
一种农业智能采摘机器人.pdf

书生****35


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种农业智能采摘机器人.pdf
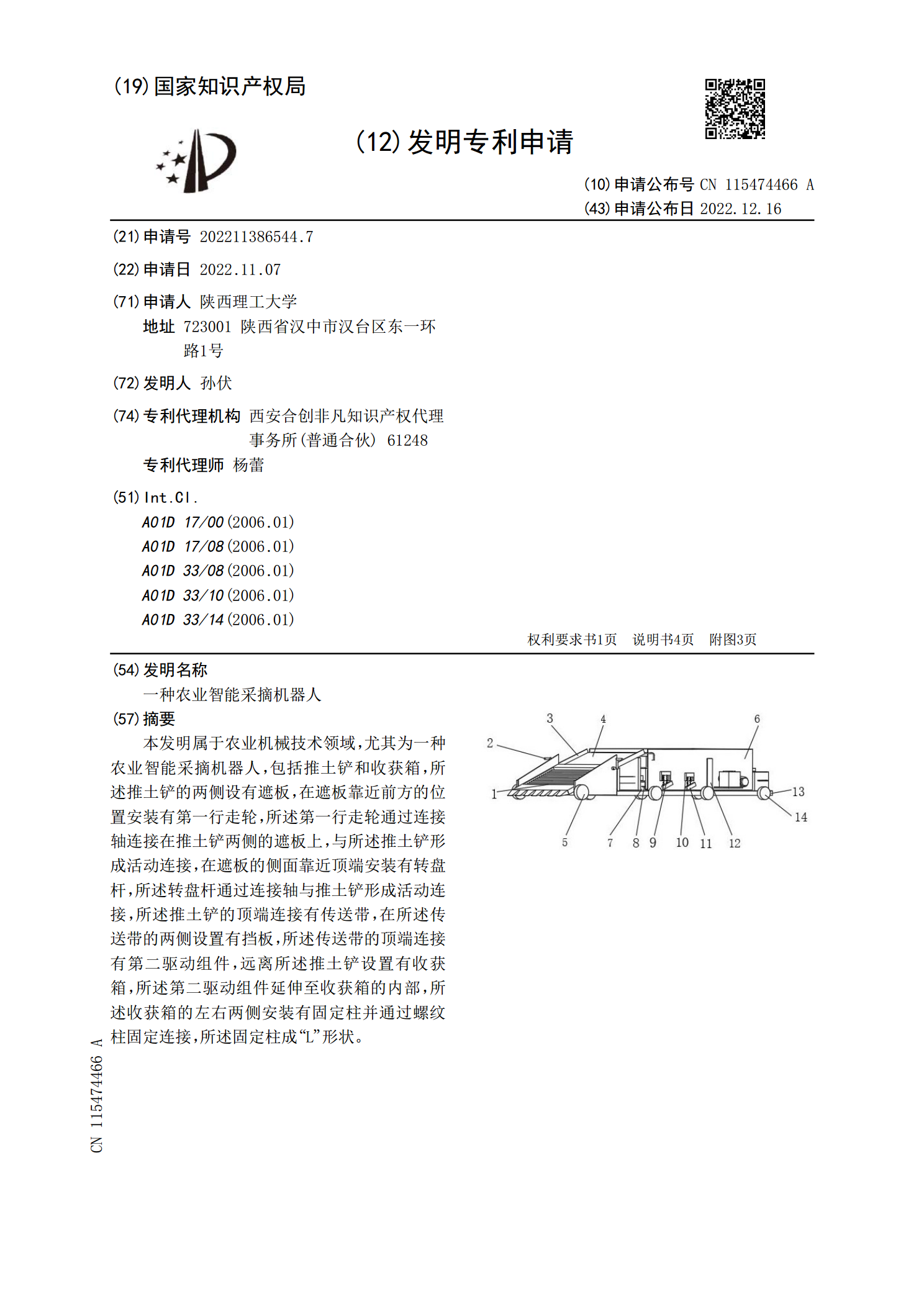
本发明属于农业机械技术领域,尤其为一种农业智能采摘机器人,包括推土铲和收获箱,所述推土铲的两侧设有遮板,在遮板靠近前方的位置安装有第一行走轮,所述第一行走轮通过连接轴连接在推土铲两侧的遮板上,与所述推土铲形成活动连接,在遮板的侧面靠近顶端安装有转盘杆,所述转盘杆通过连接轴与推土铲形成活动连接,所述推土铲的顶端连接有传送带,在所述传送带的两侧设置有挡板,所述传送带的顶端连接有第二驱动组件,远离所