
一种非连续圆柱式自动驾驶汽车激光雷达振镜设计方法.pdf

慧娇****文章

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种非连续圆柱式自动驾驶汽车激光雷达振镜设计方法.pdf
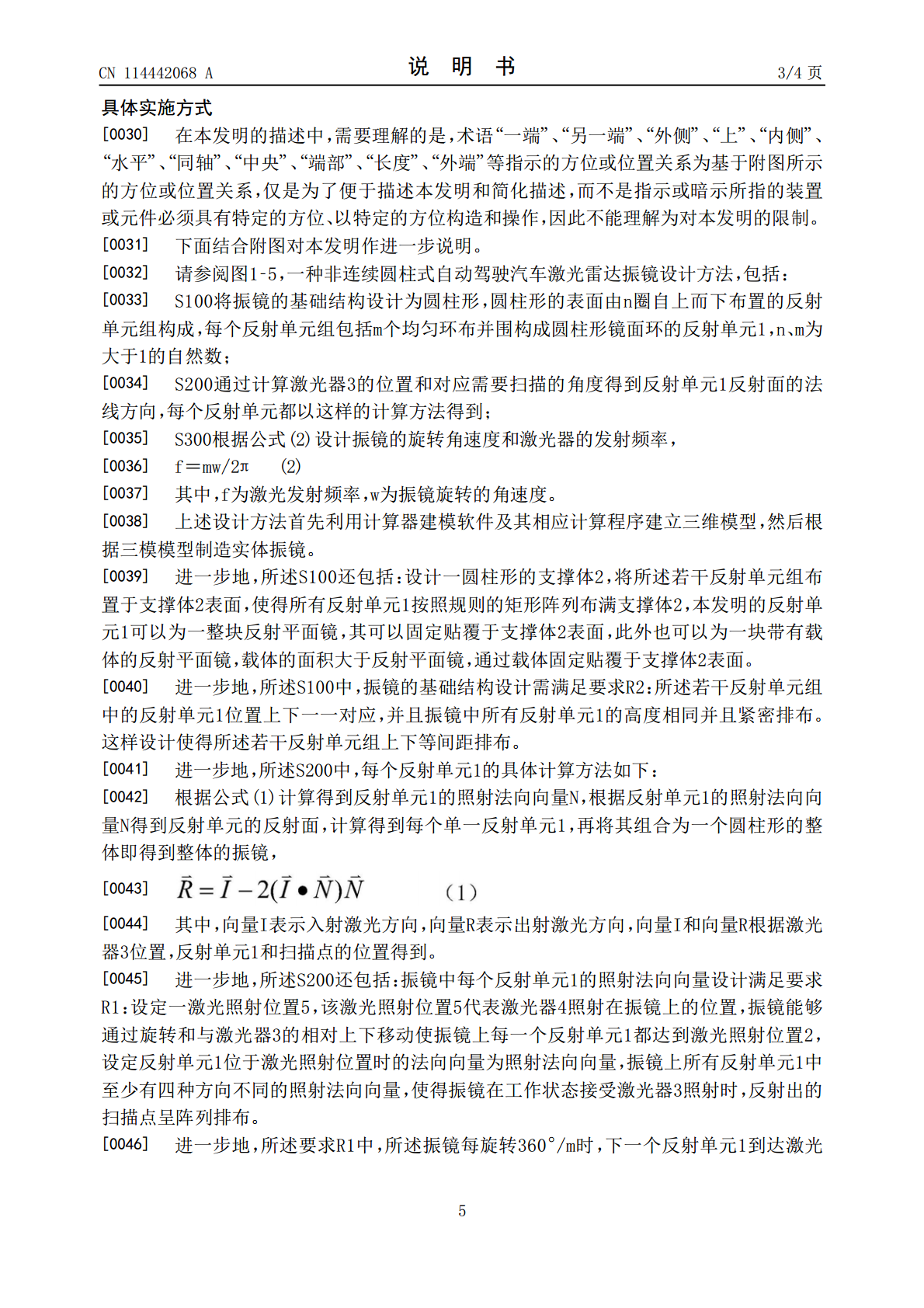
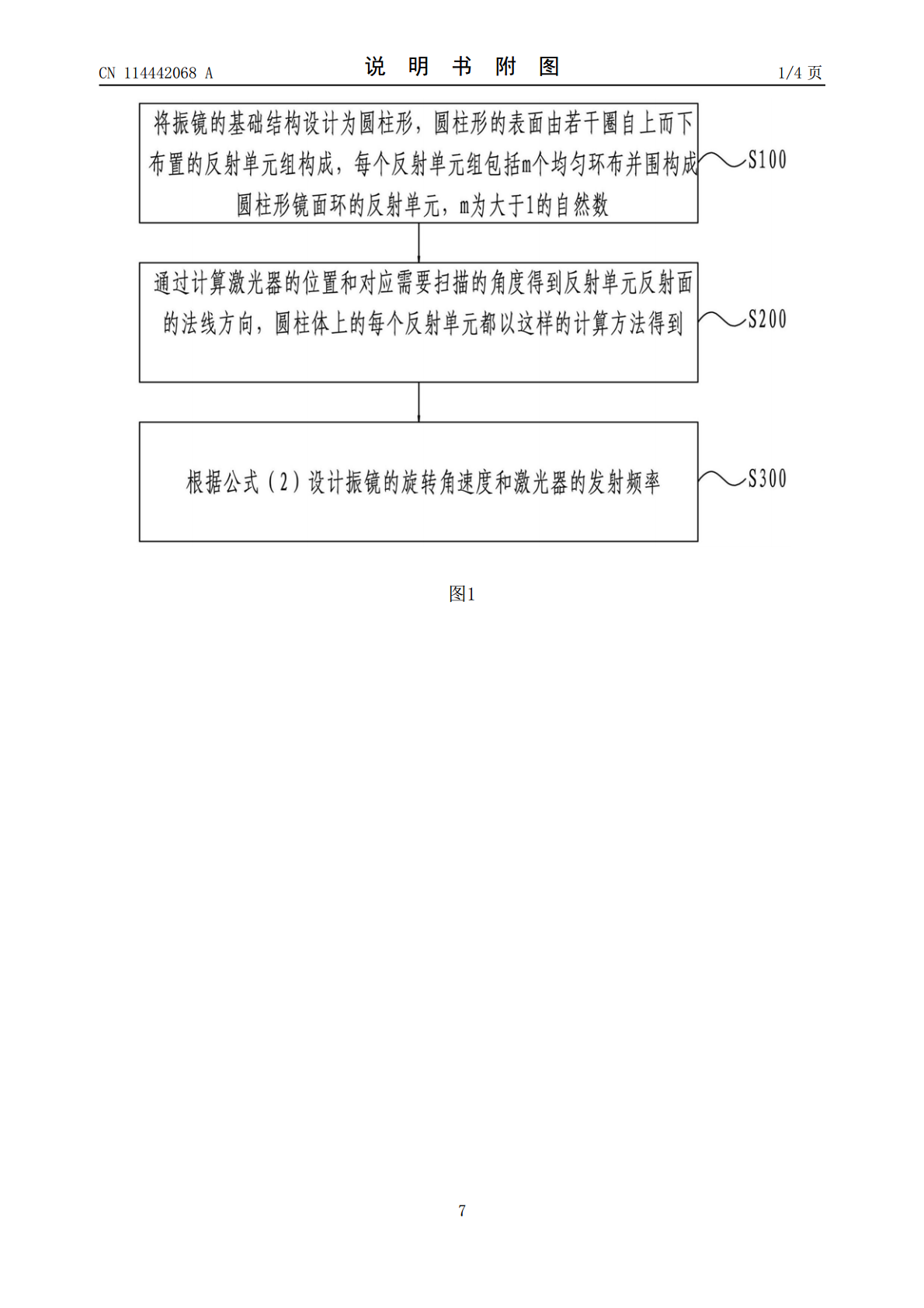
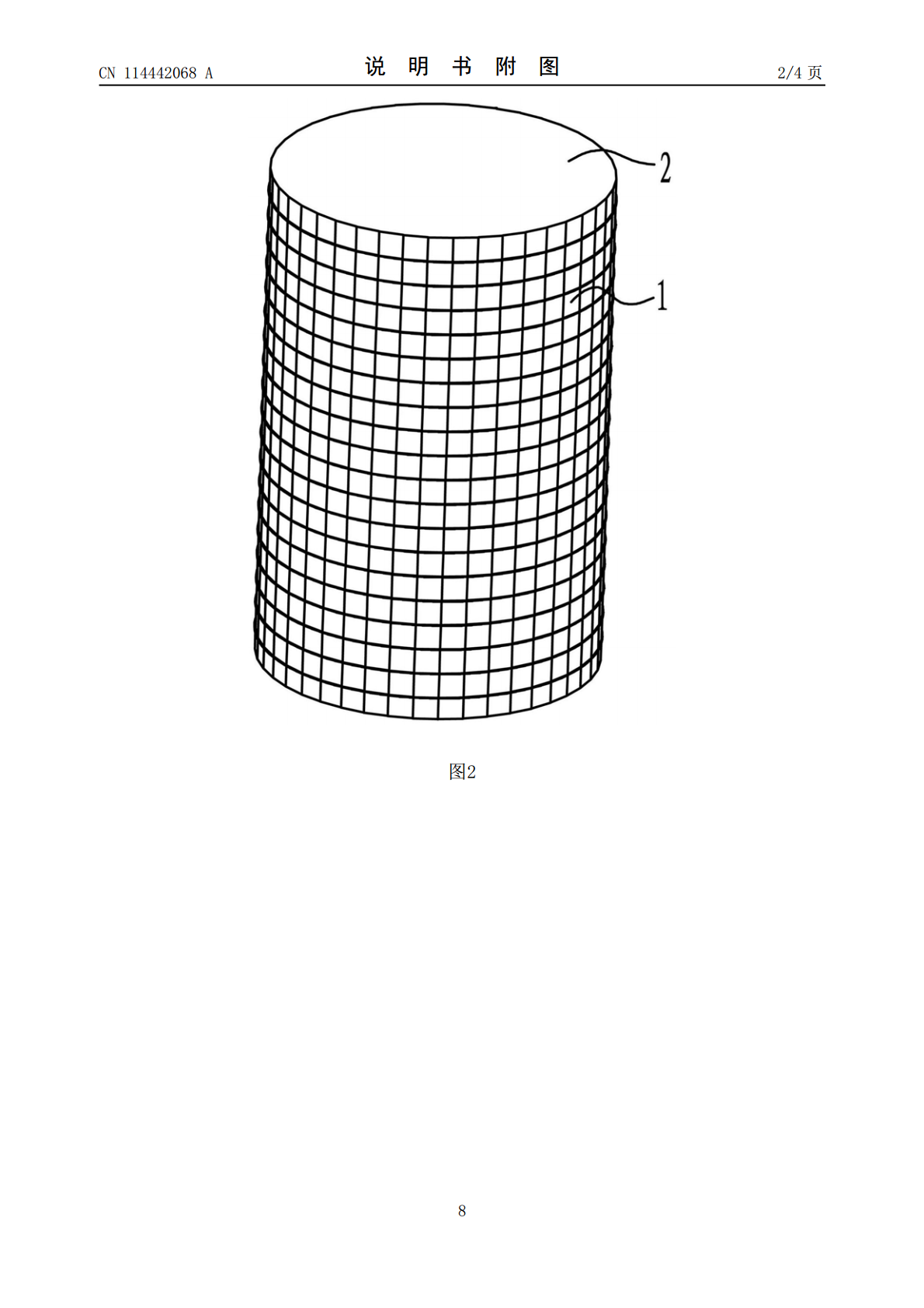
