
水下自主对接无线充电平台及水下机器人.pdf

高格****gu

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
水下自主对接无线充电平台及水下机器人.pdf
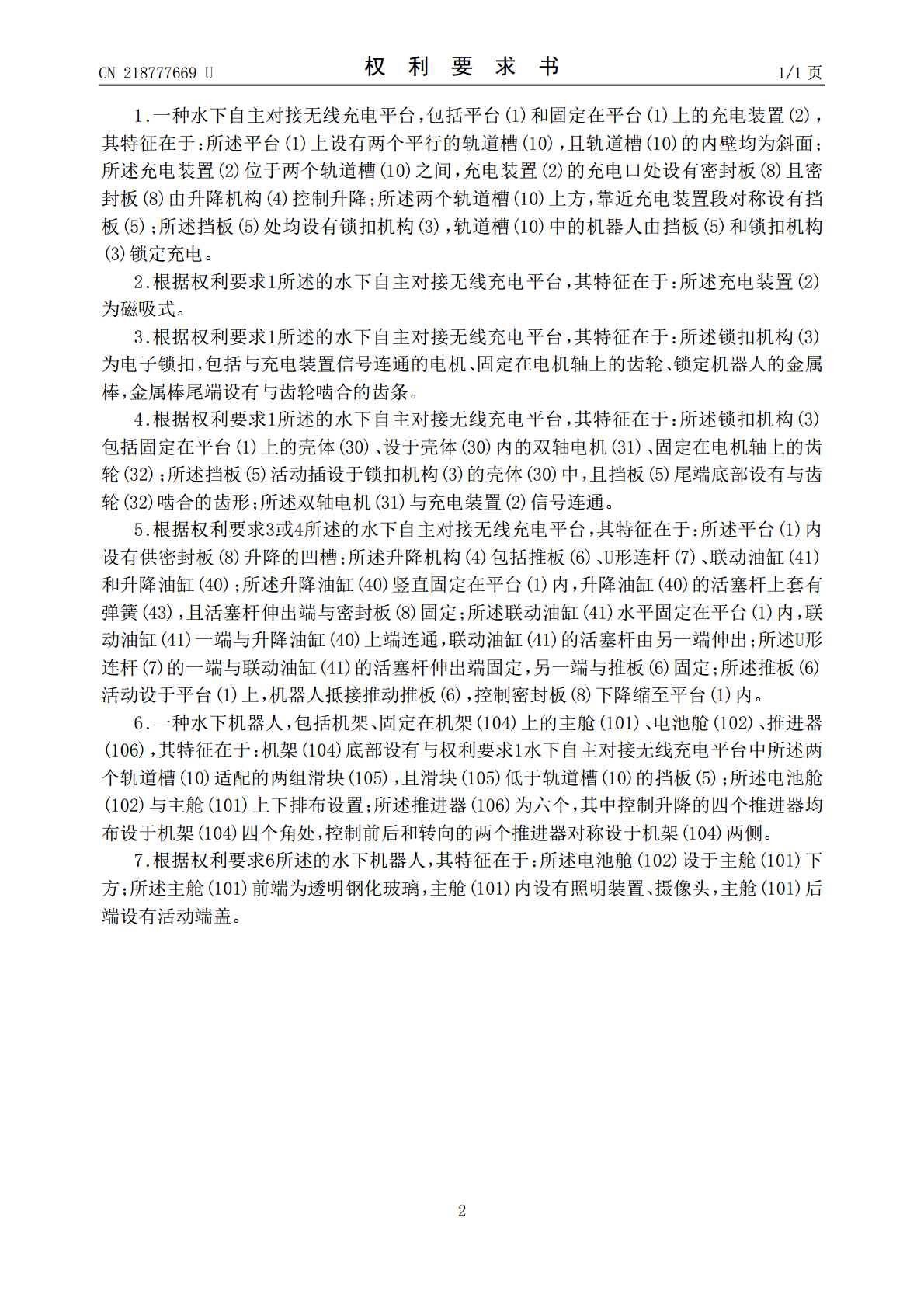
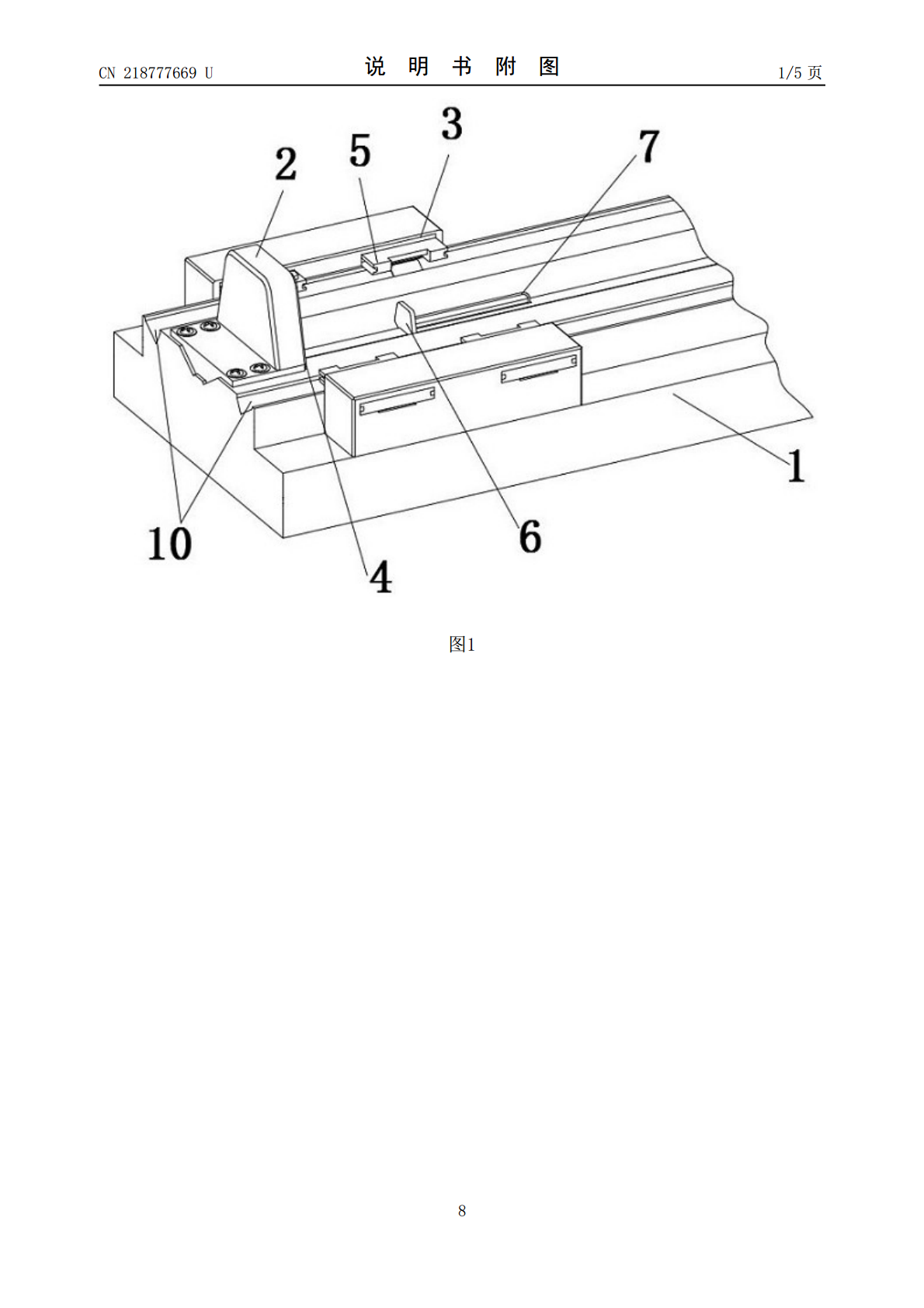
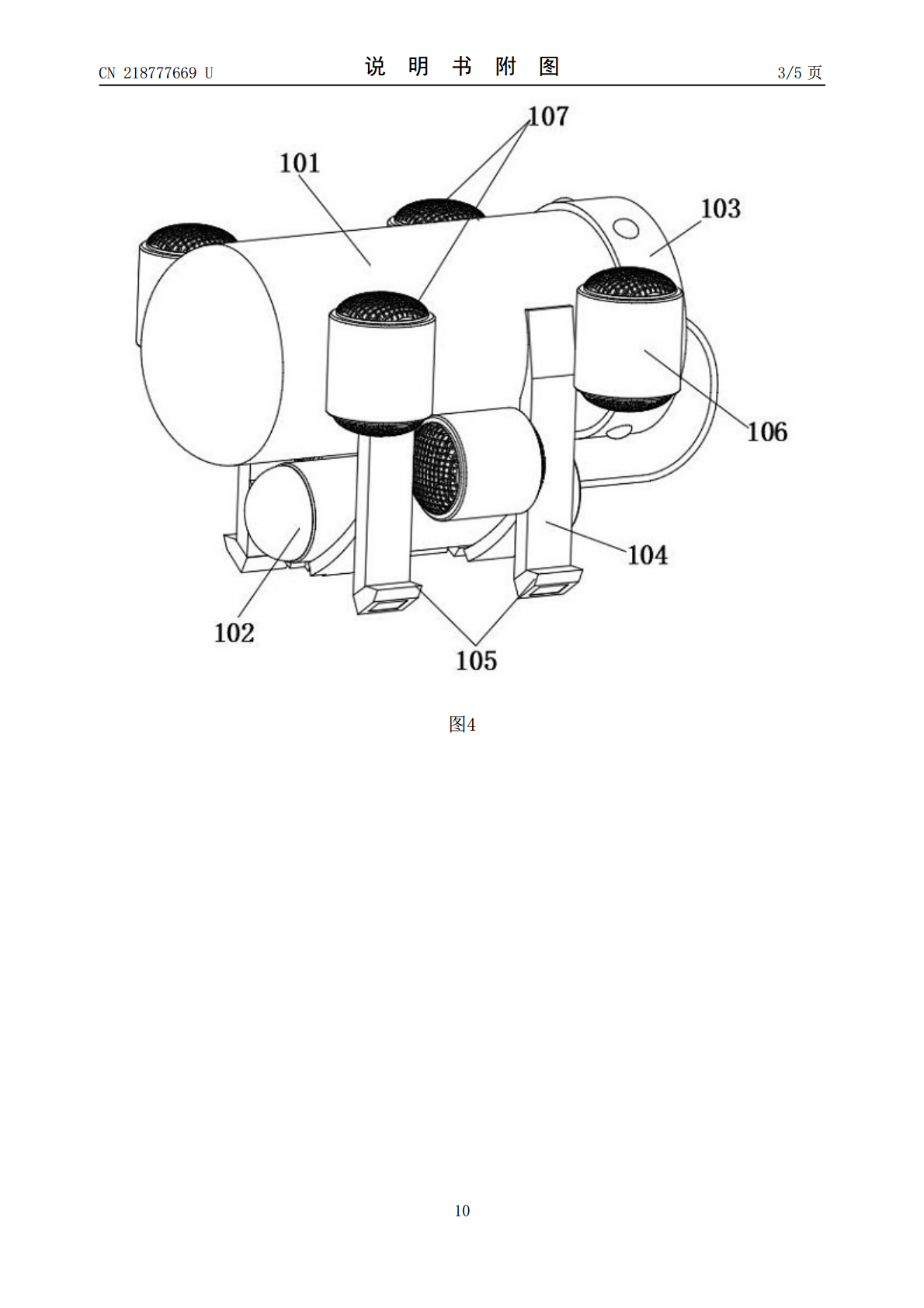
