
一种管道机器人结构与控制系统的设计.doc

骊蓉****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共52页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种管道机器人结构与控制系统的设计.doc
摘要在现代社会中,人们总要碰到多种各样旳管道设施,而许多管道系统不是架设在空中就是深埋于地下,这样一来,通过人力对管道旳内部进行检测就很不以便。本文研制旳移动式管道机器人自身携带CCD摄像头,可以对一定口径旳管道内壁进行检测,具有较高旳实用价值。本文首先对国内外管道机器人技术旳发展做了综述,给出了移动式管道机器人本体构造设计方案,详细简介了机器人旳驱动机构、云台系统等环节旳构造。所讨论旳机器人采用上下位机旳控制模式,使用了目前在国内较为先进旳光纤信来传送控制信号和来自CCD摄像机旳图像信号。下位机以LPC

一种管道机器人结构与控制新版系统的设计.doc
摘要在现代社会中,大家总要碰到多种多样管道设施,而很多管道系统不是架设在空中就是深埋于地下,这么一来,经过人力对管道内部进行检测就很不方便。本文研制移动式管道机器人本身携带CCD摄像头,能够对一定口径管道内壁进行检测,含有较高实用价值。本文首先对中国外管道机器人技术发展做了综述,给出了移动式管道机器人本体结构设计方案,具体介绍了机器人驱动机构、云台系统等步骤结构。所讨论机器人采取上下位机控制模式,使用了现在在中国较为优异光纤信来传送控制信号和来自CCD摄像机图像信号。下位机以LPC2114为关键处理器,进