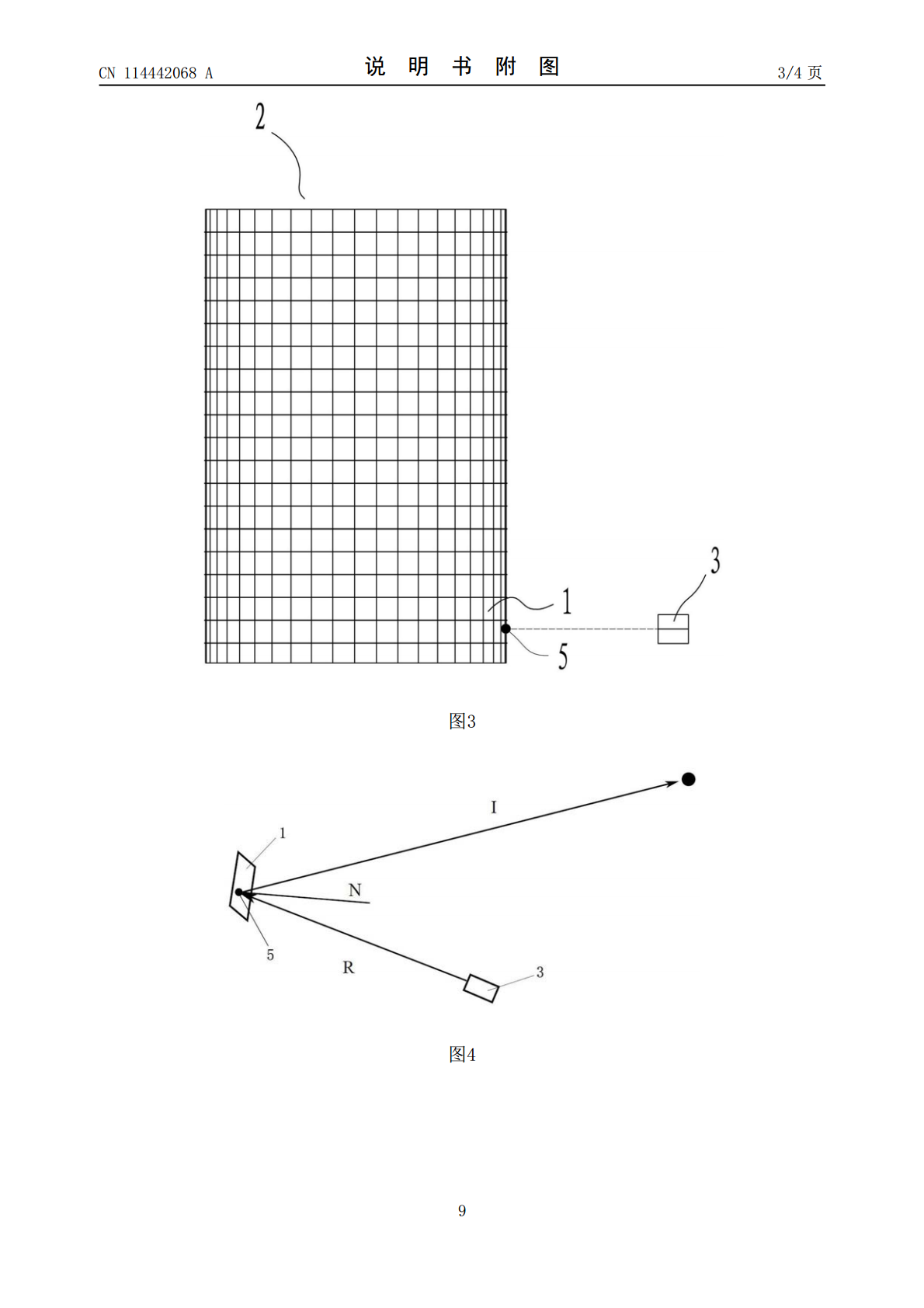
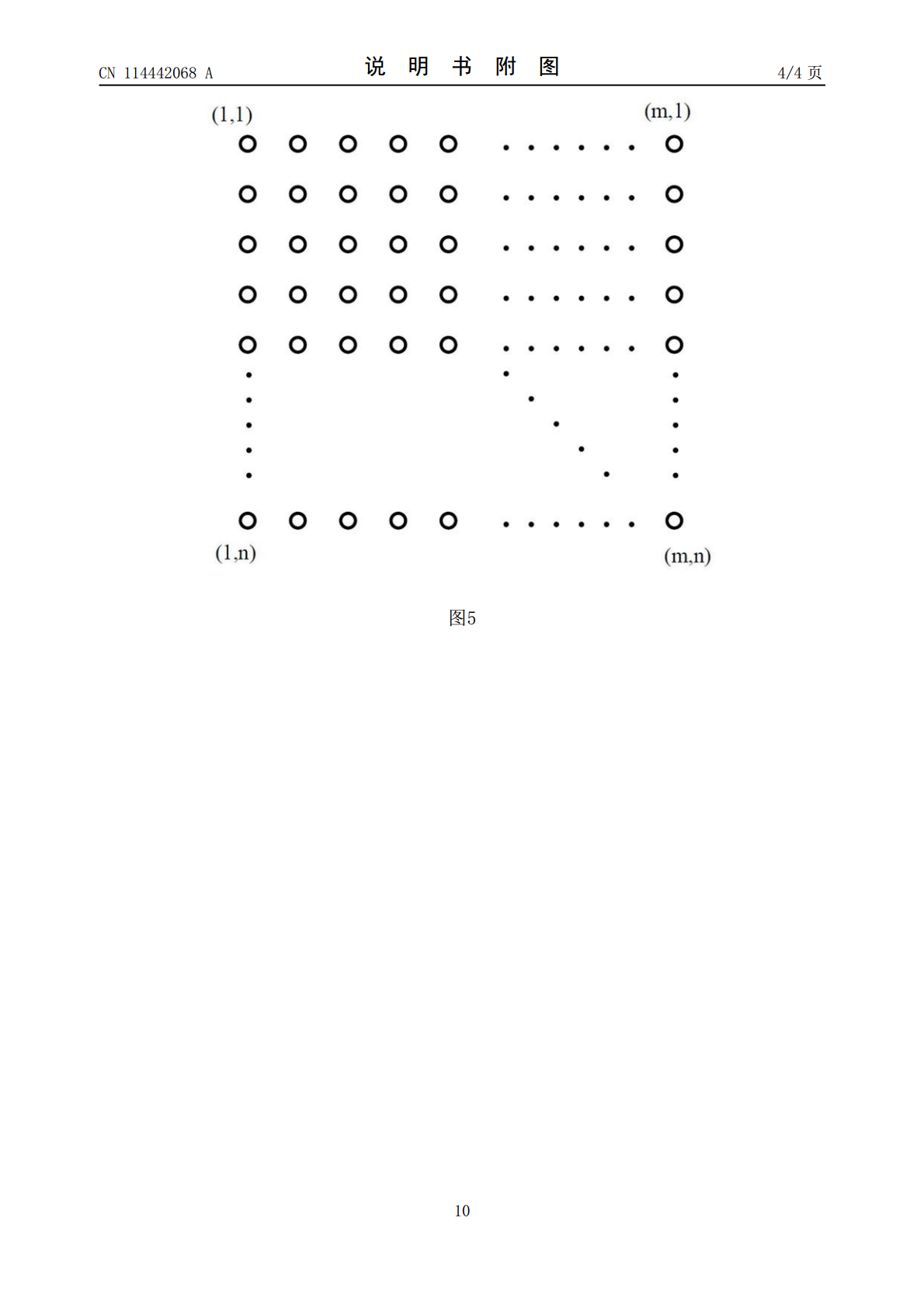
本发明属于激光扫描领域,具体涉及一种非连续圆柱式自动驾驶汽车激光雷达振镜设计方法,包括:将振镜的基础结构设计为圆柱形,圆柱形的表面由若干圈自上而下布置的反射单元组构成,每个反射单元组包括m个均匀环布并围构成圆柱形镜面环的反射单元,m为大于1的自然数;通过计算激光器