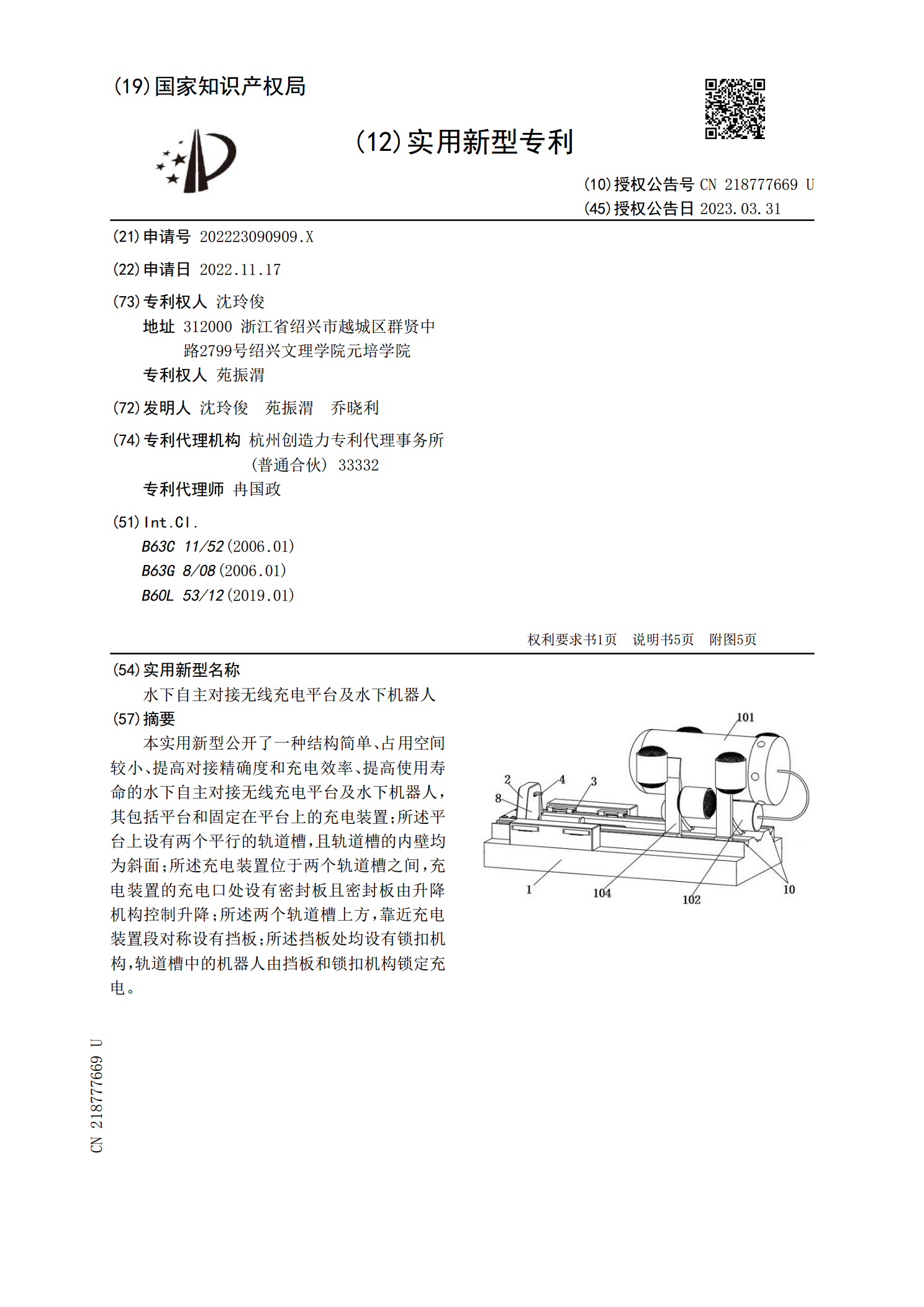
本实用新型公开了一种结构简单、占用空间较小、提高对接精确度和充电效率、提高使用寿命的水下自主对接无线充电平台及水下机器人,其包括平台和固定在平台上的充电装置;所述平台上设有两个平行的轨道槽,且轨道槽的内壁均为斜面;所述充电装置位于两个轨道槽之间,充电装置的充电口处设有密封板且密封板由升降机构控制升降;所述两