
基于死区补偿的码垛机械臂控制算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于死区补偿的码垛机械臂控制算法.docx
基于死区补偿的码垛机械臂控制算法基于死区补偿的码垛机械臂控制算法摘要:码垛机械臂是一种常用于物流业中的自动化设备,用于将物体从一个位置堆叠到另一个位置。然而,由于机械臂本身和外部环境的因素,存在一定的死区问题,导致机械臂的运动控制不够准确。为了解决这个问题,本文提出了一种基于死区补偿的码垛机械臂控制算法。该算法通过对死区进行建模,并根据建模结果进行补偿,可以更精确地控制机械臂的运动,提高码垛的准确性和效率。实验结果表明,该算法能够有效地解决死区问题,并显著提升机械臂的控制性能。关键词:码垛机械臂,死区补偿
保证瞬态性能的机械臂伺服系统死区补偿控制方法.pdf
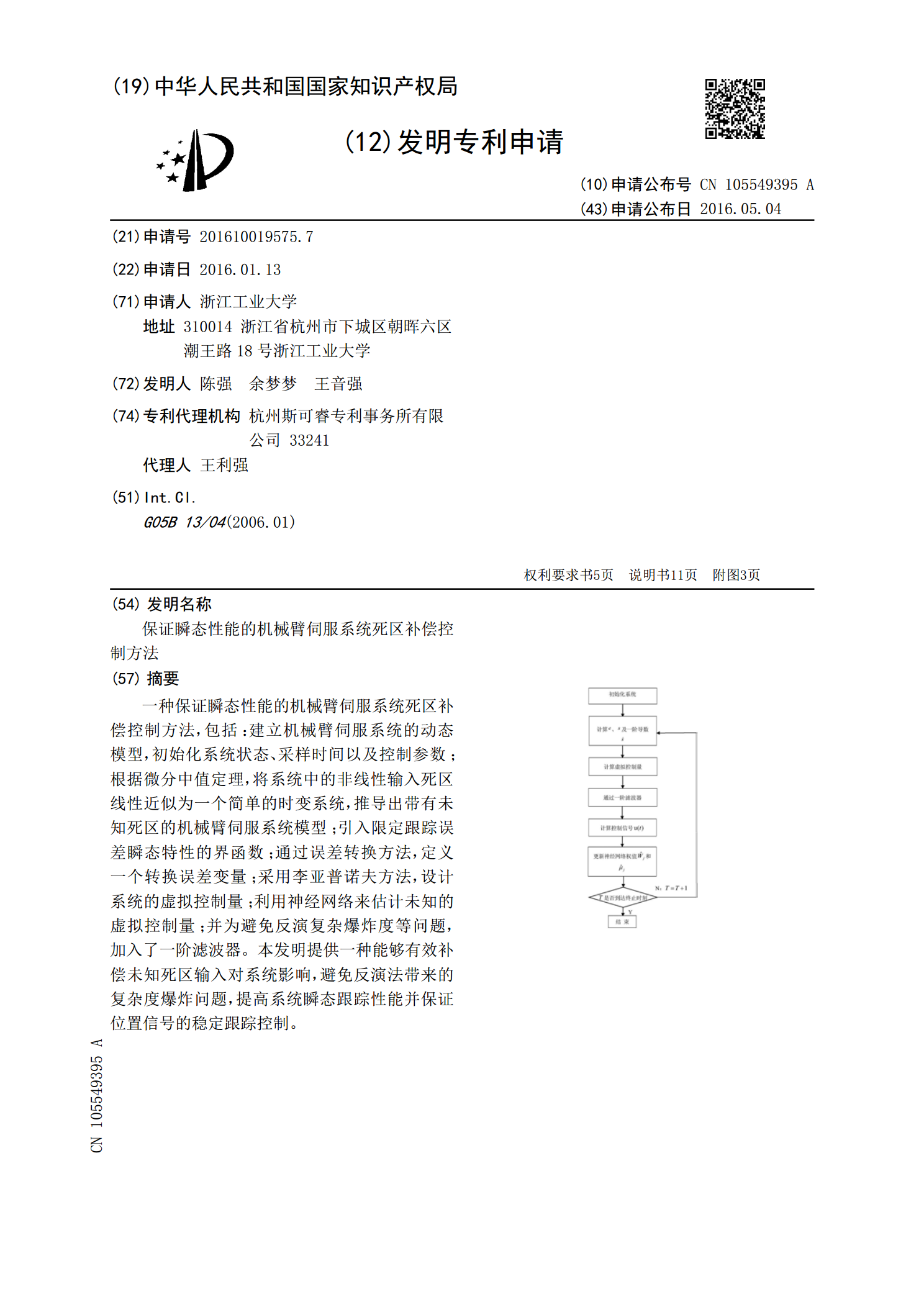
一种保证瞬态性能的机械臂伺服系统死区补偿控制方法,包括:建立机械臂伺服系统的动态模型,初始化系统状态、采样时间以及控制参数;根据微分中值定理,将系统中的非线性输入死区线性近似为一个简单的时变系统,推导出带有未知死区的机械臂伺服系统模型;引入限定跟踪误差瞬态特性的界函数;通过误差转换方法,定义一个转换误差变量;采用李亚普诺夫方法,设计系统的虚拟控制量;利用神经网络来估计未知的虚拟控制量;并为避免反演复杂爆炸度等问题,加入了一阶滤波器。本发明提供一种能够有效补偿未知死区输入对系统影响,避免反演法带来的复杂度爆

