
一种智能捡球机器人.pdf

一只****生物


1/10

2/10
3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种智能捡球机器人.pdf
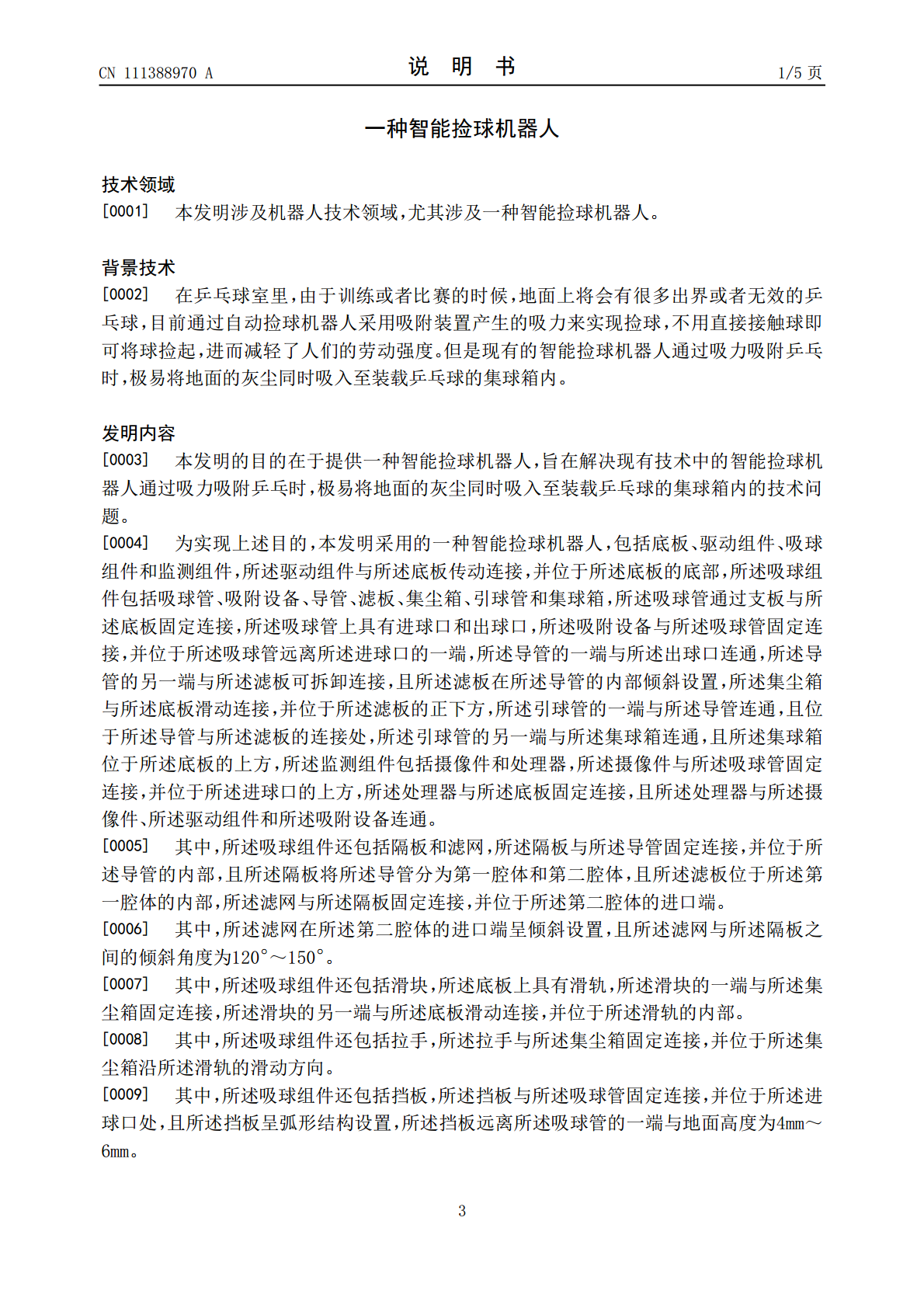
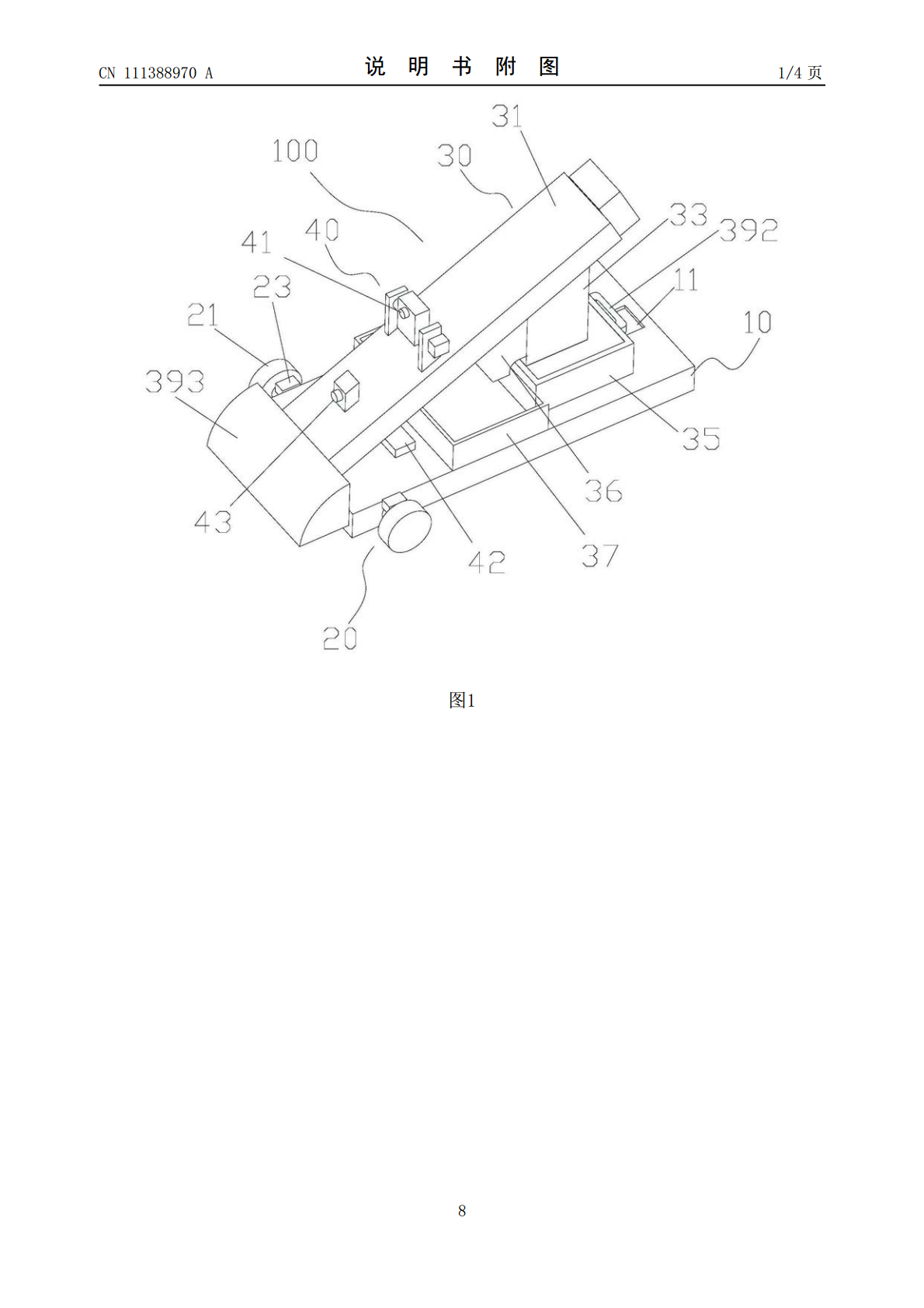
本发明公开了一种智能捡球机器人,通过启动所述智能捡球机器人时,所述摄像件在检测到乒乓球位置后,所述处理器控制所述驱动组件动作,将所述智能捡球机器人移动到乒乓球前方时,所述处理器控制所述吸附设备动作,从而将乒乓球和颗粒灰尘吸入所述吸球管内,吸入的乒乓球和颗粒灰尘会落入所述导管内,乒乓球和颗粒灰尘均会落入至所述滤板上,乒乓球会顺着所述滤板的倾斜方向落入至所述引球管内,最终落入所述集球箱,颗粒灰尘会通过所述滤板上的多个滤孔漏入至所述集尘箱进行收集,以此实现所述智能捡球机器人通过吸力吸附乒乓时,能够将乒乒球和灰尘