个轨道槽上方,靠近充电装置段对称设有挡板;所述挡板处均设有锁扣机构,轨道槽中的机器人由挡板和锁扣机构锁定充电。
自主水下航行器及其对接装置.pdf
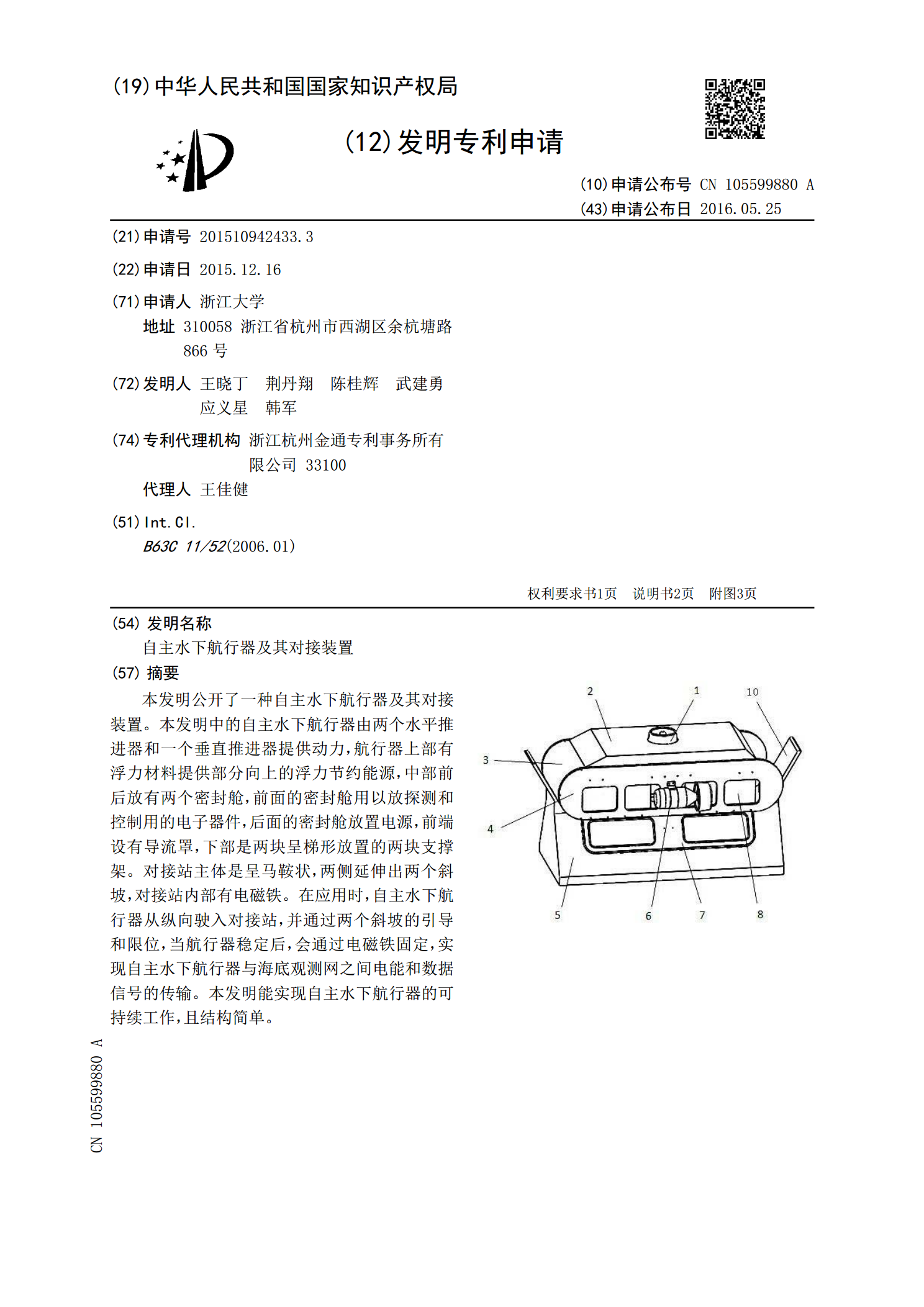
本发明公开了一种自主水下航行器及其对接装置。本发明中的自主水下航行器由两个水平推进器和一个垂直推进器提供动力,航行器上部有浮力材料提供部分向上的浮力节约能源,中部前后放有两个密封舱,前面的密封舱用以放探