
导向臂视觉检测装置及检测方法.pdf

俊凤****bb


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

导向臂视觉检测装置及检测方法.pdf
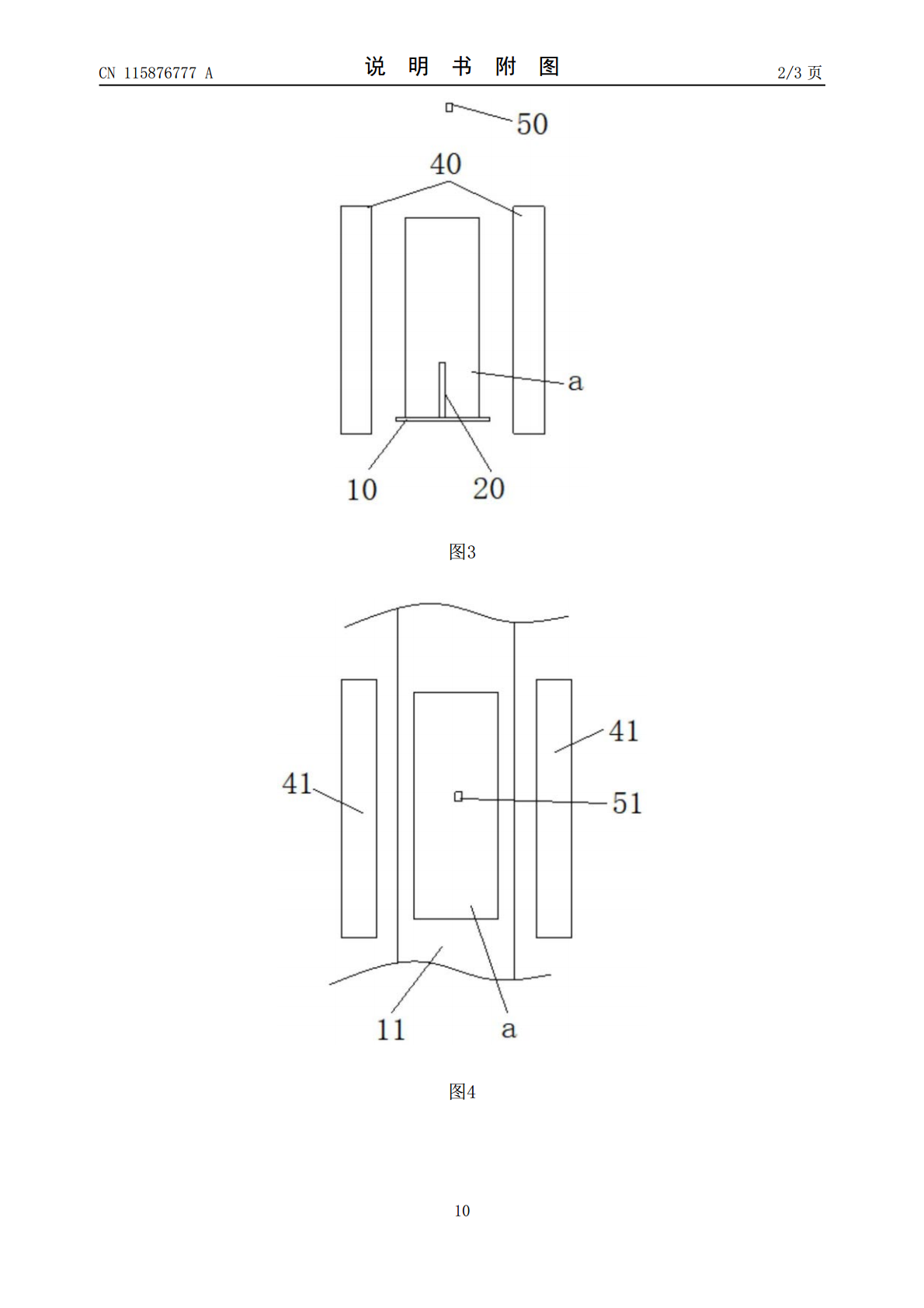
本发明涉及一种导向臂视觉检测装置及方法,包括传送单元、停靠单元、拍摄单元,传送单元包括第一传送带、第二传送带,第一传送带、第二传送带之间形成小于工件的高度的间隙;停靠单元设置在第一传送带上,用于使工件保持立姿状态在第一传送带上进行输送,停靠单元包括前档件、后挡件组,前挡杆、后挡件组之间的距离大于工件的宽度,前挡杆、后挡件组的高度小于间隙的距离;拍摄单元包括第一拍摄件、第二拍摄件,第一拍摄件朝向第一传送带的来料方向,第二拍摄件朝向第二传送带的表面。本发明减少空间的占用,降低成本,有利于工件的连续、高效检测,