述推土铲设置有收获箱,所述第二驱动组件延伸至收获箱的内部,所述收获箱的左右两侧安装有固定柱并通过螺纹柱固定连接,所
一种智能花椒采摘机器人的采摘装置.pdf
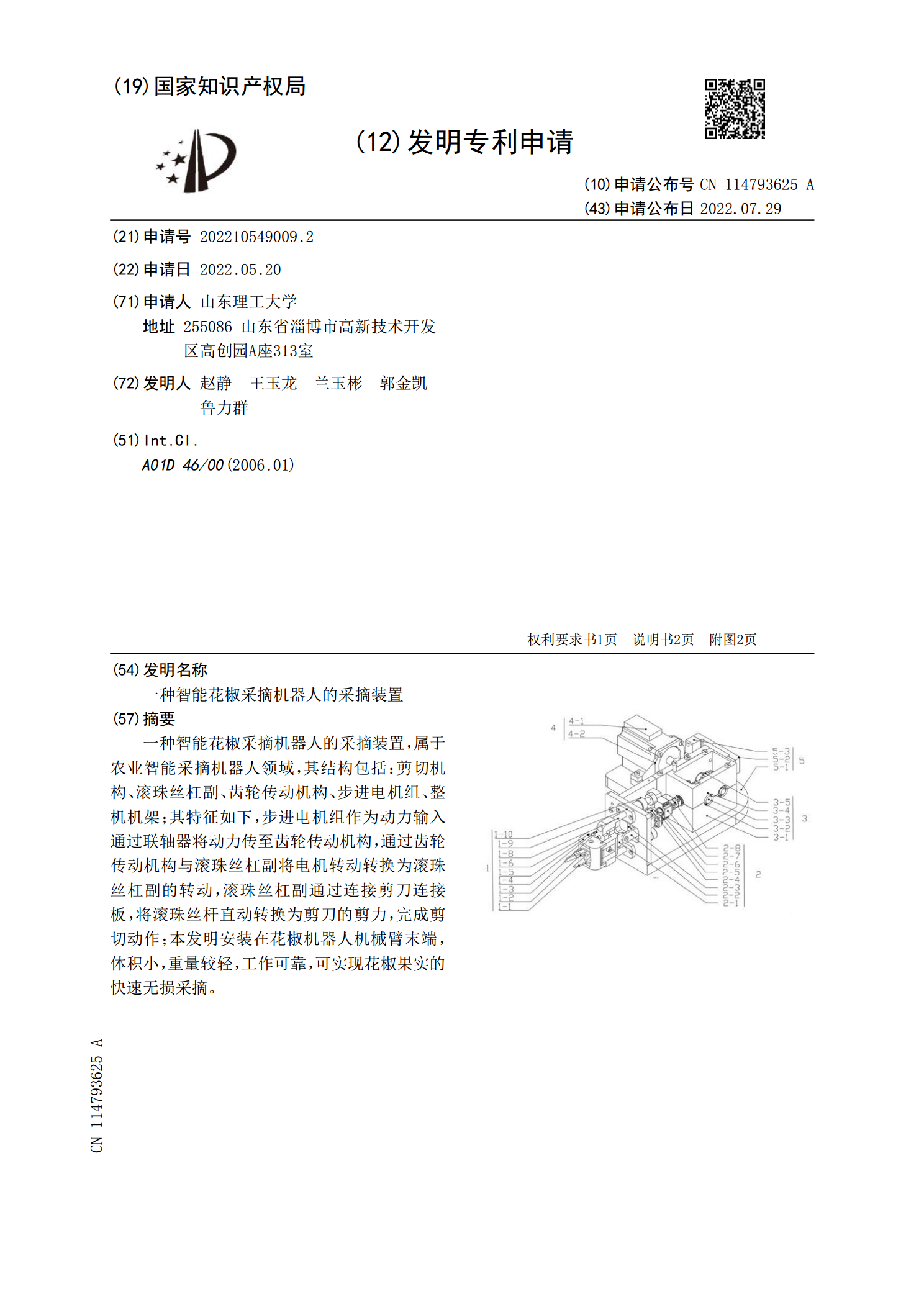
一种智能花椒采摘机器人的采摘装置,属于农业智能采摘机器人领域,其结构包括:剪切机构、滚珠丝杠副、齿轮传动机构、步进电机组、整机机架;其特征如下,步进电机组作为动力输入通过联轴器将动力传至齿轮传动机构,通过齿轮传动机构与滚珠丝杠副将电机转动转换为滚珠丝杠副的转动,滚珠丝杠副通过连接剪刀连接板,将滚珠丝杆直动转换为剪刀的剪力,完成剪切动作;本发明安装在花椒机器人机械臂末端,体积小,重量较轻,工作可靠,可实现花椒果实的快速无损采摘。