测和控制用的电子器件,后面的密封舱放置电源,前端设有导流罩,下部是两块呈梯形放置的两块支撑架。对接站主体是呈马鞍状,两侧延伸出两个斜坡,对接站内部有电磁铁。在应用时,自主水下航行器从纵向驶入对接站,并通过两个斜坡的引导和限位,当航行器稳定后,会通过电磁铁固定,实现自主水下航行器与海底观测网之间电能和数据信号
一种自主水下航行器用舱体装配与对接平台.pdf
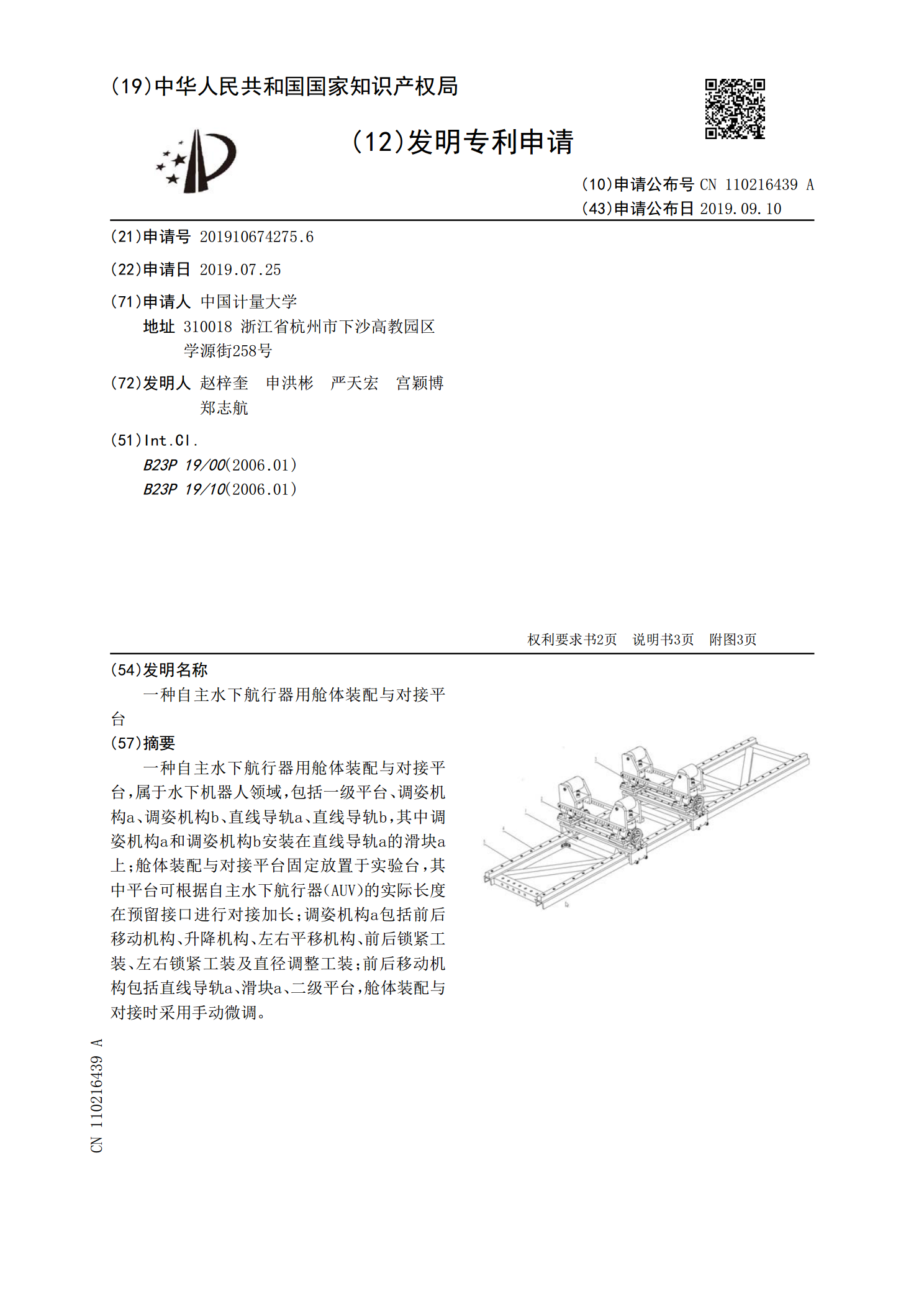
