
一种基于远程控制系统的防撞型越障巡线机器人.pdf

努力****凌芹


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于远程控制系统的防撞型越障巡线机器人.pdf
本发明涉及探测机器人领域,具体涉及一种基于远程控制系统的防撞型越障巡线机器人,包括车架、驱动组件、除尘组件、图像采集组件、一组驱动轮和一组越障轮,驱动轮包括两个第一履带式轮组,越障轮包括两个第二履带式轮组,每个第一履带式轮组与对应的第二履带式轮组相连,图像采集组件包括两轴旋转机构和摄像头,两轴先转机构设置于车架的前端,摄像头设置于两轴旋转机构的顶部连接,本发明通过设置两组履带牵引机构,其中一组用于推动机器人前进,另一组用于向上翻转爬壁拉动机器人,在前端拉后端推的方式下实现越障过程,并配合能够多方向转动的摄

巡线机器人越障装置.pdf
本发明提供了一种巡线机器人越障装置,涉及电力巡线技术领域,包括位于输电线路下方沿输电线路设置的基板,基板上表面设有至少两个行走单元,下表面设有前越障单元和后越障单元;行走单元包括能够滚动挂接于输电线路上的行走轮和第一脱挂机构;前越障单元包括与基板滑动连接的前伸出板和能够固定挂接于输电线路上的前挂接块,前挂接块通过第二脱挂机构连接于前伸出板的伸出端,前伸出板由前伸驱动机构驱动相对于基板滑动;后越障单元与前越障单元结构相同,本发明提供的巡线机器人越障装置,使现有技术中的巡线机器人在巡线时能够越过输电线路上的障

