
空轨轨道梁形变实时检测方法、及装置.pdf

是你****盟主

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
空轨轨道梁形变实时检测方法、及装置.pdf
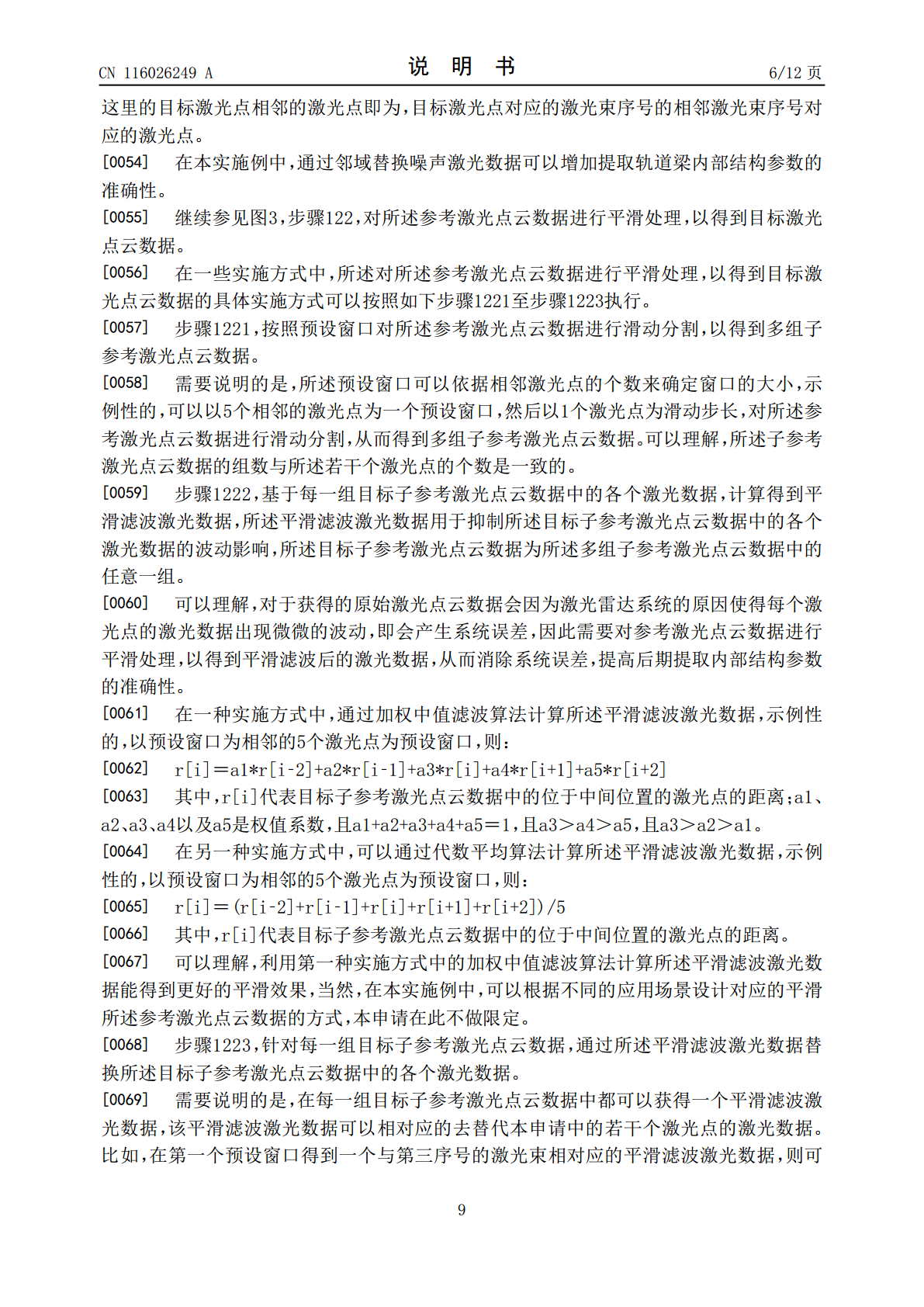
本申请的实施例提供了一种空轨轨道梁形变实时检测方法、装置、存储介质及电子设备,所述方法包括:获取激光雷达在目标位置扫描轨道梁而生成的激光点云数据,作为原始激光点云数据;基于所述原始激光点云数据计算提取所述轨道梁在所述目标位置处的内部结构参数;