的位置和对应需要扫描的角度得到反射单元反射面的法线方向,每个反射单元都以这样的计算方法得到。本发明能够对振镜中每个反射单元都单独进行设计,这样就解决了传统振镜扫描变形的问题。
非连续圆柱式自动驾驶汽车激光雷达振镜及其旋转机构.pdf
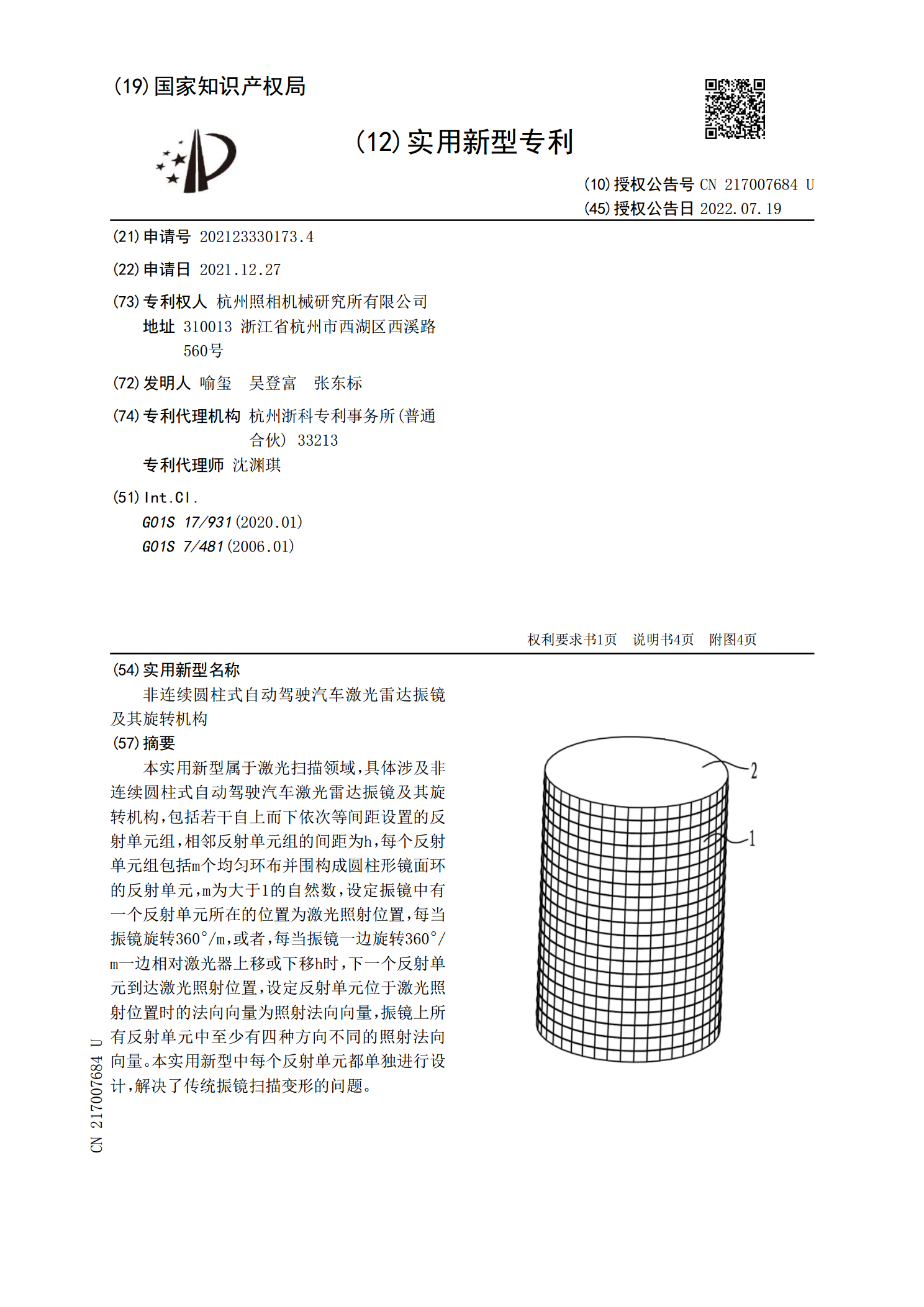
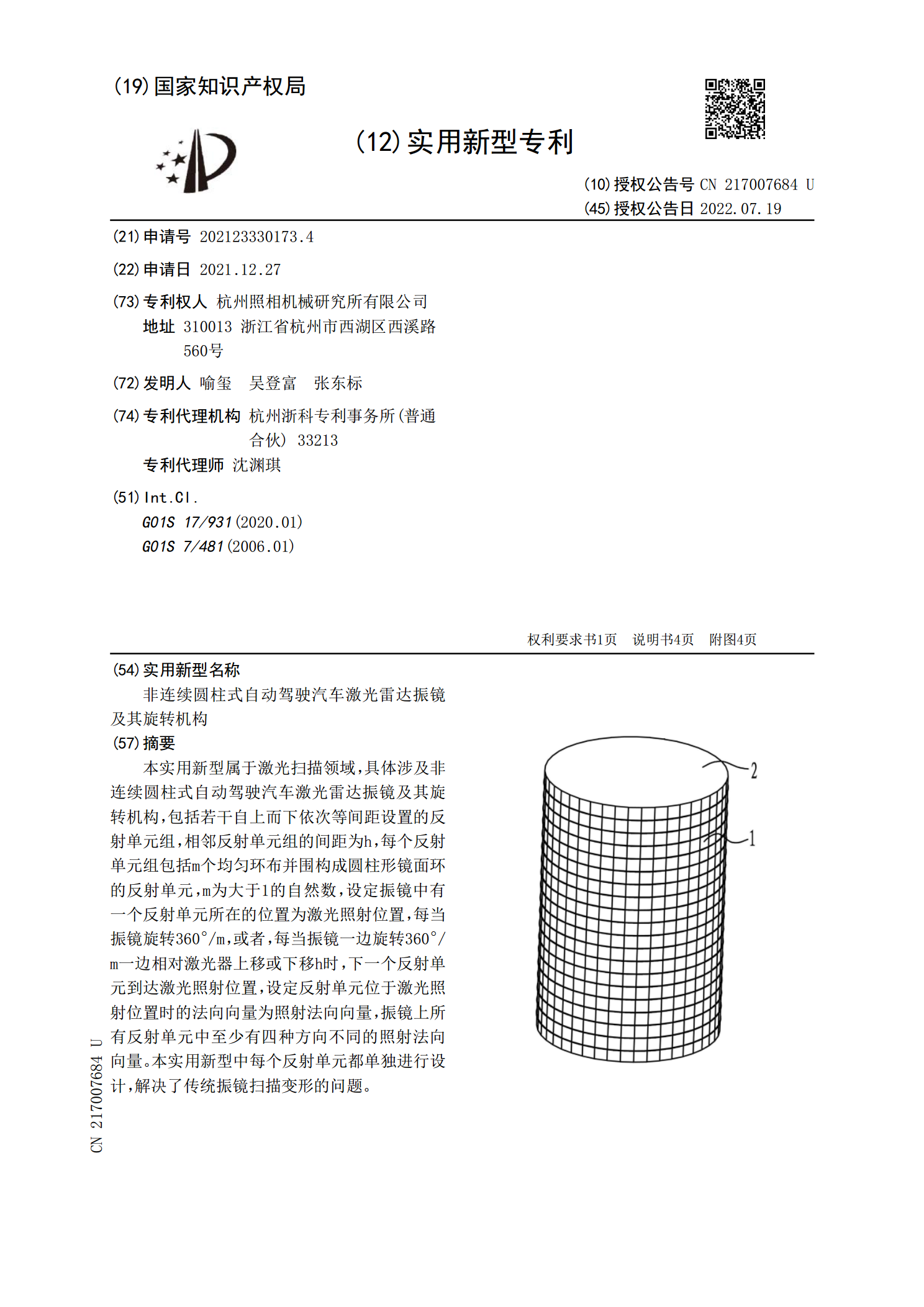
