
轮毂电机驱动车辆悬架系统设计及优化样本.doc

一吃****福乾


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

轮毂电机驱动车辆悬架系统设计及优化样本.doc
轮毂电机驱动车辆悬架系统设计及优化引言本文简介了轮毅电机式驱动车辆发展历史和发呈现状,针对高校自主开发电动汽车实体平台特点,以及老式悬架自身优势,选用麦弗逊悬架作为匹配对象,进行虚拟样机模型建立,并进行仿真分析及优化,进而在此基本之上完毕整车模型创立,进行整车操纵稳定性和平顺性实验仿真,得到实验成果并进行评价。本文结介国外最新科技,全而简介了电动轮悬架系统与电动轮自身高度结介积极轮技术,这是将来悬架发展方向。在本文中,一方面,依照悬架各部件之间相对位置,在ADAMS\Ca:中建立麦弗逊前悬架虚拟样机模型,

轮毂电机驱动车辆悬架系统设计及优化样本.doc
轮毂电机驱动车辆悬架系统设计及优化引言本文简介了轮毅电机式驱动车辆发展历史和发呈现状,针对高校自主开发电动汽车实体平台特点,以及老式悬架自身优势,选用麦弗逊悬架作为匹配对象,进行虚拟样机模型建立,并进行仿真分析及优化,进而在此基本之上完毕整车模型创立,进行整车操纵稳定性和平顺性实验仿真,得到实验成果并进行评价。本文结介国外最新科技,全而简介了电动轮悬架系统与电动轮自身高度结介积极轮技术,这是将来悬架发展方向。在本文中,一方面,依照悬架各部件之间相对位置,在ADAMS\Ca:中建立麦弗逊前悬架虚拟样机模型,