一种巡线机器人跨越障碍滑移机构及巡线机器人设备.pdf
本发明涉及一种巡线机器人跨越障碍滑移机构,包括:沿输电线缆方向顺次安装在设备机架内的至少三组滑移组件,每组滑移组件均具有用于悬挂在输电线缆上随设备机架的带动而滑移的滑移挂轮;且所述滑移机构还包括:设置在位于前侧的滑移组件上用于检测线路障碍的检测反馈单元;以及信号控制单元,用于根据线路障碍检测结果发送控制信号给所述至少三组滑移组件,以沿输电线缆方向依次控制每组滑移组件的滑移挂轮脱离所述输电线缆以跨越所述线路障碍。本发明的巡线机器人跨越障碍滑移机构及巡线机器人设备通过悬挂于输电线缆上的滑移挂轮支撑设备整体重量
一种巡线机器人跨越障碍行走机构及巡线机器人设备.pdf
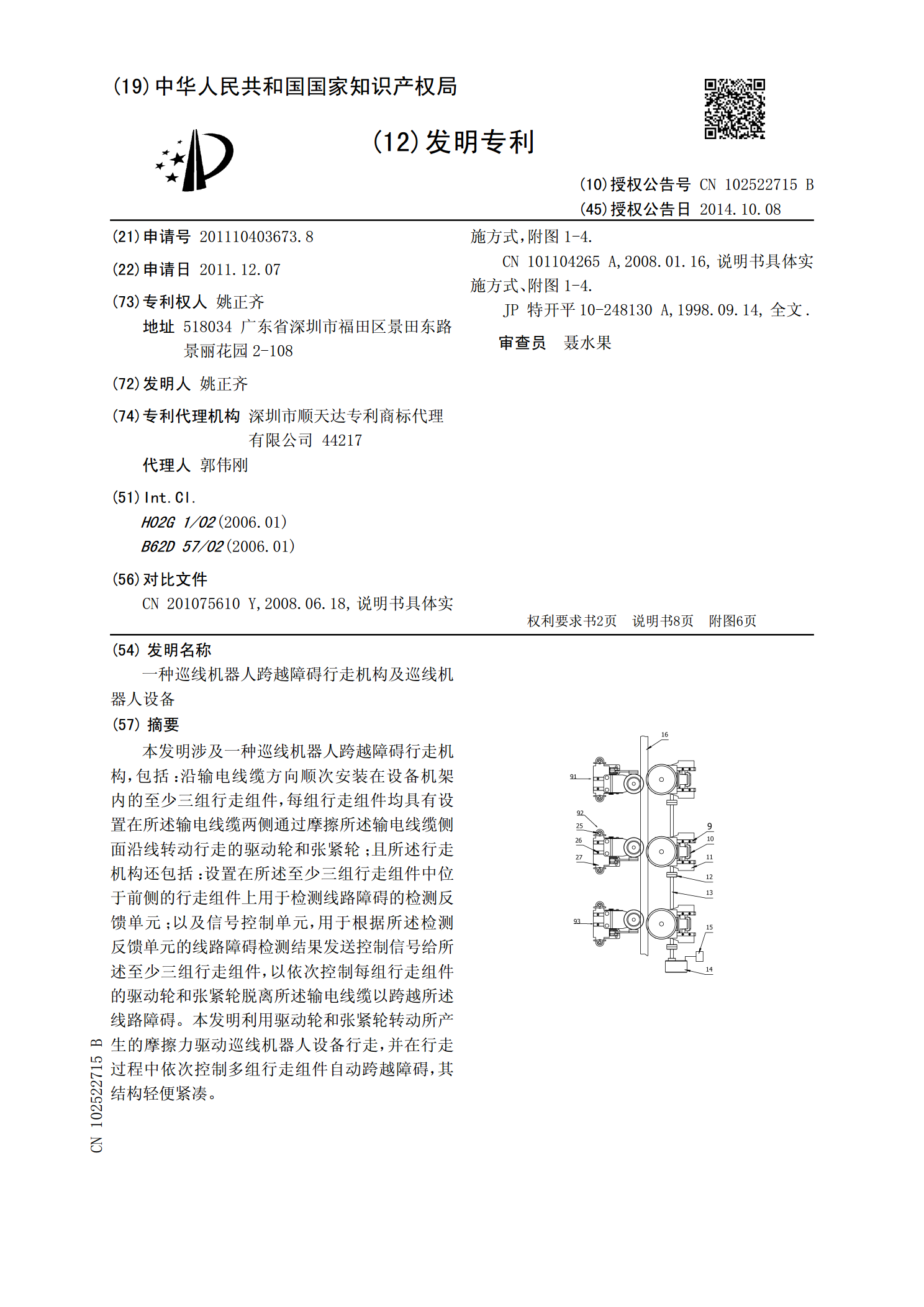
本发明涉及一种巡线机器人跨越障碍行走机构,包括:沿输电线缆方向顺次安装在设备机架内的至少三组行走组件,每组行走组件均具有设置在所述输电线缆两侧通过摩擦所述输电线缆侧面沿线转动行走的驱动轮和张紧轮;且所述行走机构还包括:设置在所述至少三组行走组件中位于前侧的行走组件上用于检测线路障碍的检测反馈单元;以及信号控制单元,用于根据所述检测反馈单元的线路障碍检测结果发送控制信号给所述至少三组行走组件,以依次控制每组行走组件的驱动轮和张紧轮脱离所述输电线缆以跨越所述线路障碍。本发明利用驱动轮和张紧轮转动所产生的摩擦力

一种巡线除冰机器人及其越障方法.pdf
本发明一种巡线除冰机器人及其越障方法,包括机体,在机体两侧分别设置有一个运动臂,所述运动臂的上端设置有主动轮和除冰轮,所述主动轮和除冰轮均连接驱动电机,所述主动轮通过推杆安装在除冰轮上方,主动轮和除冰轮之间架设待巡检线缆,机体的底板上安装有第一电机和第二电机,所述第一电机输出轴连接第一轴,第一轴外围套接有第二轴,所述第二轴与运动臂下端连接,底板上还安装有蓄电装置,机体前后部安装有探测器。机构运动简单、机械结构紧凑、质量轻、运动较灵活,能够自动越障,且轮式和臂式结合的运动方式可以使除冰和巡线的效率大大提高;