
基于无线雷达信号的步态识别方法.pdf

Ke****67

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于无线雷达信号的步态识别方法.pdf
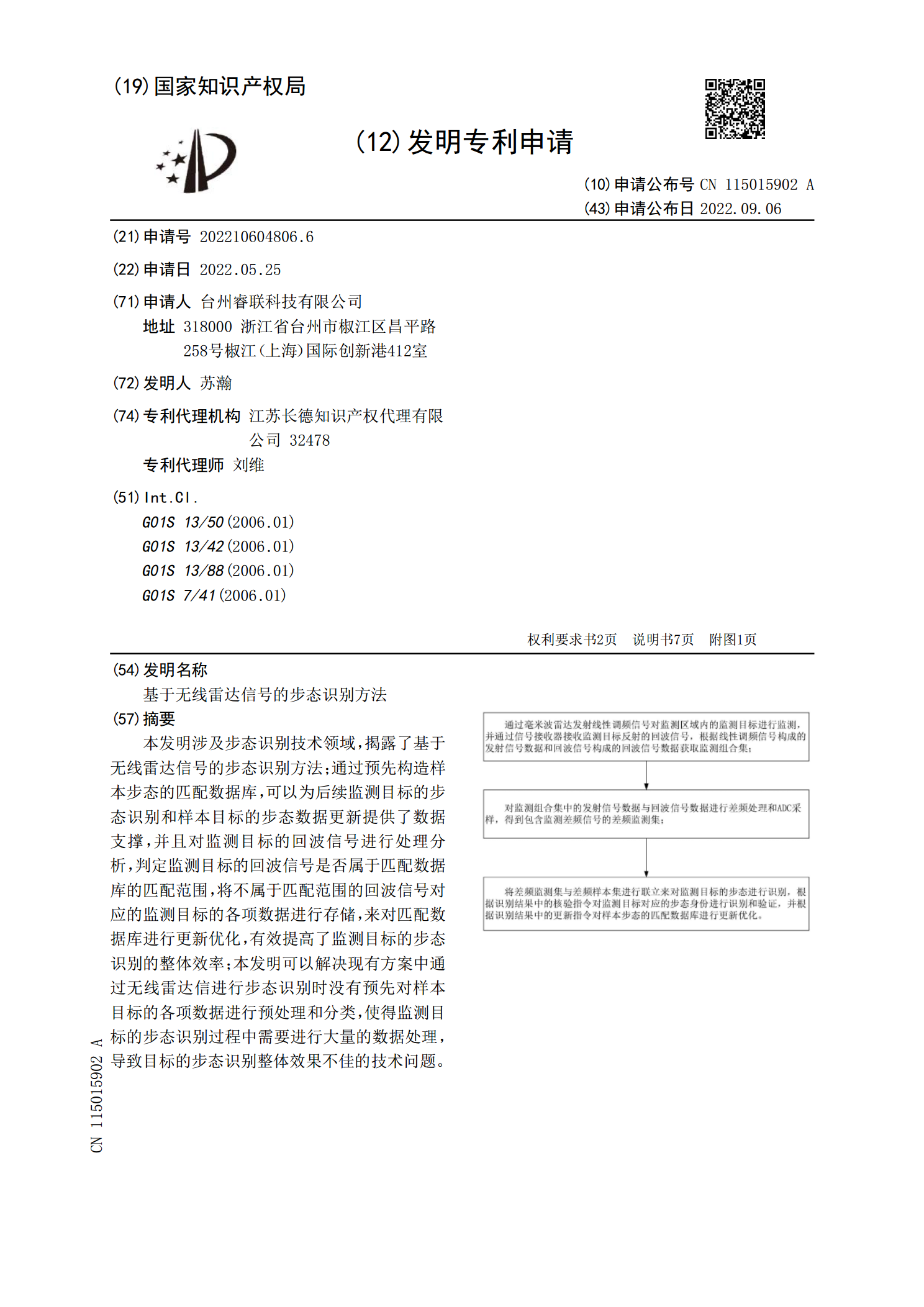
本发明涉及步态识别技术领域,揭露了基于无线雷达信号的步态识别方法;通过预先构造样本步态的匹配数据库,可以为后续监测目标的步态识别和样本目标的步态数据更新提供了数据支撑,并且对监测目标的回波信号进行处理分析,判定监测目标的回波信号是否属于匹配数据库的匹配范围,将不属于匹配范围的回波信号对应的监测目标的各项数据进行存储,来对匹配数据库进行更新优化,有效提高了监测目标的步态识别的整体效率;本发明可以解决现有方案中通过无线雷达信进行步态识别时没有预先对样本目标的各项数据进行预处理和分类,使得监测目标的步态识别过程