一种自主水下航行器用舱体装配与对接平台,属于水下机器人领域,包括一级平台、调姿机构a、调姿机构b、直线导轨a、直线导轨b,其中调姿机构a和调姿机构b安装在直线导轨a的滑块a上;舱体装配与对接平台固定放置于实验台,其中平台可根据自主水下航行器(AUV)的实际长度在预留接口进行对接加长;调姿机构a包括前后移动机构、升降机构、左右平移机构、前后锁紧工装、左右锁紧工装及直径调整工装;前后移动机构包括直线导轨a、滑块a、二级平台,舱体装配与对接时采用手动微调。
一种水下双向无线充电系统.pdf
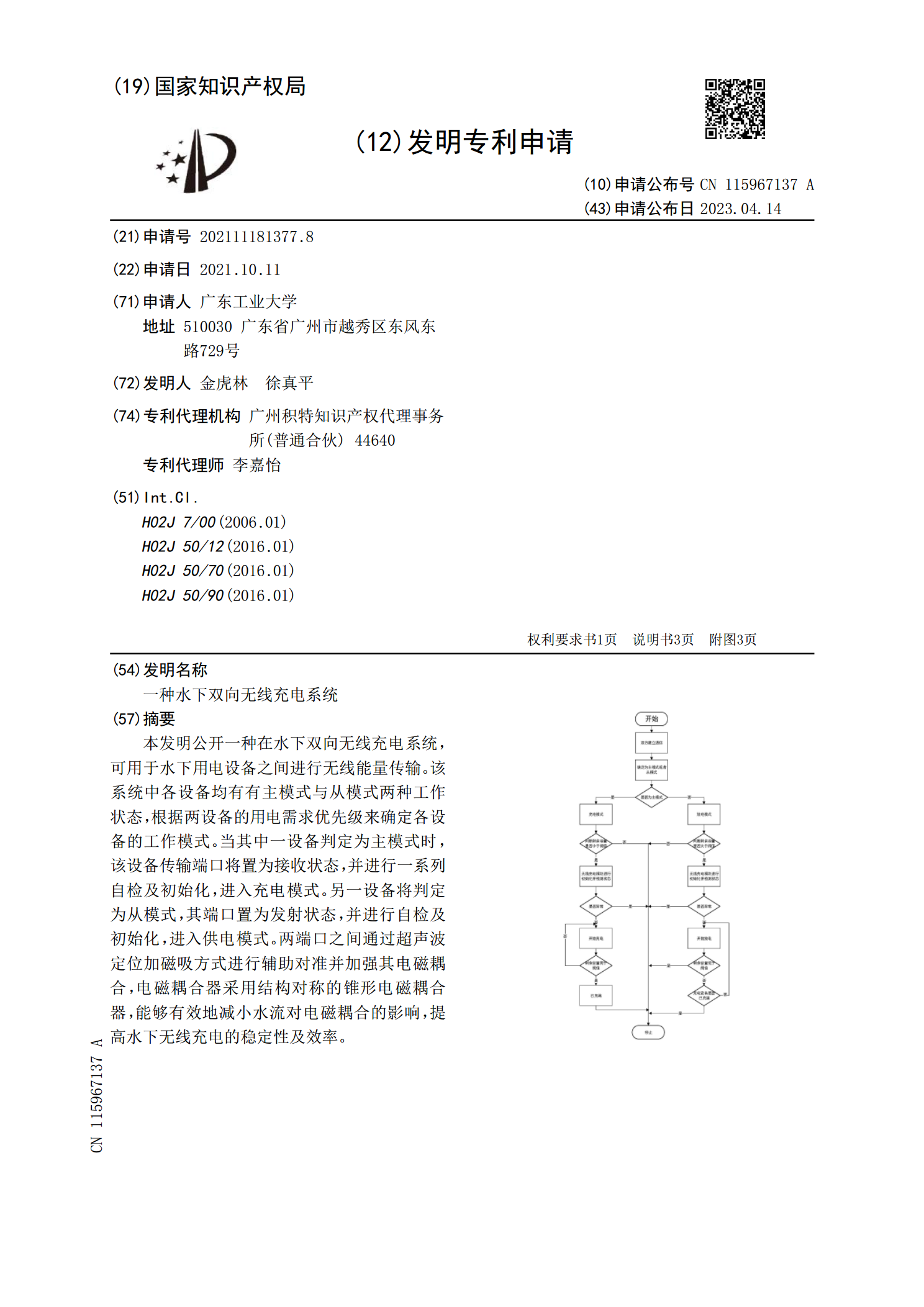
本发明公开一种在水下双向无线充电系统,可用于水下用电设备之间进行无线能量传输。该系统中各设备均有有主模式与从模式两种工作状态,根据两设备的用电需求优先级来确定各设备的工作模式。当其中一设备判定为主模式时,该设备传输端口将置为接收状态,并进行一系列自检及初始化,进入充电模式。