基于所述内部结构参数,通过预先构建的样本参数检测所述轨道梁在所述目标位置处的形变,并记录检测日志。本申请实施例的技术方案能实现对空轨轨道梁形变的精准实时检测,同时实现对空轨轨道梁的远程运维。
第三轨检测装置及轨道检测设备.pdf
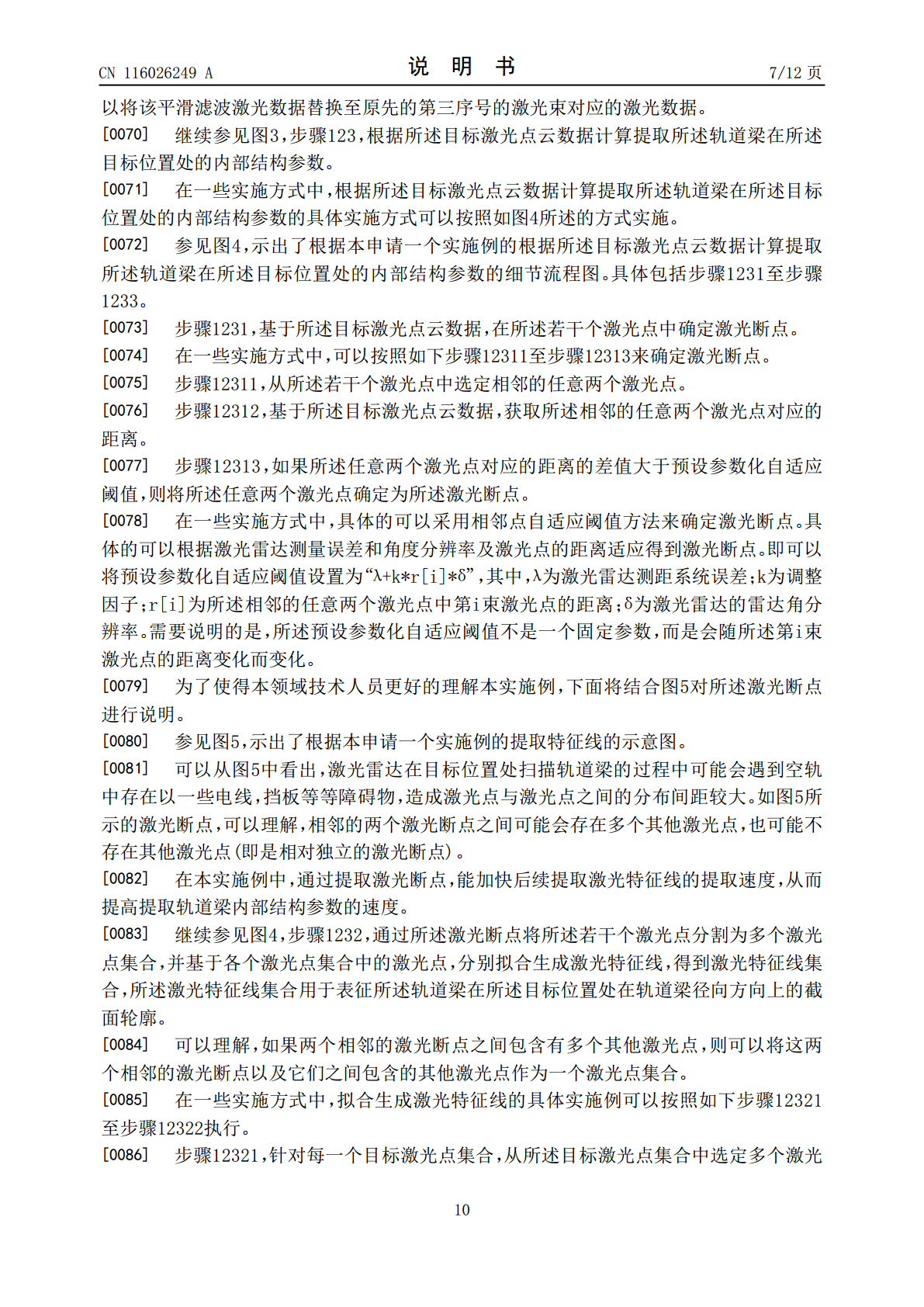
本发明提供一种第三轨检测装置及轨道检测设备,该装置包括:机架体,其顶部延伸出一把手,把手的内部设有一收容腔;末端测量机构,其包括测量轮架、高低测量轮、偏移测量轮及第二复位弹簧,高低测量轮设置在测量轮架上,测量轮架上设有滑块,偏移测