
基于车路协同技术针对车辆变道行为的生态驾驶方法.pdf

An****99


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于车路协同技术针对车辆变道行为的生态驾驶方法.pdf
本发明公开了一种基于车路协同技术针对车辆变道行为的生态驾驶方法。本发明的方法包括如下步骤:步骤1.检验车辆初始间距条件:步骤2.获得安全驾驶策略:在设定车辆加、减速度的最大值,以及变速的最长时间的情况下,寻找满足步骤1中四种间距情况下,每一种间距条件下能够使三辆车安全驾驶且完成变道行为的各车辆的加、减速度值及变速时间,由此获得车辆安全驾驶解集;步骤3.获得生态驾驶策略:在步骤2得到的安全驾驶策略解集中,寻找使得三辆车在变道行为及其后累计一公里行程内总油耗最低的驾驶方法,由此获得车辆变道行为的生态驾驶策略。
一种基于车路协同的多车协作式变道方法.pdf
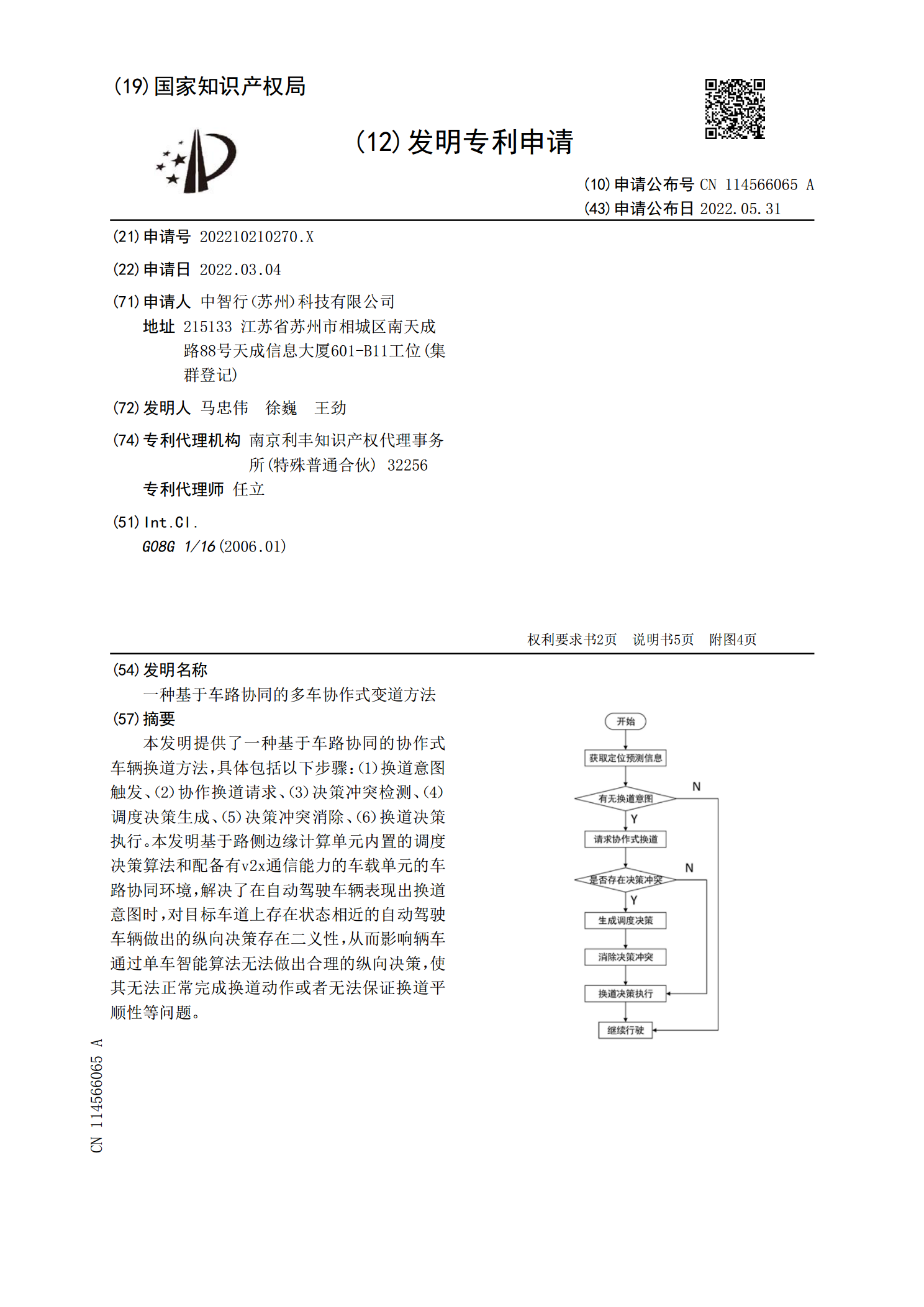
本发明提供了一种基于车路协同的协作式车辆换道方法,具体包括以下步骤:(1)换道意图触发、(2)协作换道请求、(3)决策冲突检测、(4)调度决策生成、(5)决策冲突消除、(6)换道决策执行。本发明基于路侧边缘计算单元内置的调度决策算法和配备有v2x通信能力的车载单元的车路协同环境,解决了在自动驾驶车辆表现出换道意图时,对目标车道上存在状态相近的自动驾驶车辆做出的纵向决策存在二义性,从而影响辆车通过单车智能算法无法做出合理的纵向决策,使其无法正常完成换道动作或者无法保证换道平顺性等问题。
