
基于逆模型的调节阀粘滞补偿.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于逆模型的调节阀粘滞补偿.docx
基于逆模型的调节阀粘滞补偿在工业自动化领域中,调节阀是控制流体流动量的重要设备。然而,在流体传输过程中,由于摩擦和流体黏度,会对调节阀的精度和稳定性产生不利影响。因此,为了提升调节阀的控制精度和稳定性,经常需要对其进行各种补偿措施。其中,粘滞补偿是一种常见的补偿方式。本文将介绍基于逆模型的调节阀粘滞补偿的相关内容。一、调节阀的粘滞性问题在真实的工业场景中,调节阀所控制的流体通常具有一定的黏度,这意味着在调节阀开度变化的过程中,会产生摩擦力和黏滞阻力等因素的影响,从而对流体流量控制产生干扰。这些因素的影响常
一种调节阀在线自整定粘滞补偿方法.pdf
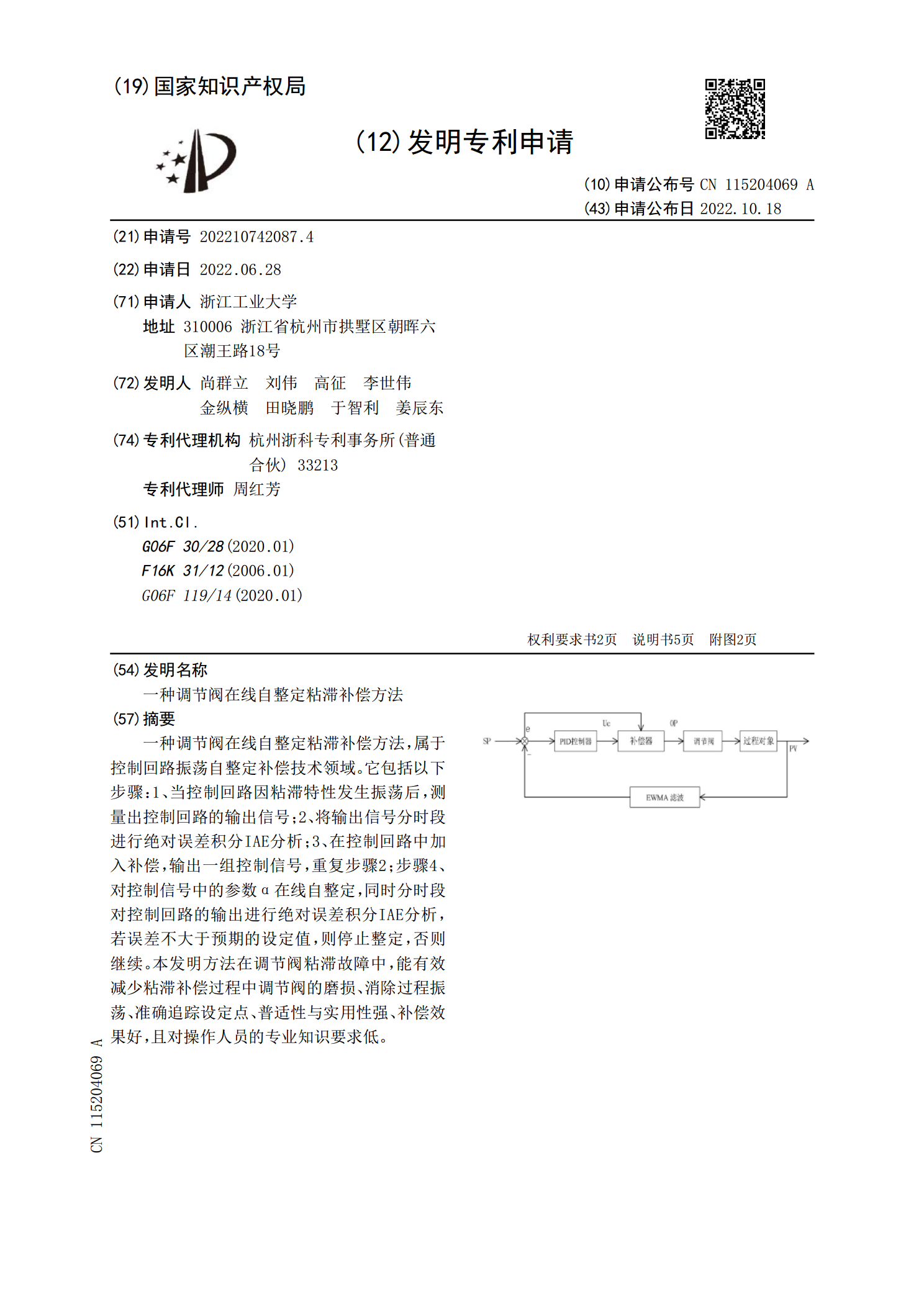
一种调节阀在线自整定粘滞补偿方法,属于控制回路振荡自整定补偿技术领域。它包括以下步骤:1、当控制回路因粘滞特性发生振荡后,测量出控制回路的输出信号;2、将输出信号分时段进行绝对误差积分IAE分析;3、在控制回路中加入补偿,输出一组控制信号,重复步骤2;步骤4、对控制信号中的参数α在线自整定,同时分时段对控制回路的输出进行绝对误差积分IAE分析,若误差不大于预期的设定值,则停止整定,否则继续。本发明方法在调节阀粘滞故障中,能有效减少粘滞补偿过程中调节阀的磨损、消除过程振荡、准确追踪设定点、普适性与实用性强、