量轮设于滑块上,第二复位弹簧连接在滑块和所述测量轮架之间;四连杆机构,铰接于机架体和末端测量机构之间,机架体与四连杆机构之间连接第一复位弹簧;第一位移传感器,其一端铰接于收容腔内,另一端与四连杆机构铰接;第二位移传感器,其水平布置,且连接在测量轮架和滑块之间。本发明中的第三轨检测
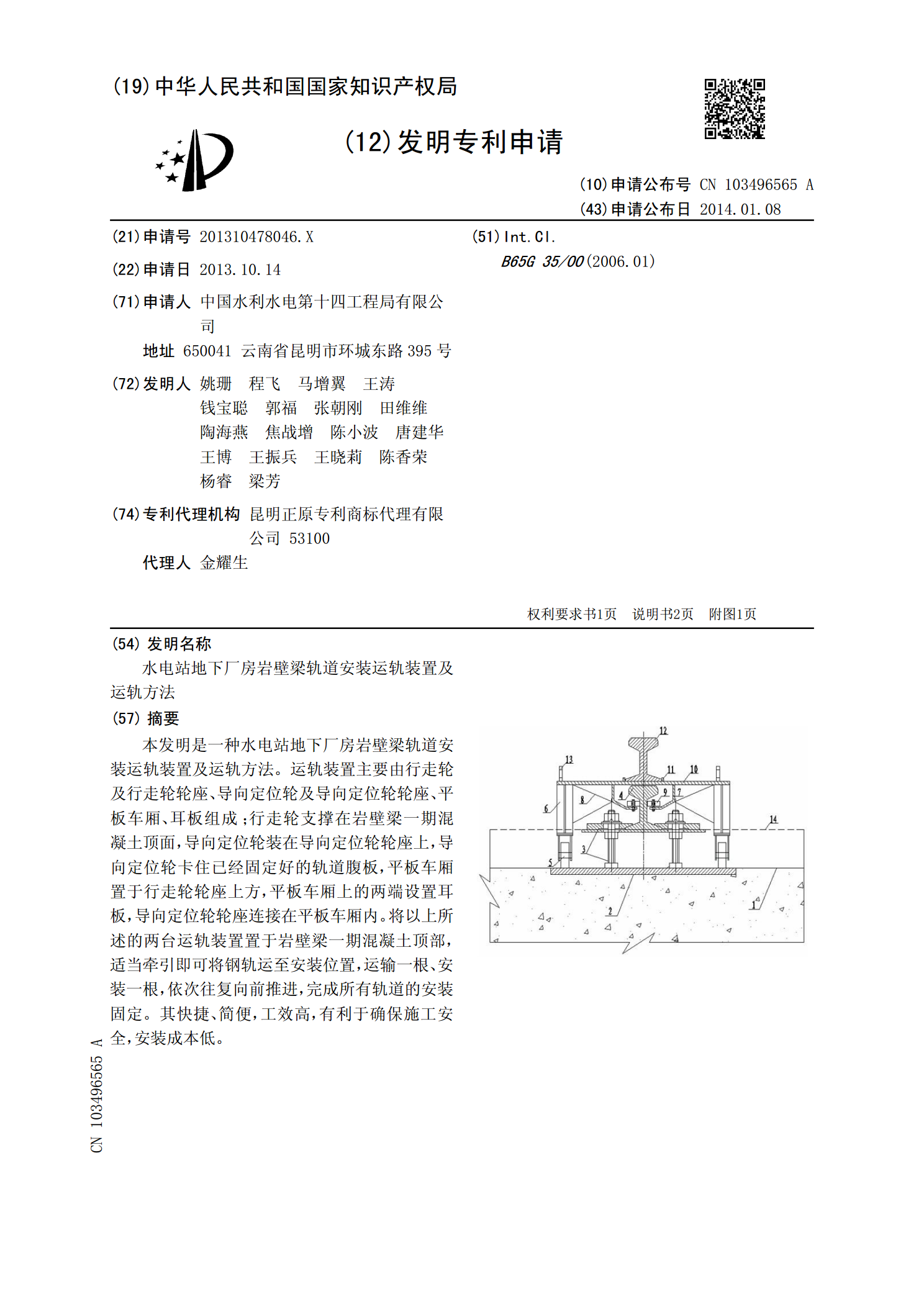
水电站地下厂房岩壁梁轨道安装运轨装置及运轨方法.pdf
本发明是一种水电站地下厂房岩壁梁轨道安装运轨装置及运轨方法。