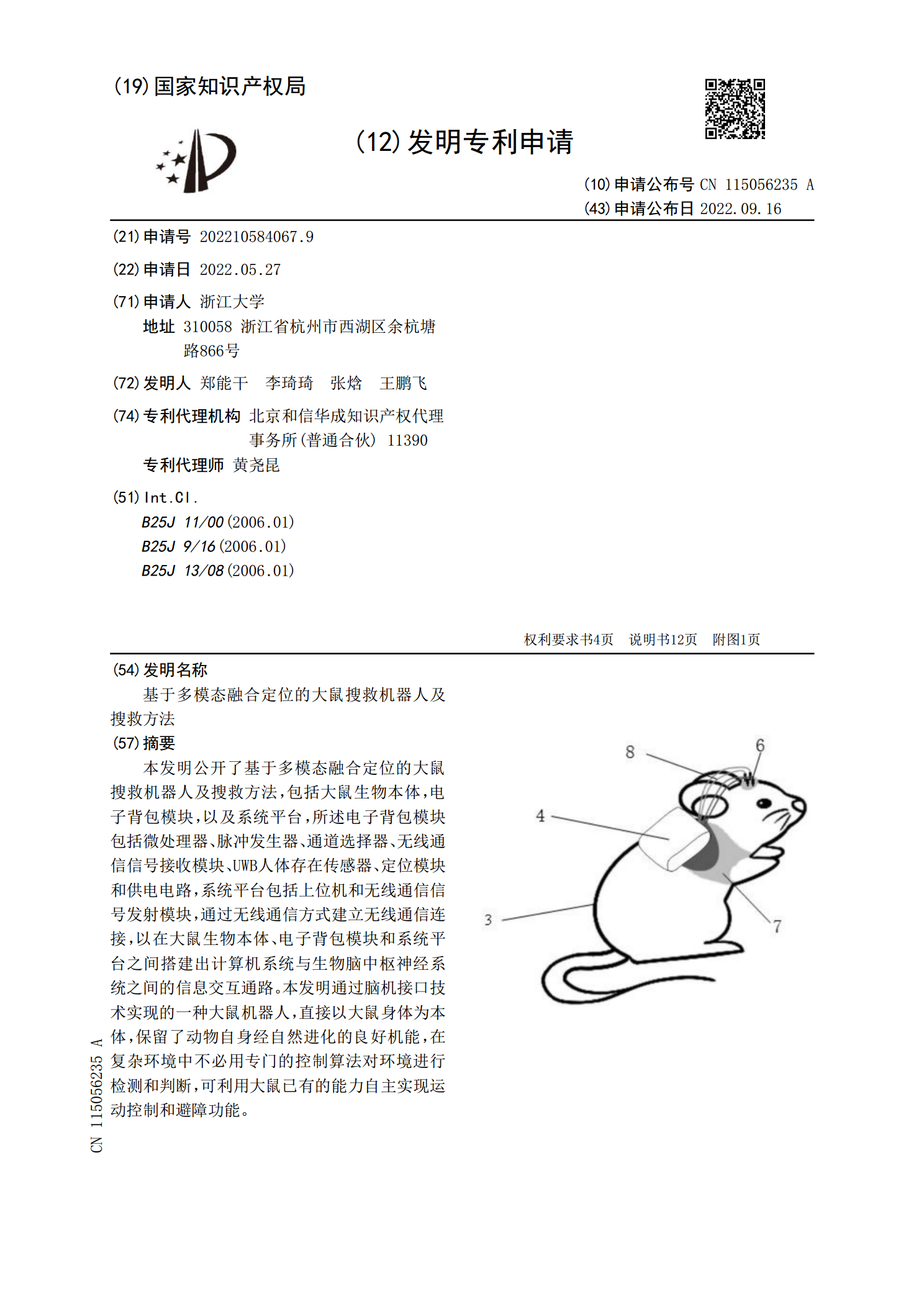
本发明公开了基于多模态融合定位的大鼠搜救机器人及搜救方法,包括大鼠生物本体,电子背包模块,以及系统平台,所述电子背包模块包括微处理器、脉冲发生器、通道选择器、无线通信信号接收模块、UWB人体存在传感器、定位模块和供电电路,系统平台包括上位机和无线通信信号发射模块,通过无线通信方式建立无线通信连接,以在大鼠生物本体、电子背包模块和系统平台之间搭建出计算机系统与生物脑中枢神经系统之间的信息交互通路。本发明通过脑机接口技术实现的一种大鼠机器人,直接以大鼠身体为本体,保留了动物自身经自然进化的良好机能,在复杂环境

基于多源传感器信息融合的火灾自动报警系统设计.docx
基于多源传感器信息融合的火灾自动报警系统设计随着社会的快速发展和人们对生活安全的要求越来越高,火灾自动报警系统已经成为了现代建筑安全的重要组成部分。为了提高火灾自动报警系统的准确性和及时性,多源传感器信息融合技术得到了广泛的研究和应用。本文将介绍火灾自动报警系统的基本构成和多源传感器信息融合技术的应用。一、火灾自动报警系统的基本构成火灾自动报警系统是由一组传感器、控制器、信号处理器和通信器件等组成的。基本构成包含了以下几个方面:1.传感器传感器是火灾自动报警系统的重要组成部分。传感器可以通过感应物理现象或