一种基于SVPWM的死区补偿算法的研究.docx
一种基于SVPWM的死区补偿算法的研究摘要:本文介绍了一种基于SVPWM(空间向量脉宽调制)的死区补偿算法。该算法能够在PWM(脉宽调制)控制时有效解决死区问题,提高PWM的控制精度和效率。在该算法中,通过比较输出电压和电网电压的大小,实现了对死区的实时监测,并对死区进行了自适应修正。同时,为了验证该算法的性能,进行了仿真实验和实际应用测试,结果表明,该算法能够有效提高PWM的控制精度和效率。关键词:SVPWM;死区补偿;PWM;控制精度;效率一、引言现代电力系统中,PWM控制技术已经成为了电力电子器件最

基于扰动电压观测器的死区补偿算法.docx
基于扰动电压观测器的死区补偿算法基于扰动电压观测器的死区补偿算法摘要:在控制系统中,死区现象是一种常见的非线性特性,它会引起系统的不稳定和性能下降。为了解决这一问题,本文提出了一种基于扰动电压观测器的死区补偿算法。该算法通过引入扰动电压观测器来估计死区的扰动信号,并通过补偿器来抵消死区引起的非线性效应。通过理论分析和仿真验证,我们发现该算法能够有效地改善系统的稳定性和性能。关键词:死区补偿,扰动电压观测器,非线性特性,稳定性,性能引言在许多控制系统中,可能存在一定的输入输出死区,死区是指在输入变量之间存在

基于深度强化学习的机械臂抓取与码垛算法研究的开题报告.docx
基于深度强化学习的机械臂抓取与码垛算法研究的开题报告一、研究背景随着工业自动化程度的不断提高,机器人技术已经越来越广泛地应用于生产和制造领域。而机械臂作为一种重要的工业机器人,广泛应用于物流、制造、医疗等领域。在实际生产中,机械臂在进行抓取和码垛操作时,需要针对物体的形状、大小、位置、姿态等进行精准的操作,这对机械臂的控制精度和抓取算法提出了更高的要求。深度学习技术发展迅速,为机器人技术带来了新的突破,尤其是基于深度强化学习的机械臂抓取和码垛算法,通过学习强化信号,实现了机器人自主学习和智能控制。随着深度