基于多频多域深度学习的雷达步态识别方法.pdf
本发明公开了一种基于多频多域深度学习的雷达步态识别方法,用频率步进连续波雷达对步态多次采样,对每个样本分别处理得到多频率时频域微多普勒谱图和时域距离像。将多频率时频域谱图按相似度分组,再将同一组时频域谱图组合为一多通道的高维时频域谱图,并运用多个卷积神经网络分别提取多组高维时频域谱图和时域距离像的分类特征向量,将提取的多组时频域特征和时域特征结合为一个新的特征向量,并将其传入到稀疏自编码神经网络去除无用特征后输入到分类器中完成步态分类。本发明通过获取多频率时频域微多普勒谱图和时域距离像,由深度学习网络综合
基于雷达的脚踢信号识别方法、雷达、存储介质及汽车.pdf
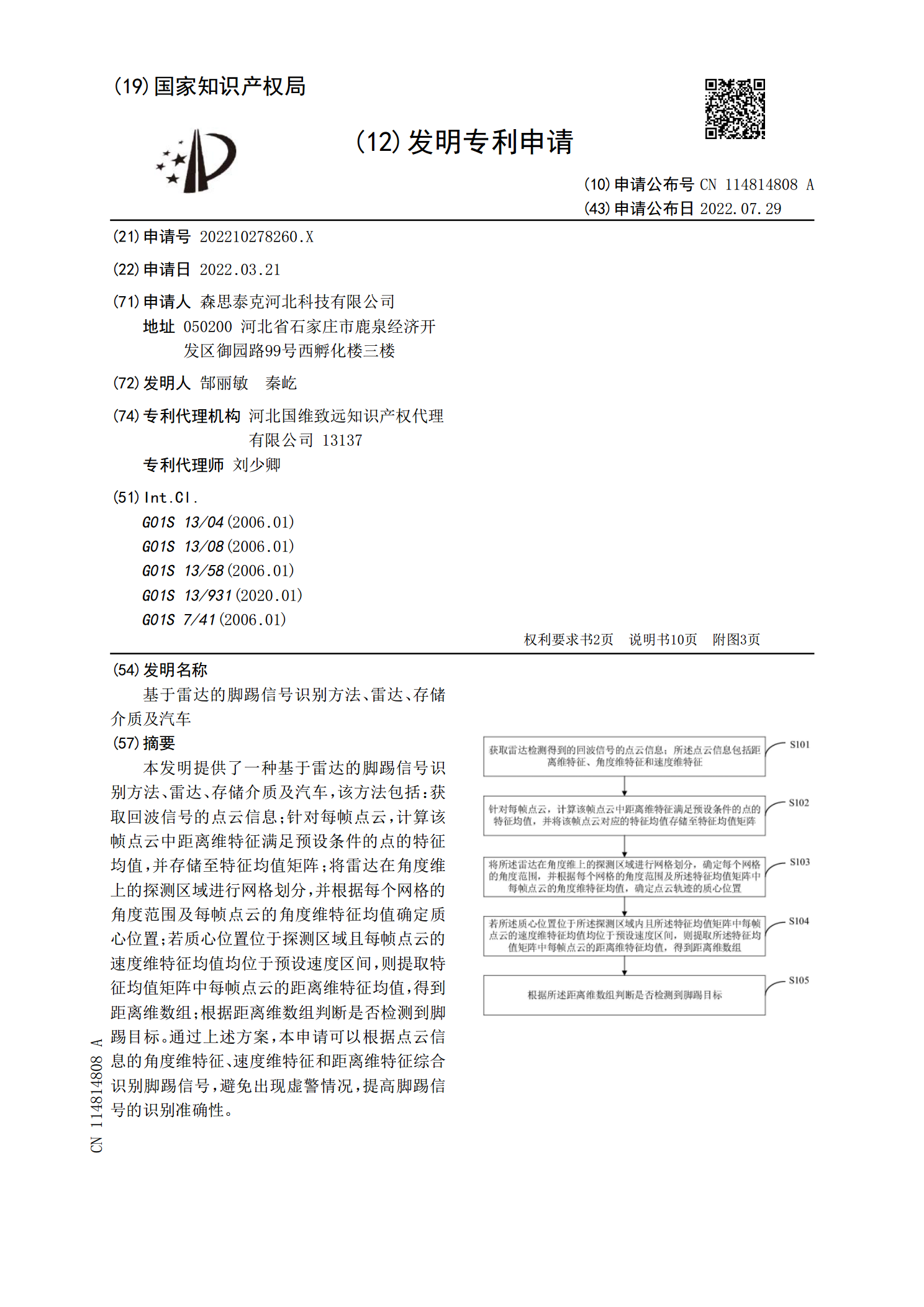