基于扩展Hammerstein系统辨识的调节阀粘滞建模.docx
基于扩展Hammerstein系统辨识的调节阀粘滞建模调节阀是化工、石油、能源等行业中常见的控制元件,通常用于调节流体或气体的流量、压力和温度等参数。由于其粘滞效应的存在,调节阀在控制系统中会产生一定的影响,难以实现准确的控制和稳定的工艺过程。因此,针对调节阀的粘滞建模研究显得尤为重要。本文将采用扩展Hammerstein系统辨识的方法,对调节阀的粘滞建模进行研究。一、扩展Hammerstein系统辨识Hammerstein系统是一种由线性动态系统和非线性静态系统组成的复合系统,通常用于描述非线性系统的输

基于逆模型辨识的Wiener型传感器动态补偿研究.docx
基于逆模型辨识的Wiener型传感器动态补偿研究基于逆模型辨识的Wiener型传感器动态补偿研究摘要:Wiener型传感器广泛应用于各种领域的控制系统中,为了提高传感器的性能,动态补偿方法被广泛研究。本文以逆模型辨识为基础,研究了Wiener型传感器的动态补偿方法。首先,介绍了Wiener型传感器的结构和特点;然后,详细阐述了逆模型辨识的原理和方法;接着,提出了基于逆模型辨识的Wiener型传感器动态补偿方法,并进行了仿真实验验证。结果表明,所提方法能够有效补偿Wiener型传感器的动态特性,提高系统的性

基于Preisach逆模型的压电陶瓷执行器迟滞补偿控制.docx
基于Preisach逆模型的压电陶瓷执行器迟滞补偿控制基于Preisach逆模型的压电陶瓷执行器迟滞补偿控制摘要:压电陶瓷材料因其快速响应、高精度、高可靠性等优点,被广泛应用于微位移执行器、精密定位系统等领域。然而,压电陶瓷材料的固有迟滞性会对其控制性能产生不利影响。本文针对压电陶瓷执行器的迟滞问题,提出了一种基于Preisach逆模型的迟滞补偿控制方法。该方法通过建立和训练Preisach逆模型,实现对压电陶瓷的迟滞特性进行补偿,提高其控制性能。实验结果表明,该方法能够有效降低压电陶瓷执行器的迟滞影响,