视觉盲区检测方法及装置.pdf
本公开提供一种视觉盲区检测方法及装置,当检测到障碍物时,获取障碍物的位置信息和自动驾驶交通工具上的传感器的位置信息,基于障碍物的位置信息、传感器的位置信息以及电子地图中的道路区域,确定自动驾驶交通工具的一个视觉盲区,从而实现自动驾驶交通工具自动检测出视觉盲区范围;这样,自动驾驶交通工具可以在进入视觉盲区之前提前采取一定措施,即使发生有行人或车辆突然从视觉盲区出现,自动驾驶交通工具也能够及时处理,以降低视觉盲区中的车辆和/或行人带来的安全风险,提高自动驾驶的安全性。本公开还提供一种电子设备和计算机可读介质。

机械臂姿态检测方法和装置.pdf
本申请是关于一种机械臂姿态检测方法和装置。该方法包括以下步骤:获取机械臂上N个动态检测点在Ti时刻的N个检测位置坐标;所述N为大于或等于一的整数;其中,一个动态检测点在Ti时刻的检测位置坐标根据两个蓝牙模块分别在两个静态接收点的检测数据计算得到;获取所述机械臂在所述Ti时刻的N个预设位置坐标;根据N个所述检测位置坐标和N个所述预设位置坐标确定所述机械臂是否出现姿态偏差。本申请根据同一动态检测点在示教器训练时记录的Ti时刻的预设位置坐标和该动态检测点在Ti时刻的检测位置坐标进行比对,进而确认该动态检测点是否

安瓿瓶视觉检测装置及检测方法.pdf
本发明提供安瓿瓶视觉检测装置及检测方法。该装置包括:安瓿瓶,为检测及判断的对象;轮毂电机,使安瓿瓶旋转;叶轮,将安瓿瓶移送至轮毂电机或排出;输送器,将多个安瓿瓶自动移送至叶轮或对从叶轮排出的安瓿瓶再次回收;反射光照射器,照射光源以用于获取安瓿瓶的影像数据;线阵相机,检测安瓿的OPC印刷状态;面阵相机,检测安瓿瓶的尺寸精确度及是否存在杂质;冷却及排气扇,在检测安瓿瓶的空间内,缓解因反射光照射器而造成的发热并执行换气功能;动作控制器,控制轮毂电机、叶轮、输送器、反射光照射器、冷却及排气扇的电源施加及动作;影像

导向臂自动打磨装置及打磨方法.pdf
本发明涉及一种导向臂自动打磨装置及方法,装置包括传送单元:包括第一传送带、第二传送带;定位单元:包括第一停靠板、第二停靠板、第一固定组件以及第二固定组件,第一停靠板、第二停靠板倾斜设置,第一停靠板上端与第一传送带对接,第二停靠板位于第一停靠板的下方,第一停靠板下端与第二停靠板之间形成间隙,第二停靠板可与第二传动带对接;第一固定组件、第二固定组件用于固定位于第一停靠板、第二停靠板上的导向臂;自动打磨单元:包括第一打磨单元、第二打磨单元,第一打磨单元、第二打磨单元用于打磨位于第一停靠板、第二停靠板上的导向臂。