一种基于车路协同的有人/无人驾驶车辆的编队控制方法.pdf
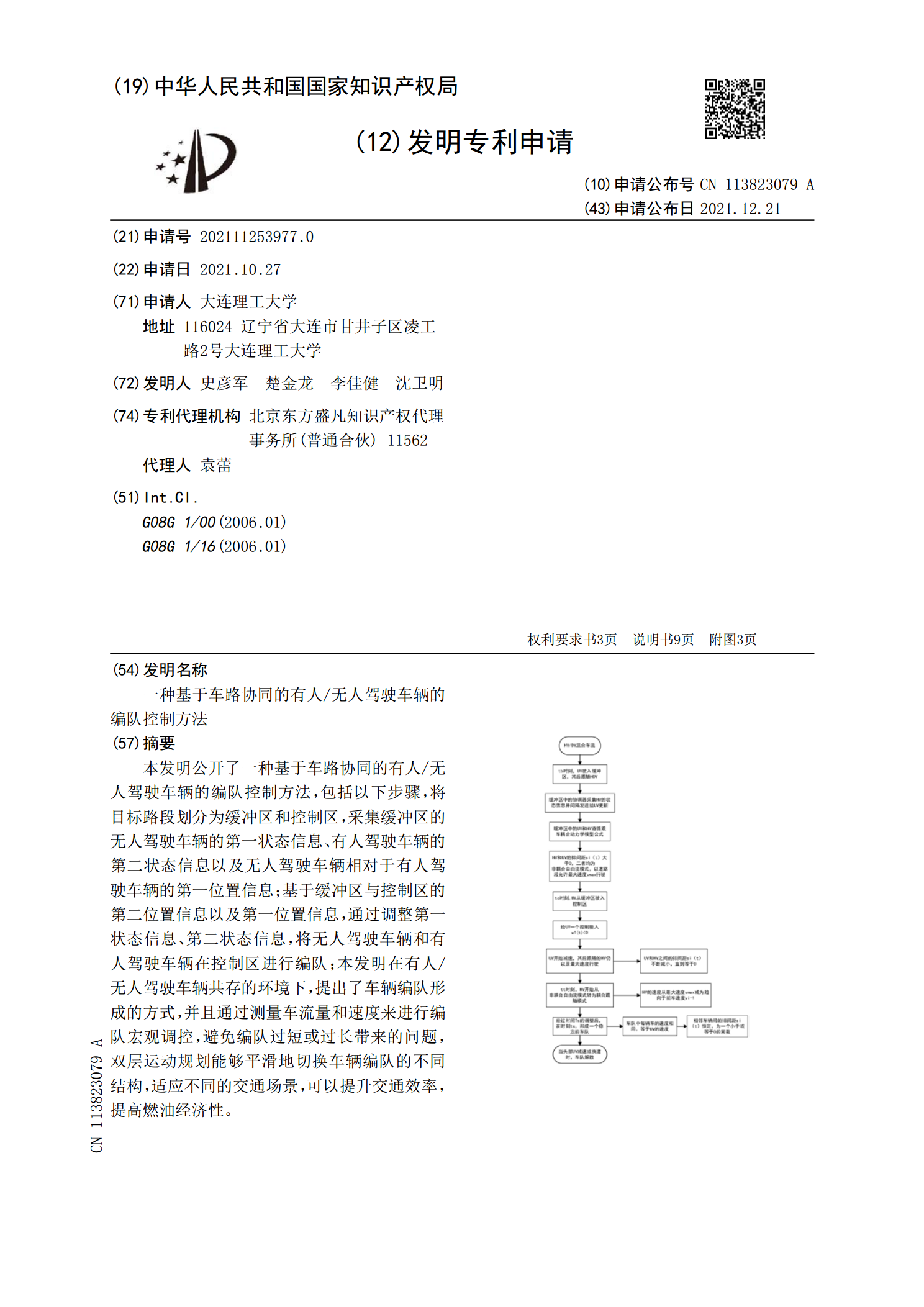
本发明公开了一种基于车路协同的有人/无人驾驶车辆的编队控制方法,包括以下步骤,将目标路段划分为缓冲区和控制区,采集缓冲区的无人驾驶车辆的第一状态信息、有人驾驶车辆的第二状态信息以及无人驾驶车辆相对于有人驾驶车辆的第一位置信息;基于缓冲区与控制区的第二位置信息以及第一位置信息,通过调整第一状态信息、第二状态信息,将无人驾驶车辆和有人驾驶车辆在控制区进行编队;本发明在有人/无人驾驶车辆共存的环境下,提出了车辆编队形成的方式,并且通过测量车流量和速度来进行编队宏观调控,避免编队过短或过长带来的问题,双层运动规划