本发明提供了一种基于雷达的脚踢信号识别方法、雷达、存储介质及汽车,该方法包括:获取回波信号的点云信息;针对每帧点云,计算该帧点云中距离维特征满足预设条件的点的特征均值,并存储至特征均值矩阵;将雷达在角度维上的探测区域进行网格划分,并根据每个网格的角度范围及每帧点云的角度维特征均值确定质心位置;若质心位置位于探测区域且每帧点云的速度维特征均值均位于预设速度区间,则提取特征均值矩阵中每帧点云的距离维特征均值,得到距离维数组;根据距离维数组判断是否检测到脚踢目标。通过上述方案,本申请可以根据点云信息的角度维特征
基于深度迁移学习的雷达有源干扰信号识别方法.pdf
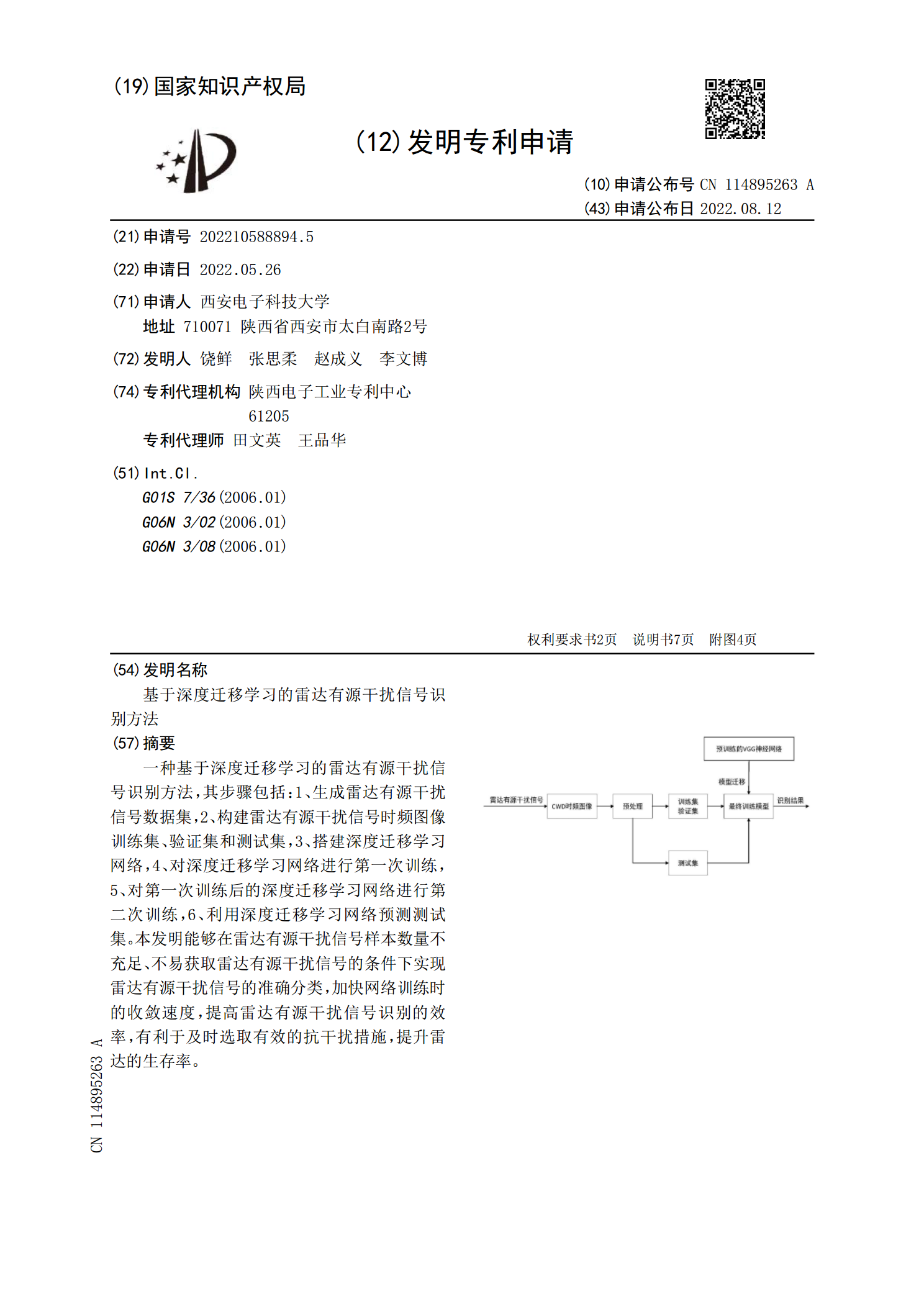
一种基于深度迁移学习的雷达有源干扰信号识别方法,其步骤包括:1、生成雷达有源干扰信号数据集,2、构建雷达有源干扰信号时频图像训练集、验证集和测试集,3、搭建深度迁移学习网络,4、对深度迁移学习网络进行第一次训练,5、对第一次训练后的深度迁移学习网络进行第二次训练,6、利用深度迁移学习网络预测测试集。本发明能够在雷达有源干扰信号样本数量不充足、不易获取雷达有源干扰信号的条件下实现雷达有源干扰信号的准确分类,加快网络训练时的收敛速度,提高雷达有源干扰信号识别的效率,有利于及时选取有效的抗干扰措施,提升雷达的生

多普勒雷达信号类型识别方法.pdf
本发明公开一种多普勒雷达信号类型识别方法,该方法包括采集已知类型的多普勒雷达回波信号样本,提取出信号样本的特征向量;其中,已知类型的多普勒雷达回波信号样本包括运动目标信号样本和干扰信号样本;将信号样本的特征向量输入训练网络进行分类训练学习,构建模型网络;其中,训练网络包括依次连接的输入层、隐层和输出层;实时采集目标多普勒雷达回波信号,提取出相应的目标特征向量;将目标特征向量导入模型网络,识别出目标多普勒雷达回波信号的类型。通过采用上述方案,解决了多普勒雷达无法区分运动目标信号与树木雨水干扰信号的问题,且识