智能捡球机器人.pdf
本发明涉及一种智能捡球机器人,红外线测距器(4)安装在双摄像头(1)的上方,双摄像头(1)安装于齿条控制箱(2)的上方,齿条控制箱(2)安装在承装箱(10)上表面的中间位置,带齿条的耙子(3)插入齿条控制箱(2)中,铲子(5)安装在承装箱(10)的前部,右前轮(6)右后轮(7)和左后轮(8)左前轮(9)分别安装在承装箱(10)的左右两侧,机器人装有电机带动轮子可实现机器人自主运动,双摄像头(1)在机器人最上方可以对整个球场进行拍照摄像,发现球后,红外线测距器(4)测量出到球的最佳路线,机器人自主移动到目标

智能捡球机器人.pdf
本发明提供一种智能捡球机器人,红外线测距器(4)安装在双摄像头(1)的上方,双摄像头(1)安装于齿条控制箱(2)的上方,齿条控制箱(2)安装在承装箱(10)上表面的中间位置,带齿条的耙子(3)插入齿条控制箱(2)中,铲子(5)安装在承装箱(10)的前部,右前轮(6)右后轮(7)和左后轮(8)左前轮(9)分别安装在承装箱(10)的左右两侧,机器人装有电机带动轮子可实现机器人自主运动,双摄像头(1)在机器人最上方可以对整个球场进行拍照摄像,发现球后,红外线测距器(4)测量出到球的最佳路线,机器人自主移动到目标

一种羽毛球智能捡球理球机器人.pdf
本发明提供了一种羽毛球智能捡球理球机器人,机罩(1)的内部设有理球装置(5)和分选装置(6),理球装置(5)包括提升器(501)、分流筒(502)和落球滑道(503),提升器(501)包括环形传送带和安装在其上的多排梳齿,分流筒(502)的顶部中间设有倒V型分流板,落球滑道(503)置于分流筒(502)的底部且在所述倒V型分流板的两侧,落球滑道(503)整