
一种调节阀在线自整定粘滞补偿方法.pdf

书生****12


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种调节阀在线自整定粘滞补偿方法.pdf
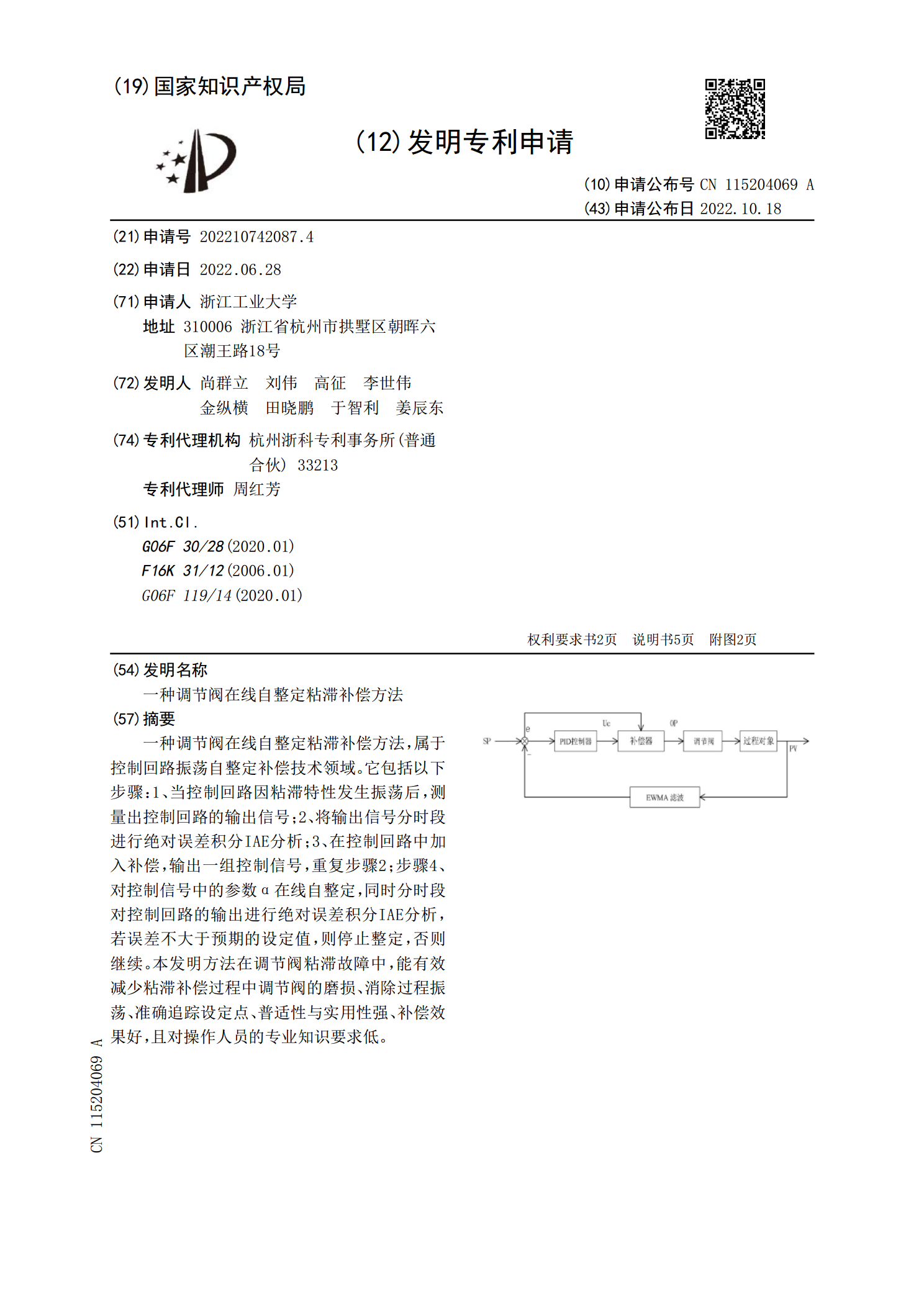
一种调节阀在线自整定粘滞补偿方法,属于控制回路振荡自整定补偿技术领域。它包括以下步骤:1、当控制回路因粘滞特性发生振荡后,测量出控制回路的输出信号;2、将输出信号分时段进行绝对误差积分IAE分析;3、在控制回路中加入补偿,输出一组控制信号,重复步骤2;步骤4、对控制信号中的参数α在线自整定,同时分时段对控制回路的输出进行绝对误差积分IAE分析,若误差不大于预期的设定值,则停止整定,否则继续。本发明方法在调节阀粘滞故障中,能有效减少粘滞补偿过程中调节阀的磨损、消除过程振荡、准确追踪设定点、普适性与实用性强、

一种电机磁偏角的在线自整定方法及系统.pdf
本发明公开了一种电机磁偏角的在线自整定方法及系统,所述方法包括如下步骤:步骤S1,在给定电流合成矢量参考下,给定与时间线性的旋转磁偏角补偿,在电流环矢量闭环控制下得到d‑q旋转坐标系中