本实用新型属于激光扫描领域,具体涉及非连续圆柱式自动驾驶汽车激光雷达振镜及其旋转机构,包括若干自上而下依次等间距设置的反射单元组,相邻反射单元组的间距为h,每个反射单元组包括m个均匀环布并围构成圆柱形镜面环的反射单元,m为大于1的自然数,设定振镜中有一个反射单元所在的位置为激光照射位置,每当振镜旋转360°/m,或者,每当振镜一边旋转360°/m一边相对激光器上移或下移h时,下一个反射单元到达激光照射位置,设定反射单元位于激光照射位置时的法向向量为照射法向向量,振镜上所有反射单元中至少有四种方向不同的照射
非连续圆柱式自动驾驶汽车激光雷达振镜及其旋转机构.pdf
本实用新型属于激光扫描领域,具体涉及非连续圆柱式自动驾驶汽车激光雷达振镜及其旋转机构,包括若干自上而下依次等间距设置的反射单元组,相邻反射单元组的间距为h,每个反射单元组包括m个均匀环布并围构成圆柱形镜面环的反射单元,m为大于1的自然数,设定振镜中有一个反射单元所在的位置为激光照射位置,每当振镜旋转360°/m,或者,每当振镜一边旋转360°/m一边相对激光器上移或下移h时,下一个反射单元到达激光照射位置,