运轨装置主要由行走轮及行走轮轮座、导向定位轮及导向定位轮轮座、平板车厢、耳板组成;行走轮支撑在岩壁梁一期混凝土顶面,导向定位轮装在导向定位轮轮座上,导向定位轮卡住已经固定好的轨道腹板,平板车厢置于行走轮轮座上方,平板车厢上的两端设置耳板,导向定位轮轮座连接在平板车厢内。将以上所述的两台运轨装置置于岩壁梁一期混凝土顶部,适当牵引即可将钢轨运至安装位置,运输一根、安装一根,依次往复向前推进,完成所有轨道的安装固定。其快捷、简便,工效高,有利于确保施工
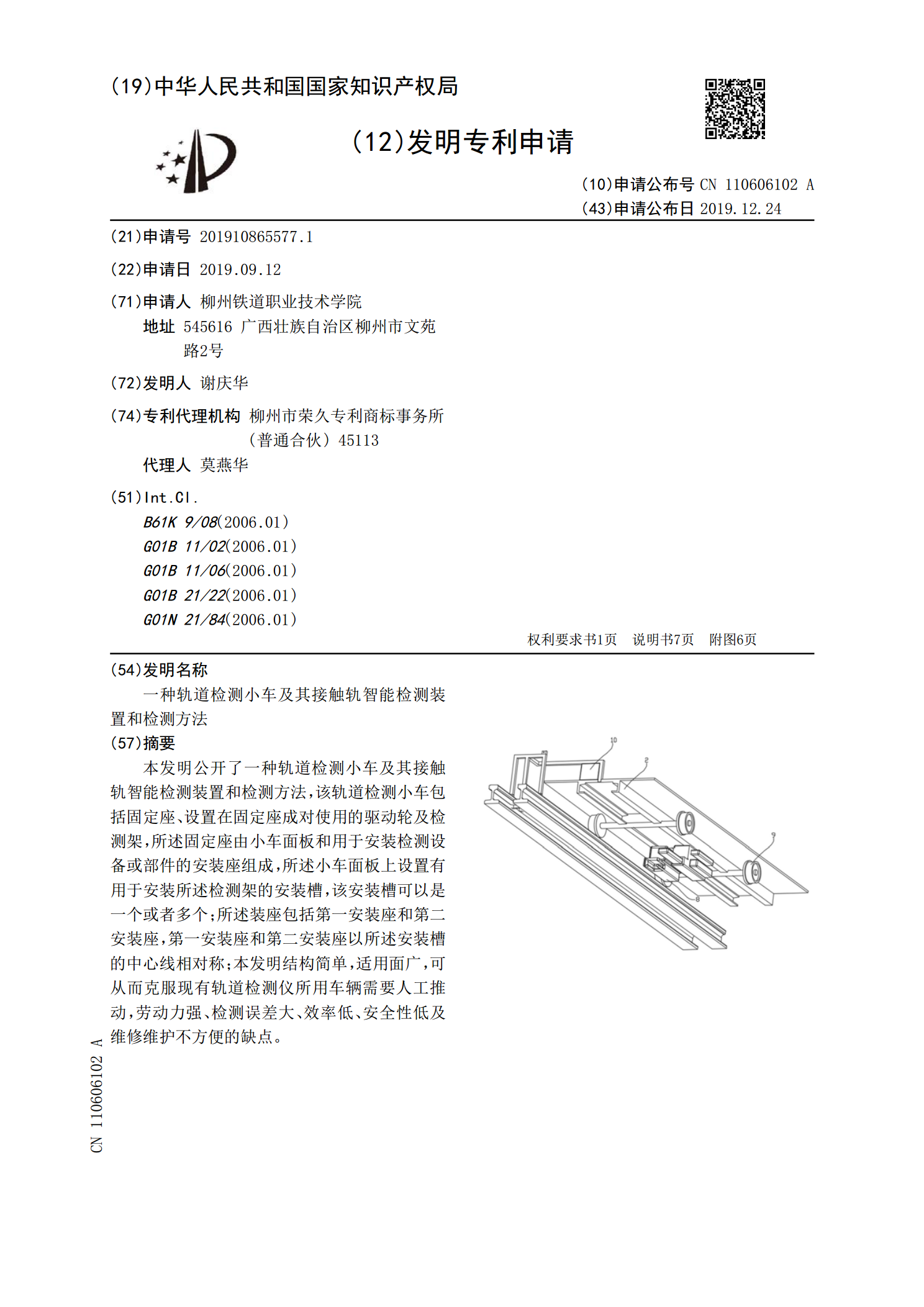
一种轨道检测小车及其接触轨智能检测装置和检测方法.pdf