一种农业采摘机器人.pdf
本发明型公开了一种农业采摘机器人,包括履带移动部分、中控部分以及采摘部分组成的果蔬采摘机器人本体,所述果蔬采摘机器人本体上设有一对平行且高度相等的果蔬收集固定架,一对所述果蔬收集固定架之间连接有一对连接杆,所述收集固定架与连接杆下表面分别设有倒置的门形架,所述门形架的水平部分上表面相对两侧分别设有弹簧A,所述门形架相对两侧分别设有竖直槽,所述竖直槽内上表面设有向下的弹簧B,所述弹簧A上设有支撑板,所述果蔬收集固定架与连接杆之间形成矩形矩形空间,所述果蔬收集固定架与连接杆之间设有果蔬收集篮,所述果蔬收集篮呈

一种苹果采摘智能机器人.pdf
本发明提供一种苹果采摘智能机器人,包括四个采集单元,每个采集单元包括底板、伺服电机A、伺服电机B、车轮、立柱、斜板、伺服电机C、电缸A、圆柱杆,其特征在于:所述的底板是一块长方向平板,底板的四个角下方分别安装有一个竖直向下的伺服电机A,伺服电机A的电机轴端部下方安装有一个电机轴朝外的伺服电机B,伺服电机B的电机轴上安装有一个车轮,在底板的上方安装有一个立柱,立柱的上方是一个斜面,本发明可以通过四个活动的采集单元将苹果树围起来,通过摄像头可以观察苹果的位置,通过气动夹爪前端的刀片可以将苹果的根蒂处剪断,通过

一种智能蔬菜采摘机器人.pdf
本发明提供一种智能蔬菜采摘机器人,包括底板、车轮、直流电机、储物盒、横向导轨、第一伺服电机、第一电缸、横向滑块、第二伺服电机、第三伺服电机、纵向导轨,其特征在于:所述的底板是一块长方形平板,底板的四个角下部安装着四个直流电机,每个直流电机的电机轴上都安装着一个车轮,通过直流电机带动车轮旋转;在底板上方中央位置安装有一个第一伺服电机,通过设置两个可以开闭的半圆导轨,可以将植物的藤蔓置于整圆导轨的内部,方便气动夹爪沿着整圆导轨360°无死角采摘,每完成一个高度上的蔬菜采摘工作后,还可以通过纵向滑块进行下一个高