另一设备将判定为从模式,其端口置为发射状态,并进行自检及初始化,进入供电模式。两端口之间通过超声波定位加磁吸方式进行辅助对准并加强其电磁耦合,电磁耦合器采用结构对称的锥形电磁耦合器,能够有效地减小水流对电磁耦合的影响,提高水下无线充电的
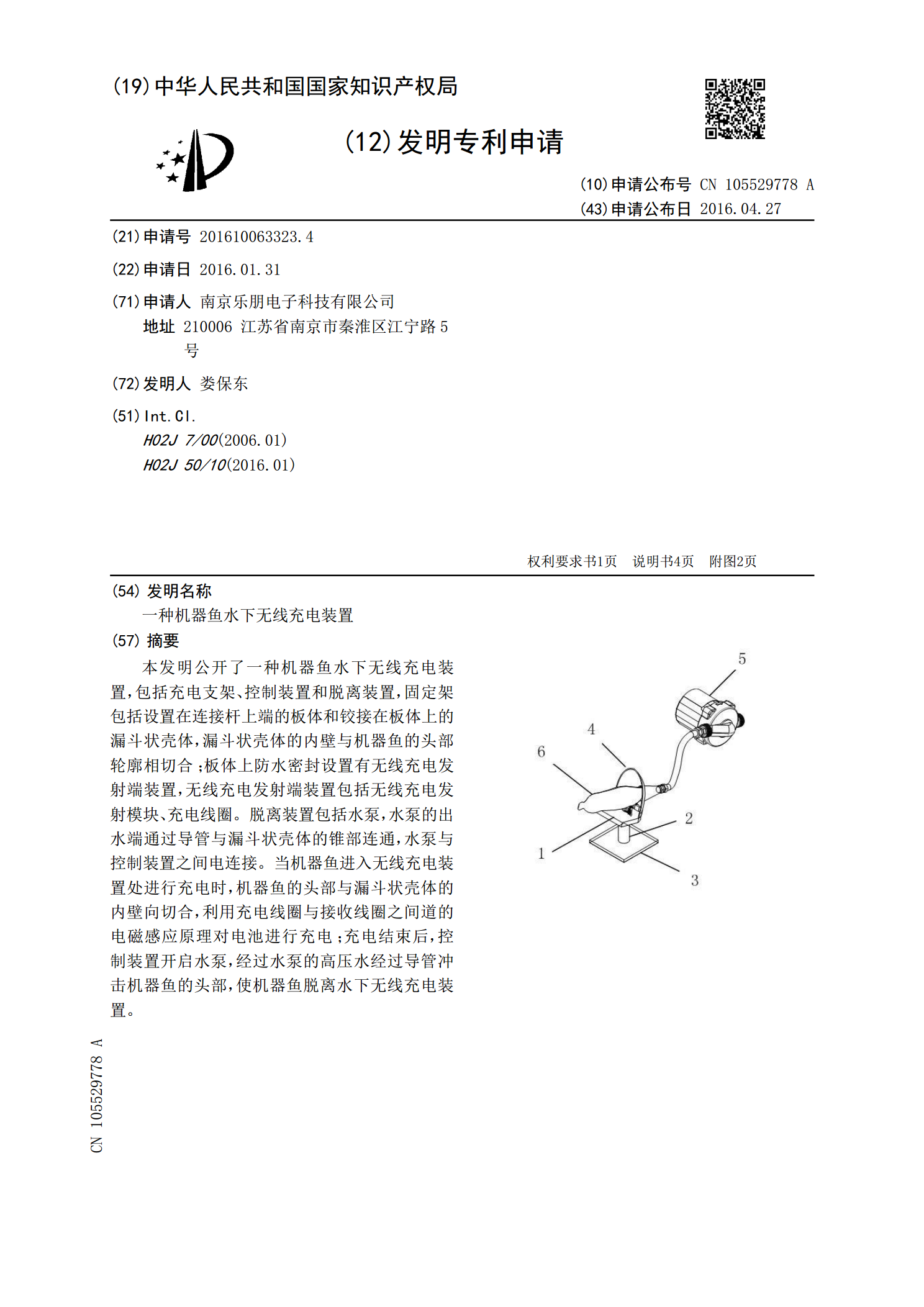
一种机器鱼水下无线充电装置.pdf
本发明公开了一种机器鱼水下无线充电装置,包括充电支架、控制装置和脱离装置,固定架包括设置在连接杆上端的板体和铰接在板体上的漏斗状壳体,漏斗状壳体的内壁与机器鱼的头部轮廓相切合;板体上防水密封设置有无线充电发射端装置,无线充电发射端装置包括无线充电发射模块、充电线圈。脱离装置包括水泵,水泵的出水端通过导管与漏斗状壳体的锥部连通,水泵与控制装置之间电连接。当机器鱼进入无线充电装置处进行充电时,机器鱼的头部与漏斗状壳体的内壁向切合,利用充电线圈与接收线圈之间道的电磁感应原理对电池进行充电;充电结束后,控制装置开