基于车路协同的自动驾驶控制方法及系统.pdf
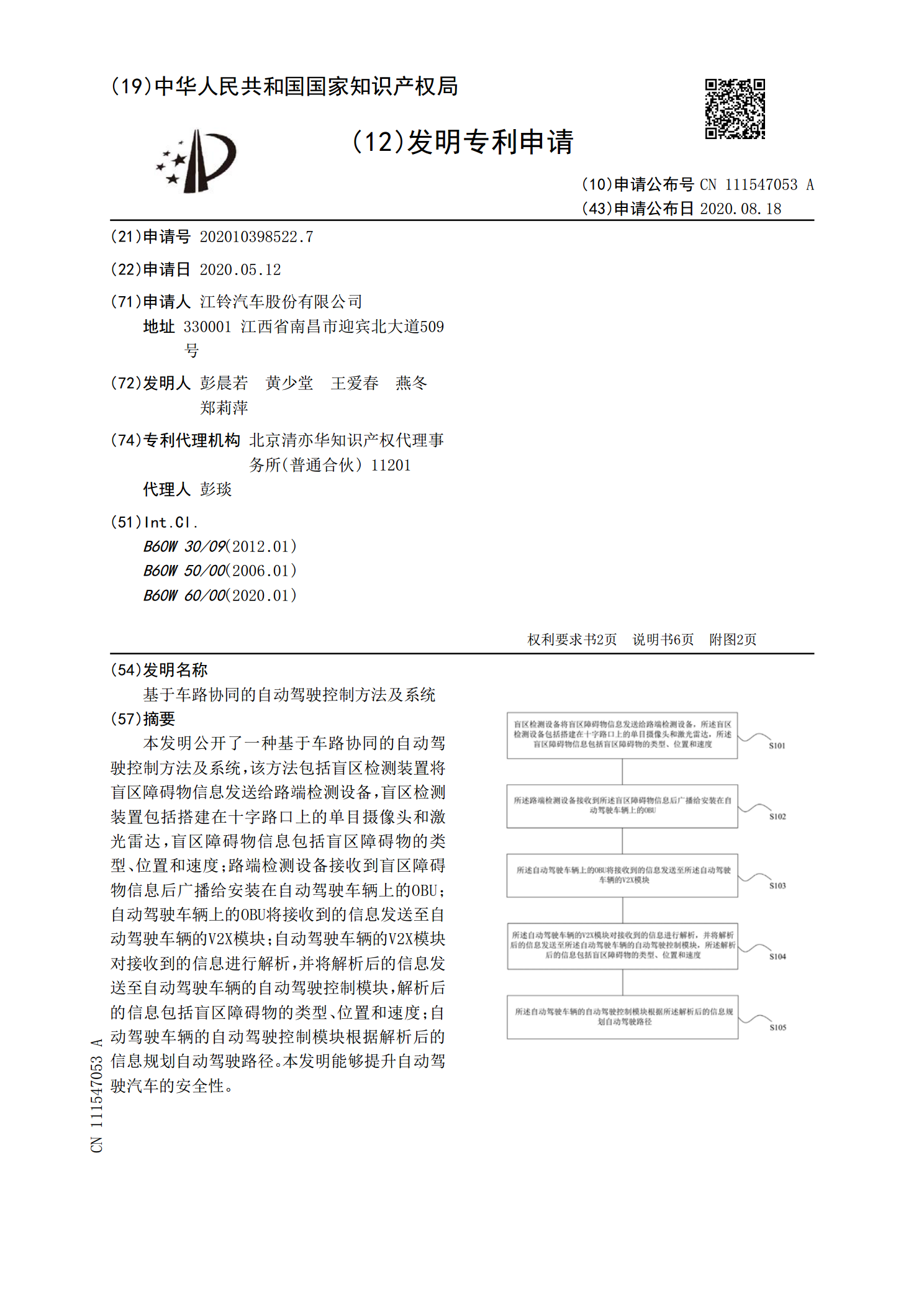
本发明公开了一种基于车路协同的自动驾驶控制方法及系统,该方法包括盲区检测装置将盲区障碍物信息发送给路端检测设备,盲区检测装置包括搭建在十字路口上的单目摄像头和激光雷达,盲区障碍物信息包括盲区障碍物的类型、位置和速度;路端检测设备接收到盲区障碍物信息后广播给安装在自动驾驶车辆上的OBU;自动驾驶车辆上的OBU将接收到的信息发送至自动驾驶车辆的V2X模块;自动驾驶车辆的V2X模块对接收到的信息进行解析,并将解析后的信息发送至自动驾驶车辆的自动驾驶控制模块,解析后的信息包括盲区障碍物的类型、位置和速度;自动驾驶