体呈勺型且滑道开口面积从滑道的拐点处逐渐减小,分选装置(6)包括球体筛选摄像头(601)、凸轮组(602)和多个夹球机构(603),多个夹球机构(603
一种轮式多机械手智能捡球机器人.pdf
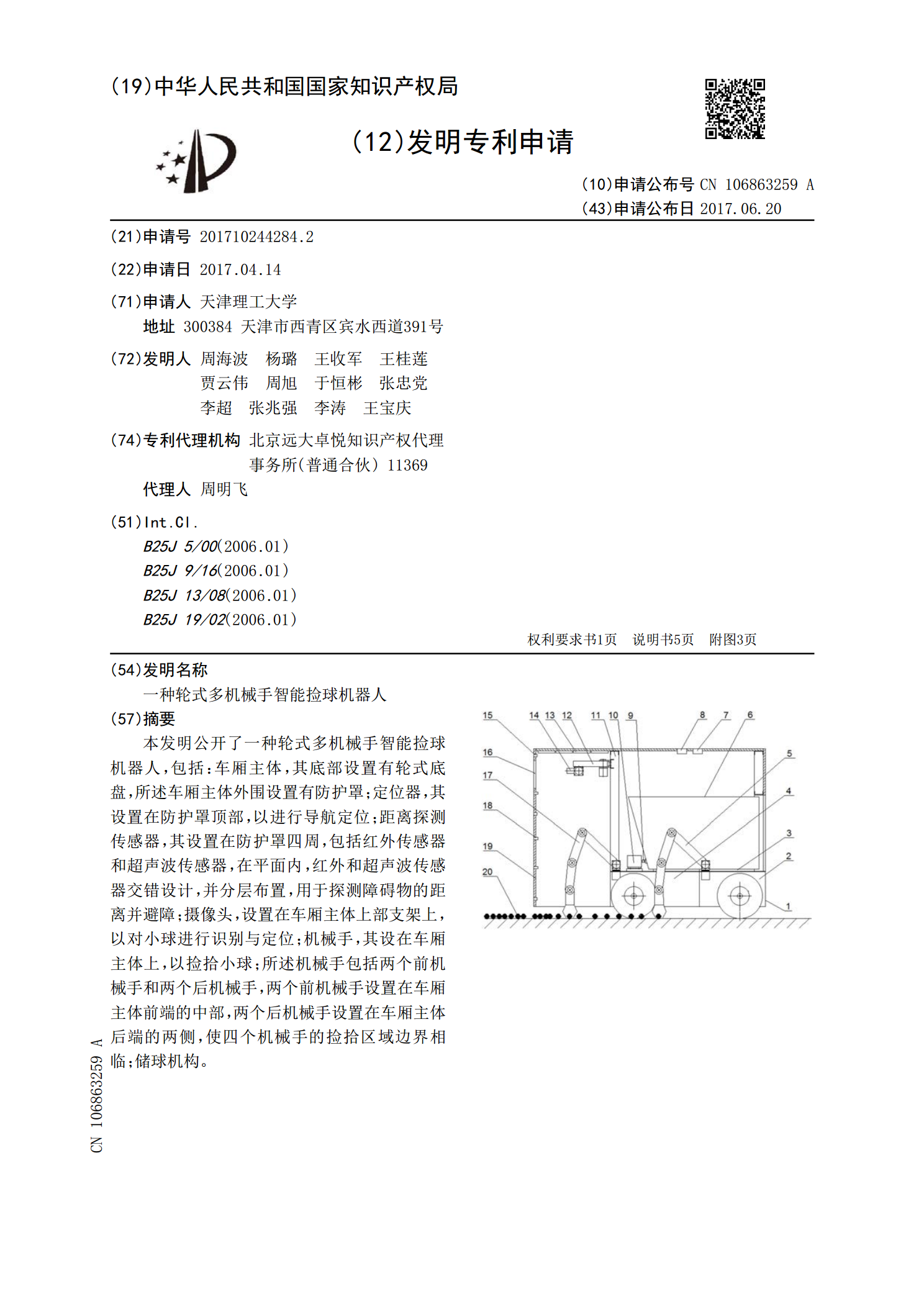
本发明公开了一种轮式多机械手智能捡球机器人,包括:车厢主体,其底部设置有轮式底盘,所述车厢主体外围设置有防护罩;定位器,其设置在防护罩顶部,以进行导航定位;距离探测传感器,其设置在防护罩四周,包括红外传感器和超声波传感器,在平面内,红外和超声波传感器交错设计,并分层布置,用于探测障碍物的距离并避障;摄像头,设置在车厢主体上部支架上,以对小球进行识别与定位;机械手,其设在车厢主体上,以捡拾小球;所述机械手包括两个前机械手和两个后机械手,两个前机械手设置在车厢主体前端的中部,两个后机械手设置在车厢主体后端的两