设定反射单元位于激光照射位置时的法向向量为照射法向向量,振镜上所有反射单元中至少有四种方向不同的照射
一种基于MEMS振镜的激光雷达发射系统.pdf
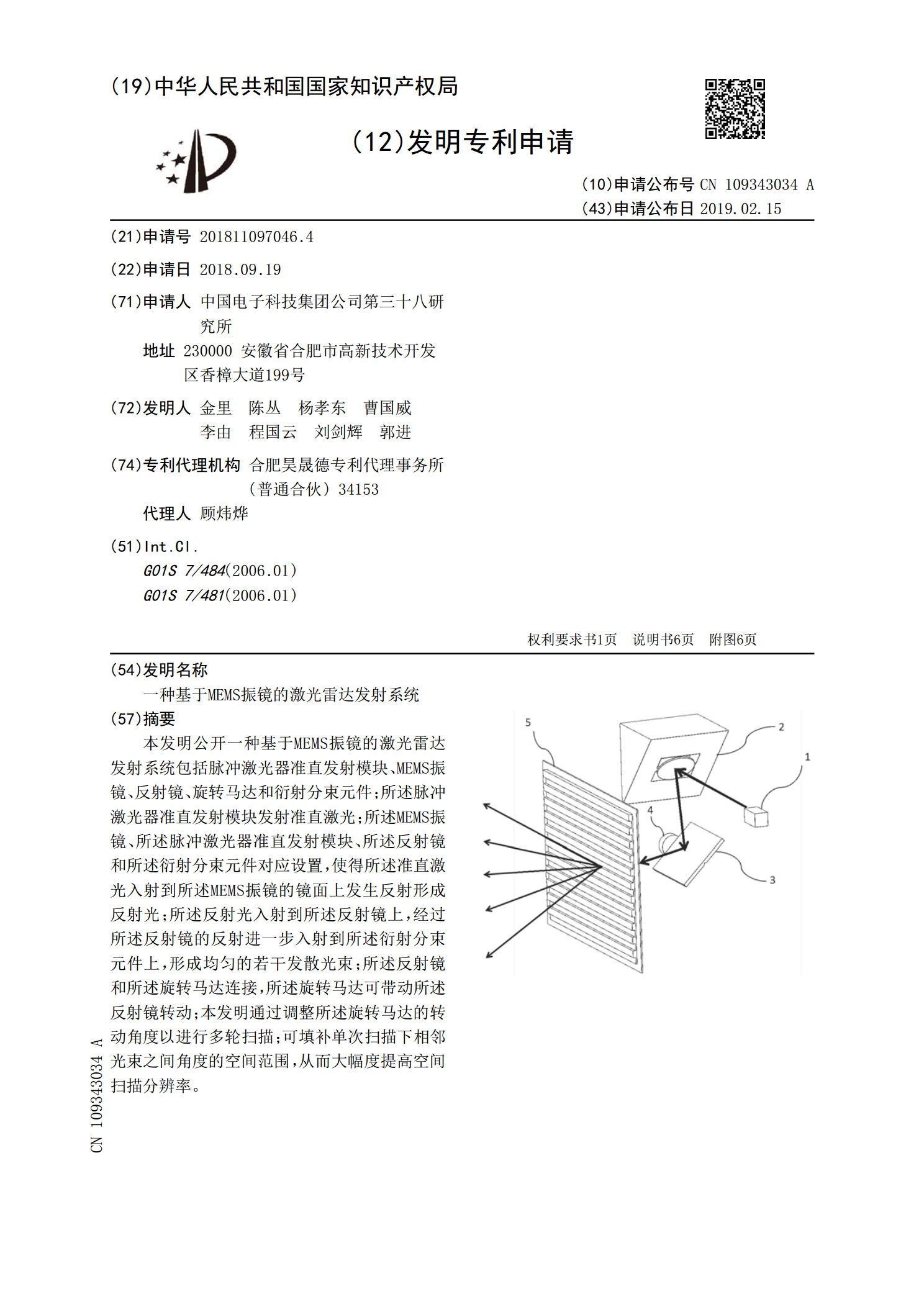
本发明公开一种基于MEMS振镜的激光雷达发射系统包括脉冲激光器准直发射模块、MEMS振镜、反射镜、旋转马达和衍射分束元件;所述脉冲激光器准直发射模块发射准直激光;所述MEMS振镜、所述脉冲激光器准直发射模块、所述反射镜和所述衍射