一种管道检测机器人的控制系统.pdf
本发明公开了一种管道检测机器人的控制系统,其特征在于:包括操作系统和机器人执行系统,操作系统包括显示器、操作键盘、控制处理中心,操作键盘连接控制处理中心,控制处理中心通过无线或有线连接机器人执行系统,机器人执行系统包括机器人的车身控制部分、车头控制部、LED控制部分,车身控制部分包括:后摄像头的DC12V电源提供、散光灯的开关控制、举升电机正反转、前后电机A和前后电机B的正反转和PWM控制;车头控制部分包括:霍尔开关、旋转电机正反转、点头电机正反转;LED控制部分包括:前摄像头的DC12V电源、散光灯的P
一种管道机器人支腿结构.pdf
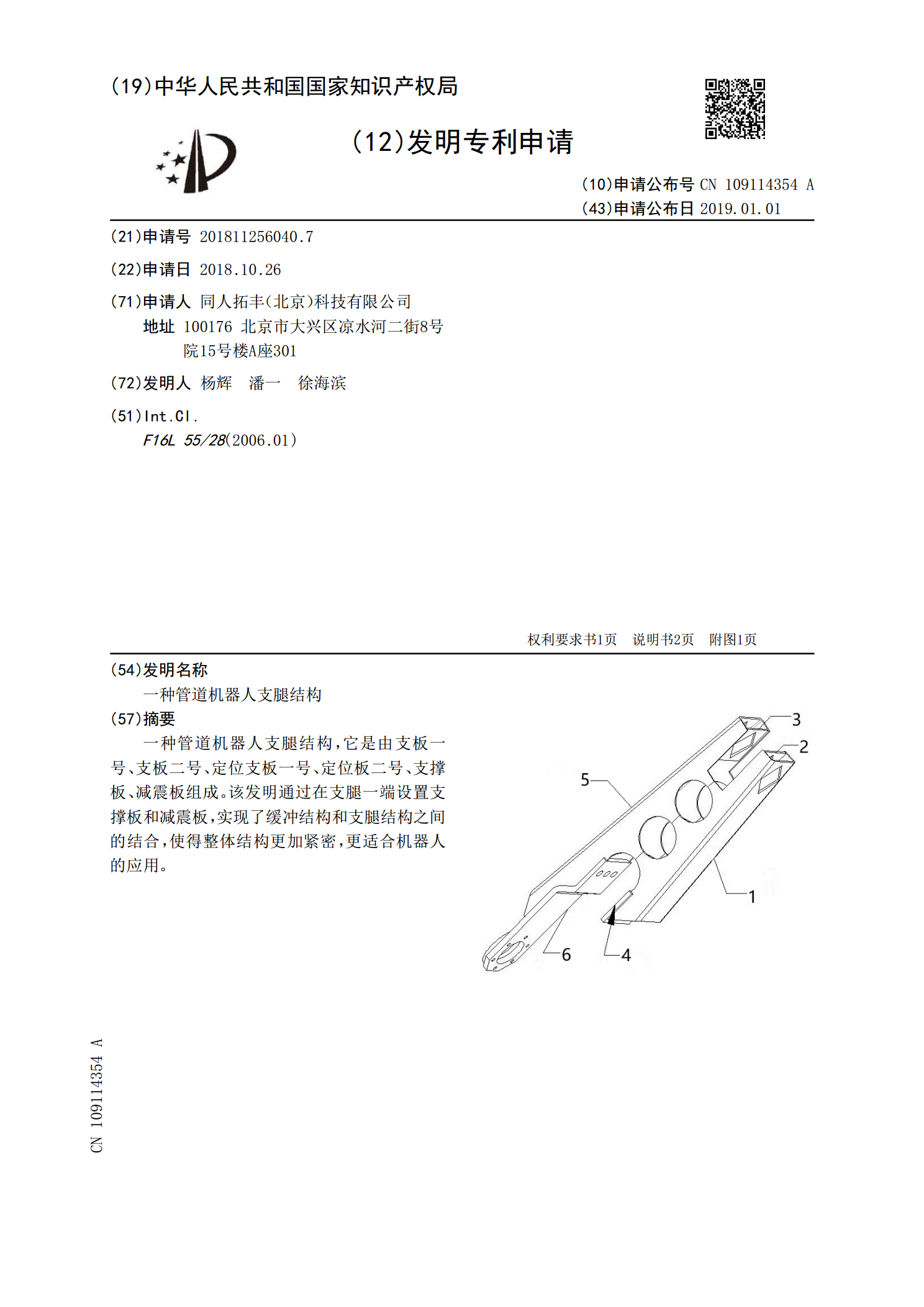
一种管道机器人支腿结构,它是由支板一号、支板二号、定位支板一号、定位板二号、支撑板、减震板组成。该发明通过在支腿一端设置支撑板和减震板,实现了缓冲结构和支腿结构之间的结合,使得整体结构更加紧密,更适合机器人的应用。
一种行走转向结构及基于该结构的管道机器人.pdf
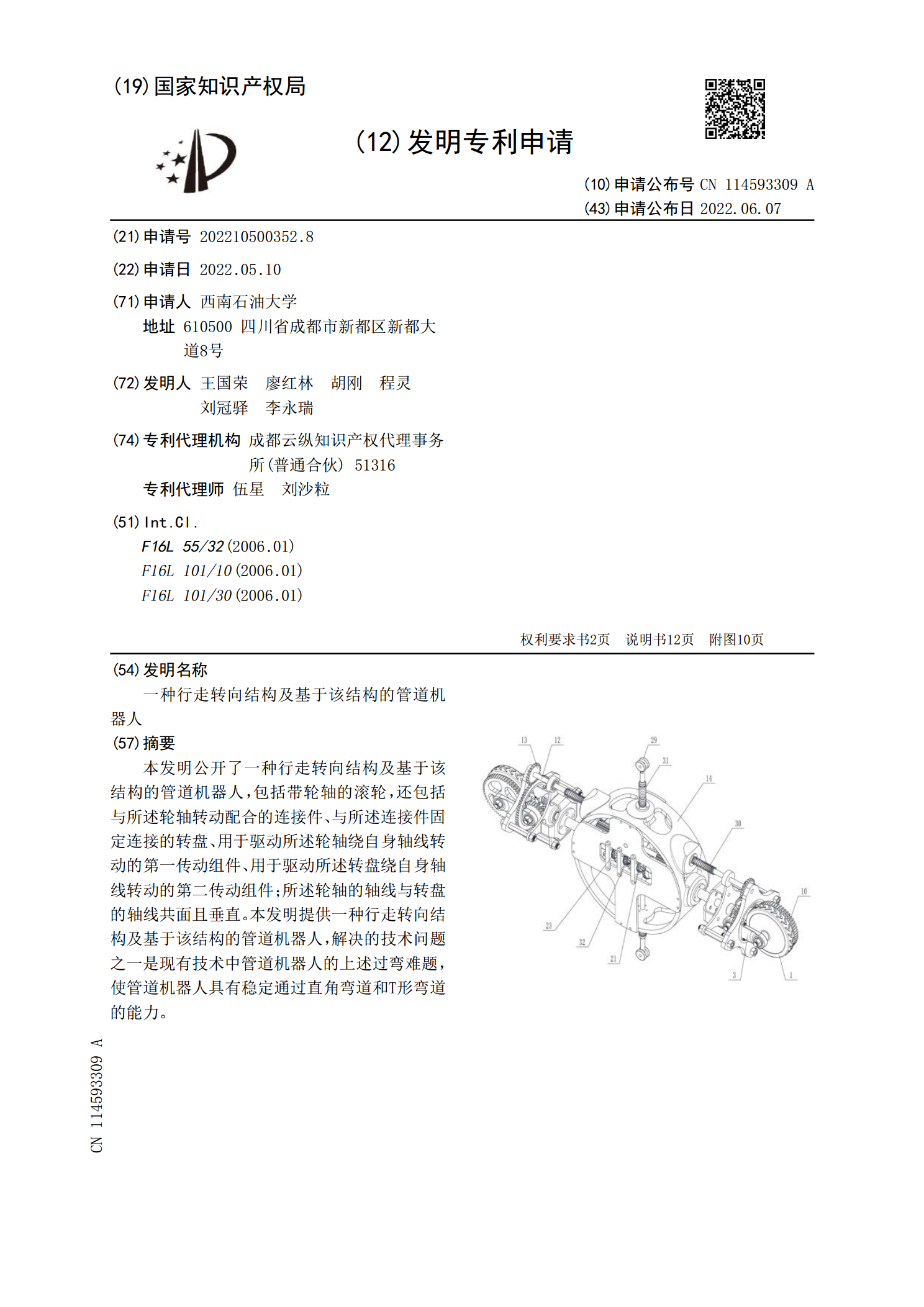
本发明公开了一种行走转向结构及基于该结构的管道机器人,包括带轮轴的滚轮,还包括与所述轮轴转动配合的连接件、与所述连接件固定连接的转盘、用于驱动所述轮轴绕自身轴线转动的第一传动组件、用于驱动所述转盘绕自身轴线转动的第二传动组件;所述轮轴的轴线与转盘的轴线共面且垂直。本发明提供一种行走转向结构及基于该结构的管道机器人,解决的技术问题之一是现有技术中管道机器人的上述过弯难题,使管道机器人具有稳定通过直角弯道和T形弯道的能力。