基于车路协同的无人驾驶车辆紧急避险感知与决策系统.pdf
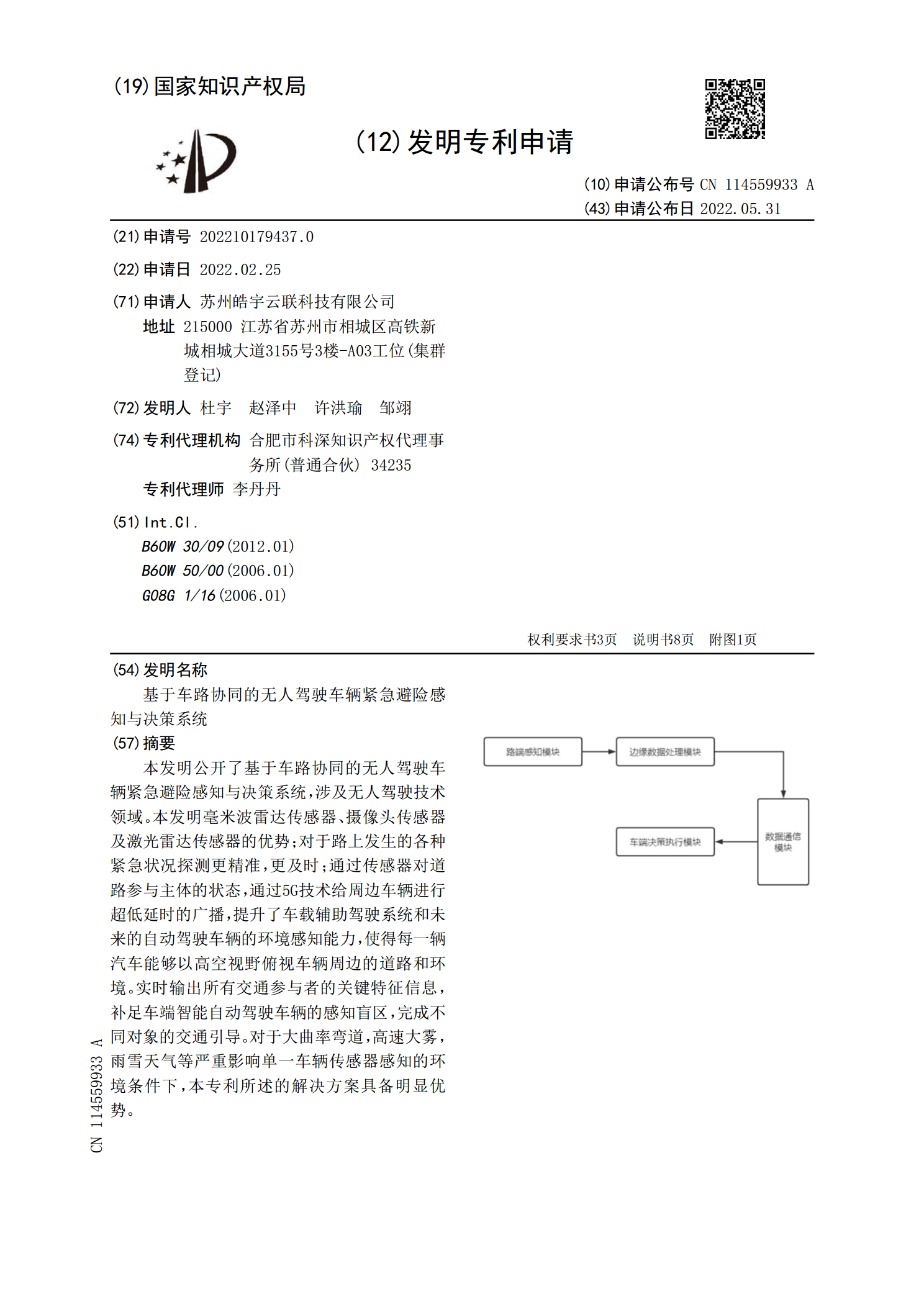
本发明公开了基于车路协同的无人驾驶车辆紧急避险感知与决策系统,涉及无人驾驶技术领域。本发明毫米波雷达传感器、摄像头传感器及激光雷达传感器的优势;对于路上发生的各种紧急状况探测更精准,更及时;通过传感器对道路参与主体的状态,通过5G技术给周边车辆进行超低延时的广播,提升了车载辅助驾驶系统和未来的自动驾驶车辆的环境感知能力,使得每一辆汽车能够以高空视野俯视车辆周边的道路和环境。实时输出所有交通参与者的关键特征信息,补足车端智能自动驾驶车辆的感知盲区,完成不同对象的交通引导。对于大曲率弯道,高速大雾,雨雪天气等