分束元件对应设置,使得所述准直激光入射到所述MEMS振镜的镜面上发生反射形成反射光;所述反射光入射到所述反射镜上,经过所述反射镜的反射进一步入射到所述衍射分束元件上,形成均匀的若干发散光束;所述反射镜和所述旋转马达连接,所述旋转马达可带动所述反射镜转动;本发明通过调整所述旋转马达的
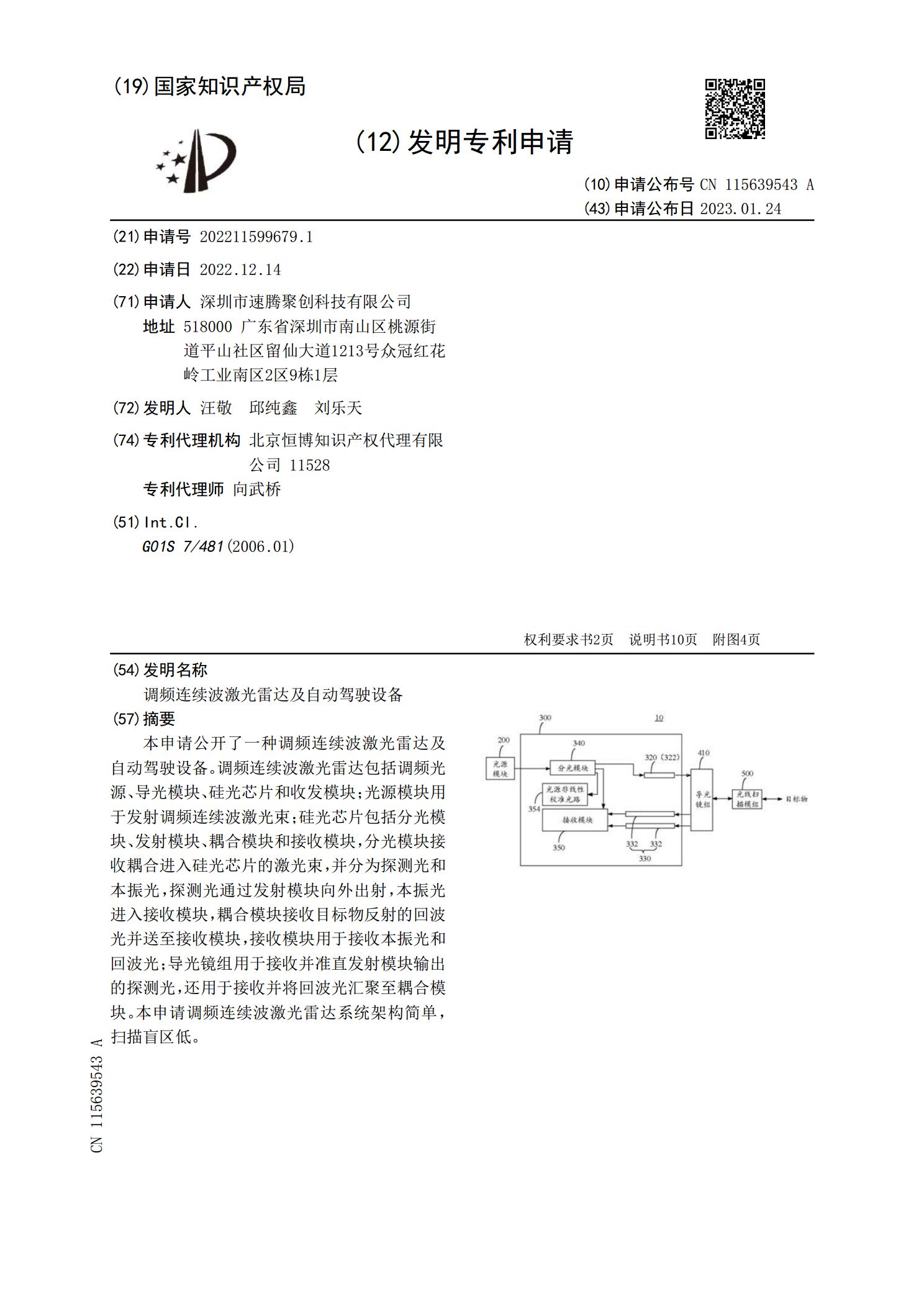
调频连续波激光雷达及自动驾驶设备.pdf
本申请公开了一种调频连续波激光雷达及自动驾驶设备,激光雷达包括光源模块、硅光芯片和折光模块,硅光芯片包括分光模块、耦合模块和多个收发单元,多个收发单元的端面沿第一方向排列,分光模块接收耦合进入硅光芯片的激光束,并分为多束探测光,多束探测光传输至对应的多个收发单元,收发单元将接收到的探测光向外出射,也将接收到的回波光传输至耦合模块,形成探测通道;折光模块用于将多个收发单元发射的探测光进行偏折使多束探测光在第二方向错位射出,以及用于将在第二方向错位的多束回波光进行偏折后投射至对应的收发单元,第二方向为垂直于收