电动汽车轮毂电机—多连杆悬架系统设计与优化.docx
电动汽车轮毂电机—多连杆悬架系统设计与优化电动汽车轮毂电机—多连杆悬架系统设计与优化随着全球环保理念的普及和新能源技术的快速发展,电动汽车作为新一代的代表性产品,正逐渐走进人们的生活。与传统燃油车相比,电动汽车具有零排放、低噪音、高效率等优势,受到了越来越多的消费者的青睐。在电动汽车的结构设计中,轮毂电机是其中的一个重要部分。为了使电动汽车具有更加优秀的行驶稳定性和悬挂舒适性,多连杆悬架系统则成为了设计的重点。本文将从轮毂电机、多连杆悬架系统两个方面探讨电动汽车的技术优化。一、电动汽车轮毂电机设计电动汽车
一种轮毂电机驱动车辆前后通用的多连杆悬架机构.pdf
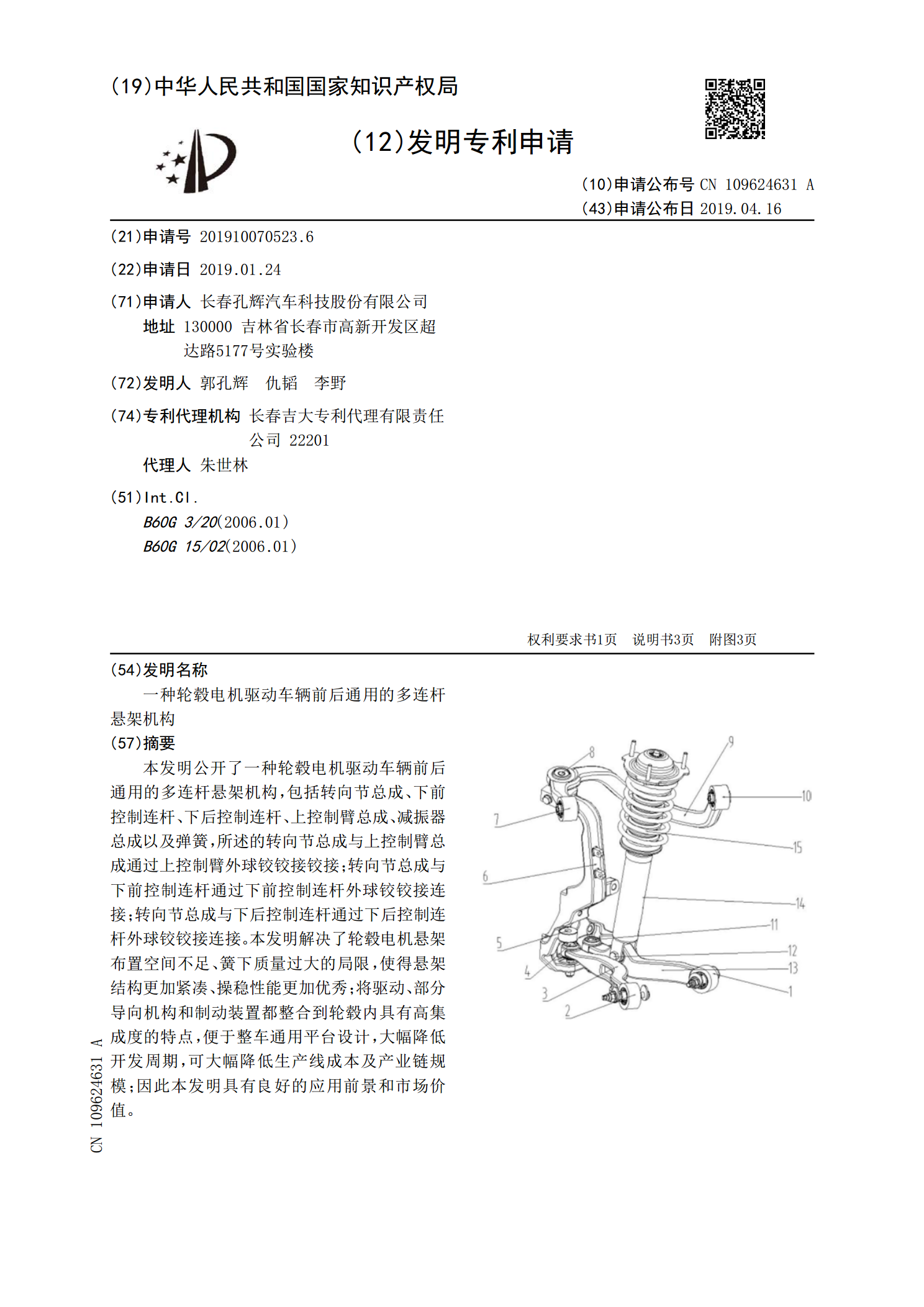
本发明公开了一种轮毂电机驱动车辆前后通用的多连杆悬架机构,包括转向节总成、下前控制连杆、下后控制连杆、上控制臂总成、减振器总成