本发明公开了一种轨道检测小车及其接触轨智能检测装置和检测方法,该轨道检测小车包括固定座、设置在固定座成对使用的驱动轮及检测架,所述固定座由小车面板和用于安装检测设备或部件的安装座组成,所述小车面板上设置有用于安装所述检测架的安装槽,该安装槽可以是一个或者多个;所述装座包括第一安装座和第二安装座,第一安装座和第二安装座以所述安装槽的中心线相对称;本发明结构简单,适用面广,可从而克服现有轨道检测仪所用车辆需要人工推动,劳动力强、检测误差大、效率低、安全性低及维修维护不方便的缺点。
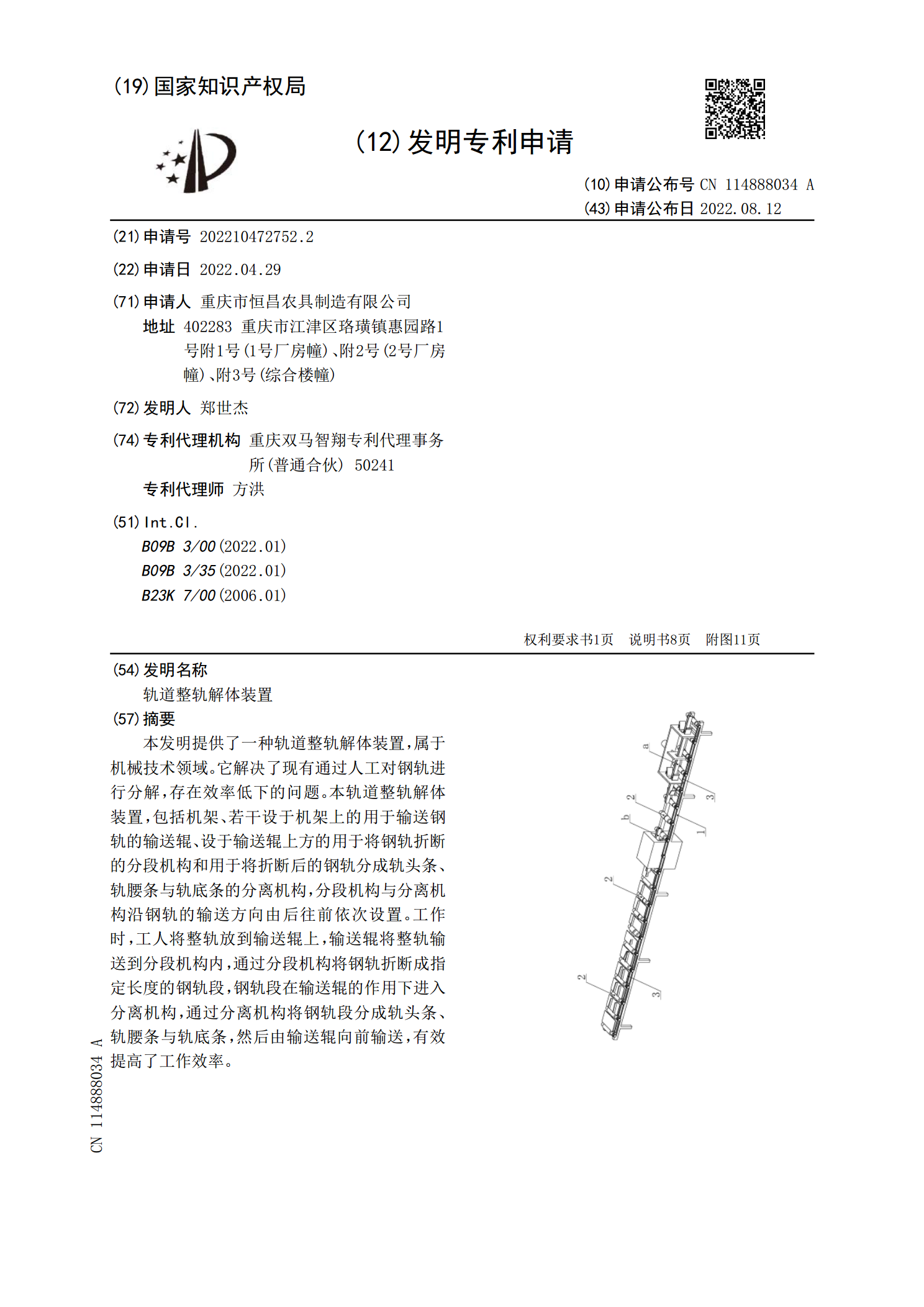
轨道整轨解体装置.pdf
本发明提供了一种轨道整轨解体装置,属于机械技术领域。它解决了现有通过人工对钢轨进行分解,存在效率低下的问题。本轨道整轨解体装置,包括机架、若干设于机架上的用于输送钢轨的输送辊、设于输送辊上方的用于将钢轨折断的分段机构和用于将折断后的钢轨分成轨头条、轨腰条与轨底条的分离机构,分段机构与分离机构沿钢轨的输送方向由后往前依次设置。工作时,工人将整轨放到输送辊上,输送辊将整轨输送到分段机构内,通过分段机构将钢轨折断成指定长度的钢轨段,钢轨段在输送辊的作用下进入分离机构,通过分离机构将钢轨段分成轨头条、轨腰条与轨底