基于逆模型的调节阀粘滞补偿.docx
基于逆模型的调节阀粘滞补偿在工业自动化领域中,调节阀是控制流体流动量的重要设备。然而,在流体传输过程中,由于摩擦和流体黏度,会对调节阀的精度和稳定性产生不利影响。因此,为了提升调节阀的控制精度和稳定性,经常需要对其进行各种补偿措施。其中,粘滞补偿是一种常见的补偿方式。本文将介绍基于逆模型的调节阀粘滞补偿的相关内容。一、调节阀的粘滞性问题在真实的工业场景中,调节阀所控制的流体通常具有一定的黏度,这意味着在调节阀开度变化的过程中,会产生摩擦力和黏滞阻力等因素的影响,从而对流体流量控制产生干扰。这些因素的影响常
一种带有PID转角补偿的参数自整定LQR路径跟踪方法.pdf
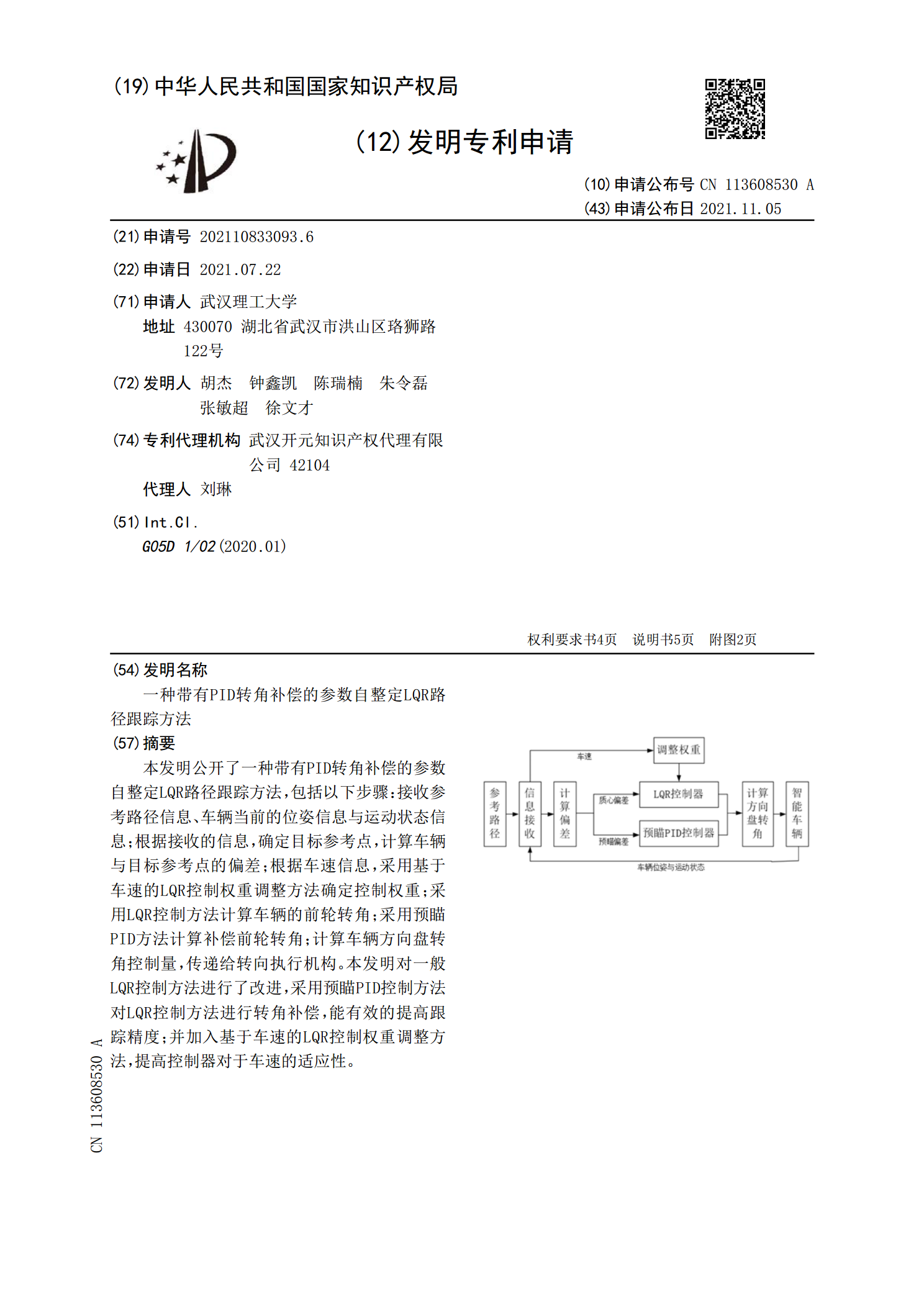
本发明公开了一种带有PID转角补偿的参数自整定LQR路径跟踪方法,包括以下步骤:接收参考路径信息、车辆当前的位姿信息与运动状态信息;根据接收的信息,确定目标参考点,计算车辆与目标参考点的偏差;根据车速信息,采用基于车速的LQR控制权重调整方法确定控制权重;采用LQR控制方法计算车辆的前轮转角;采用预瞄PID方法计算补偿前轮转角;计算车辆方向盘转角控制量,传递给转向执行机构。本发明对一般LQR控制方法进行了改进,采用预瞄PID控制方法对LQR控制方法进行转角补偿,能有效的提高跟踪精度;并加入基于车速的LQR

一种新的PID参数自整定方法.docx
一种新的PID参数自整定方法标题:基于增量模型的自整定PID参数优化方法研究摘要:PID控制器是工业过程控制中最常用的一种控制器,它通过分析误差、误差变化率和误差积分来生成控制信号。但是,在实际应用中,PID控制器的参数调节通常需要根据具体的系统特性进行手动调整,这个过程需要耗费大量的时间和精力。为了简化调参过程,提高系统的控制质量和稳定性,本文提出了一种基于增量模型的自整定PID参数优化方法。1.引言PID控制器是一种宽泛应用在工业控制领域的经典控制算法。其具有结构简单、参数易于调节的优势,但是手动调节