
多无人机协同侦察路径规划研究.docx

骑着****猪猪


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

多无人机协同侦察路径规划研究.docx
多无人机协同侦察路径规划研究随着无人机技术的不断发展,无人机在军事、航空、医疗、物流等领域中得到了广泛的应用。其中,无人机侦察是目前无人机应用领域中的一个热点。无人机侦察在实际应用中,需要多架无人机协同侦察同一区域,以获取更加全面、准确的图像信息。在这种情况下,无人机的协同侦察路径规划就成为了一个关键问题,本文主要探讨了多无人机协同侦察路径规划的研究。一、多无人机协同侦察路径规划的研究意义多无人机协同侦察路径规划的研究具有以下意义:(1)提高侦察效率多无人机协同侦察能够实现对目标区域的快速覆盖,有效地提高

多无人机系统协同侦察规划算法研究.docx
多无人机系统协同侦察规划算法研究随着无人机技术的快速发展和普及,多无人机系统的应用也越来越广泛,其中无人机的侦察任务是其中的重要应用之一。在多无人机系统的协同侦察任务中,如何高效的规划路径成为了一个关键问题。本文将从多无人机系统协同侦察的任务需求入手,介绍其规划算法及应用。一、多无人机系统协同侦察任务需求在多无人机系统协同侦察任务中,无人机的数量和分布情况都会影响任务的完成效率和成功率。因此,需要考虑以下任务需求:1.任务执行效率需求:在侦察的过程中,需要完成大面积的侦察区域,并且需要较短的时间内完成,因

一种多无人机多载荷协同侦察方法.pdf
本发明属于无人机任务规划技术领域,公开了一种多无人机多载荷协同侦察方法,根据给定的无人机数量、各载荷探测半径以及任务区域进行无人机离线航迹规划;在无人机巡航过程中,若有移动目标进入无人机载荷探测范围,无人机进行在线航迹规划,对目标持续跟踪,跟踪结束,返回原航迹继续巡航。本发明在不损失跟踪精度的前提下,通过考虑让执行侦察任务的无人机搭载不同功能特点的载荷,实现了一种全新的多无人机协同模式。使发现目标更快,完成任务用时大大缩短,任务执行效率得到明显提升。本发明中涉及到的区域划分算法、跟踪滤波算法等均不唯一,可

基于信息共享的无人机协同侦察路径规划方法.pdf
本发明公开了一种基于信息共享的无人机协同侦察路径规划方法,属于无人机路径规划领域,以降低多无人机总能耗。本发明将侦察区域均分成多个子区域,每个子区域的区域中心确定为信息共享点,利用遗传算法得出一条遍历所有侦察目标点的完整路径,根据该路径中的目标点数目确定多个整数拆分方案,从而得到多个代表一架无人机的子路径;针对每一个拆分方案,判断无人机的信息共享关系,以总能耗最小原则确定每组无人机的信息共享点,无人机在信息共享点相互共享信息并确定服务的用户;保留当前总能耗最小的无人机路径方案,将当前完整路径通过遗传操作生
车辆与多无人机协同路径规划方法、装置、终端及介质.pdf
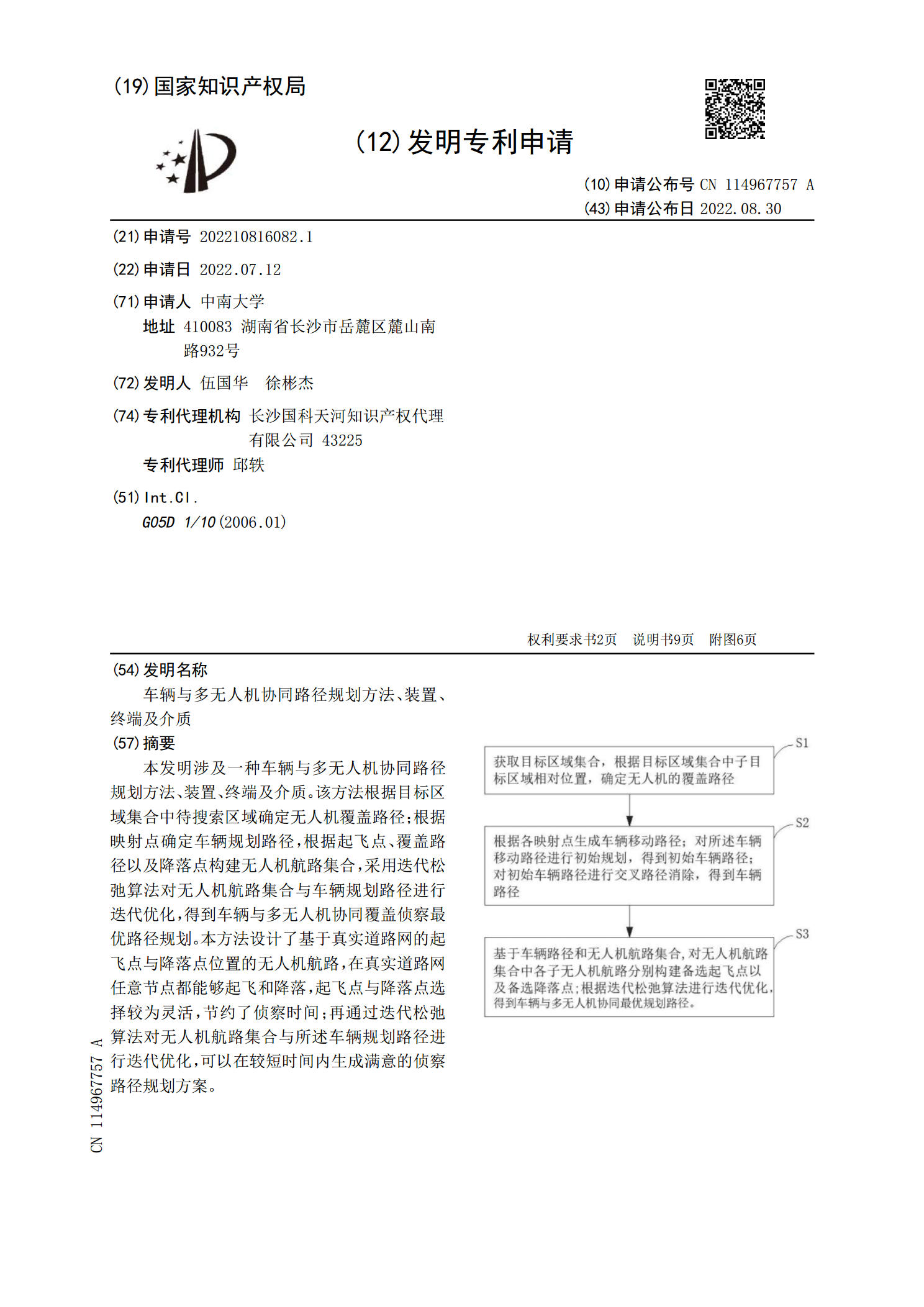
本发明涉及一种车辆与多无人机协同路径规划方法、装置、终端及介质。该方法根据目标区域集合中待搜索区域确定无人机覆盖路径;根据映射点确定车辆规划路径,根据起飞点、覆盖路径以及降落点构建无人机航路集合,采用迭代松弛算法对无人机航路集合与车辆规划路径进行迭代优化,得到车辆与多无人机协同覆盖侦察最优路径规划。本方法设计了基于真实道路网的起飞点与降落点位置的无人机航路,在真实道路网任意节点都能够起飞和降落,起飞点与降落点选择较为灵活,节约了侦察时间;再通过迭代松弛算法对无人机航路集合与所述车辆规划路径进行迭代优化,可