以及弹簧,所述的转向节总成与上控制臂总成通过上控制臂外球铰铰接铰接;转向节总成与下前控制连杆通过下前控制连杆外球铰铰接连接;转向节总成与下后控制连杆通过下后控制连杆外球铰铰接连接。本发明解决了轮毂电机悬架布置空间不足、簧下质量过大的局限,使得悬架结构更加紧凑、操稳性能更加优秀;将驱动、部分导向机构和制动装置都整合到轮毂内具有高集成度的特点,便于整车通用平台设计,大幅降低开发周期,可
用于轮毂驱动车辆的转向系统及轮毂驱动车辆.pdf
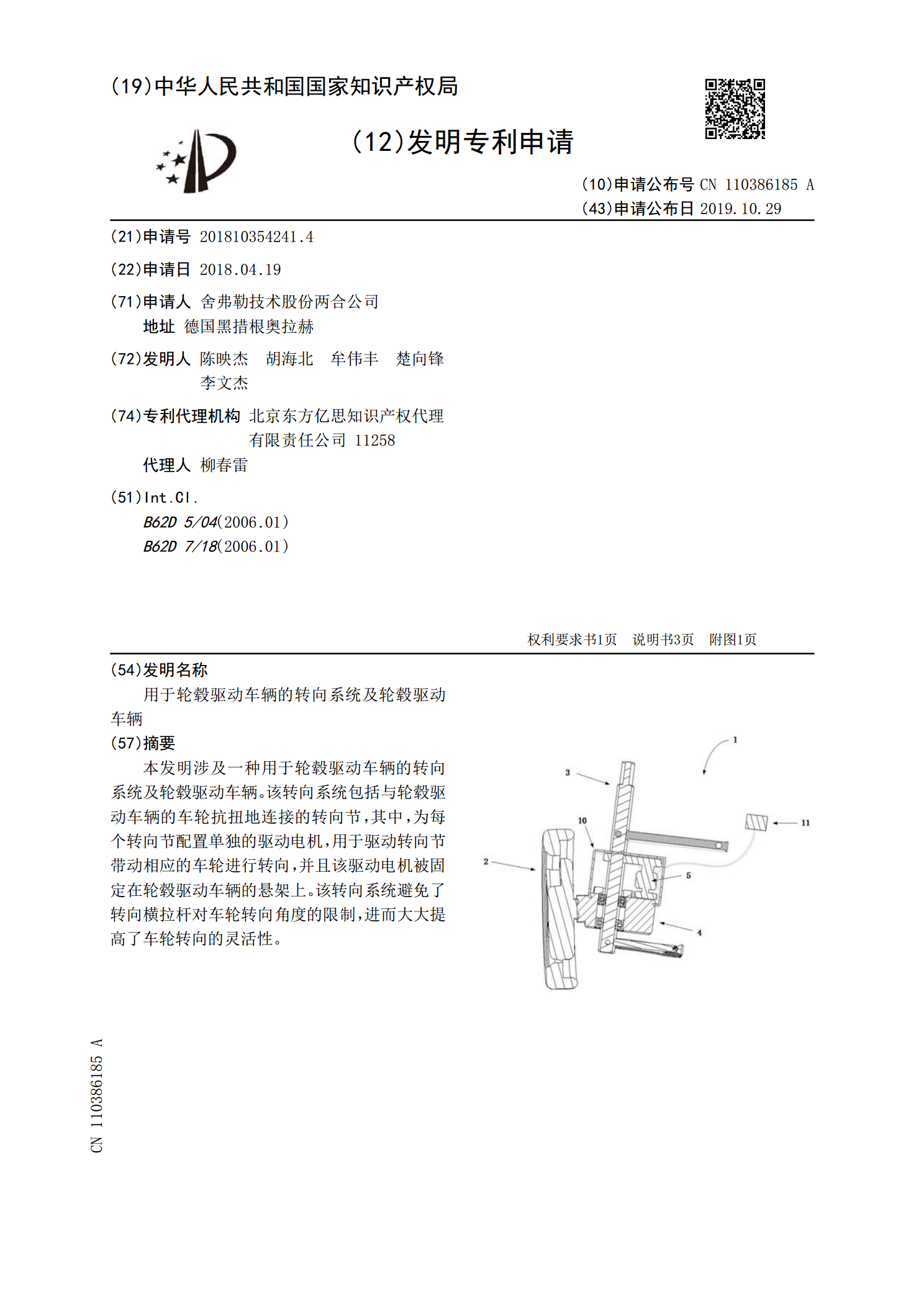
本发明涉及一种用于轮毂驱动车辆的转向系统及轮毂驱动车辆。该转向系统包括与轮毂驱动车辆的车轮抗扭地连接的转向节,其中,为每个转向节配置单独的驱动电机,用于驱动转向节带动相应的车轮进行转向,并且该驱动电机被固定在轮毂驱动车辆的悬架上。该转向系统避免了转向横拉杆对车轮转向角度的限制,进而大大提高了车轮转向的灵活性。