
一种苹果采摘智能机器人.pdf

新月****姐a


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种苹果采摘智能机器人.pdf
本发明提供一种苹果采摘智能机器人,包括四个采集单元,每个采集单元包括底板、伺服电机A、伺服电机B、车轮、立柱、斜板、伺服电机C、电缸A、圆柱杆,其特征在于:所述的底板是一块长方向平板,底板的四个角下方分别安装有一个竖直向下的伺服电机A,伺服电机A的电机轴端部下方安装有一个电机轴朝外的伺服电机B,伺服电机B的电机轴上安装有一个车轮,在底板的上方安装有一个立柱,立柱的上方是一个斜面,本发明可以通过四个活动的采集单元将苹果树围起来,通过摄像头可以观察苹果的位置,通过气动夹爪前端的刀片可以将苹果的根蒂处剪断,通过
一种苹果采摘机器人的采摘装置及其采摘方法.pdf
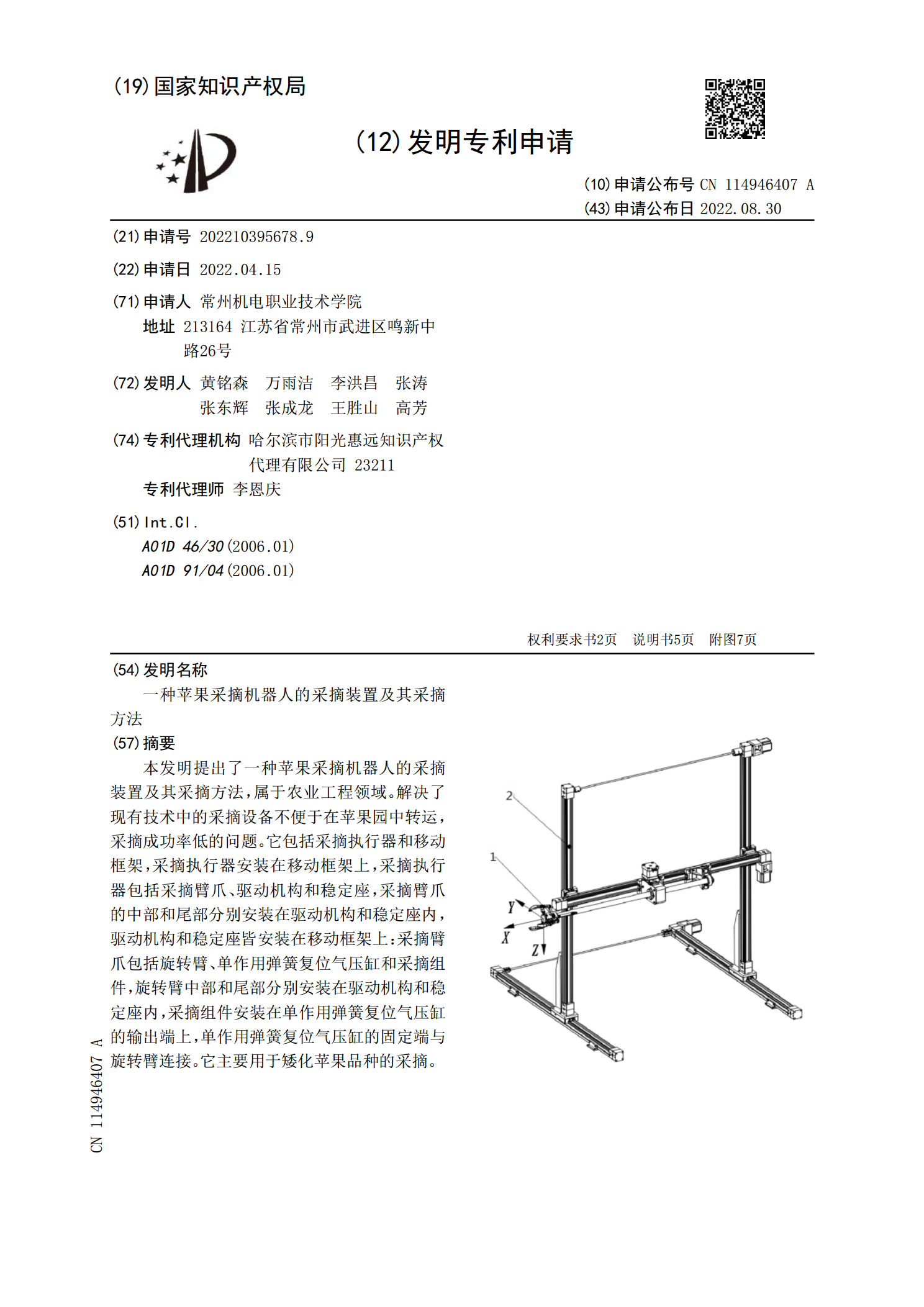
本发明提出了一种苹果采摘机器人的采摘装置及其采摘方法,属于农业工程领域。解决了现有技术中的采摘设备不便于在苹果园中转运,采摘成功率低的问题。它包括采摘执行器和移动框架,采摘执行器安装在移动框架上,采摘执行器包括采摘臂爪、驱动机构和稳定座,采摘臂爪的中部和尾部分别安装在驱动机构和稳定座内,驱动机构和稳定座皆安装在移动框架上:采摘臂爪包括旋转臂、单作用弹簧复位气压缸和采摘组件,旋转臂中部和尾部分别安装在驱动机构和稳定座内,采摘组件安装在单作用弹簧复位气压缸的输出端上,单作用弹簧复位气压缸的固定端与旋转臂连接。

一种苹果采摘机器人.pdf
本发明公开了一种苹果采摘机器人,包括机器人主体、多级调节臂、调节装置、手爪和分拣装置;所述机器人主体一端垂直设置有电动推杆,另一端前方设置有分拣装置;机器人主体下面设置有履带行走装置;所述电动推杆上面设置有扭转舵机;所述扭转舵机上面设置有调节装置和多级调节臂;所述多级调节臂上端设置有手爪和用于驱动手爪的第二步进电机;所述分拣装置上面设置有收集盒,下面设置有滚轮;所述收集盒上设置有固定到电动推杆上,且开口向上的传送管道。本发明结构设计合理,对高处的苹果进行采摘、分拣、收集一体化作业,提高了收集和后期分拣的效
一种智能花椒采摘机器人的采摘装置.pdf
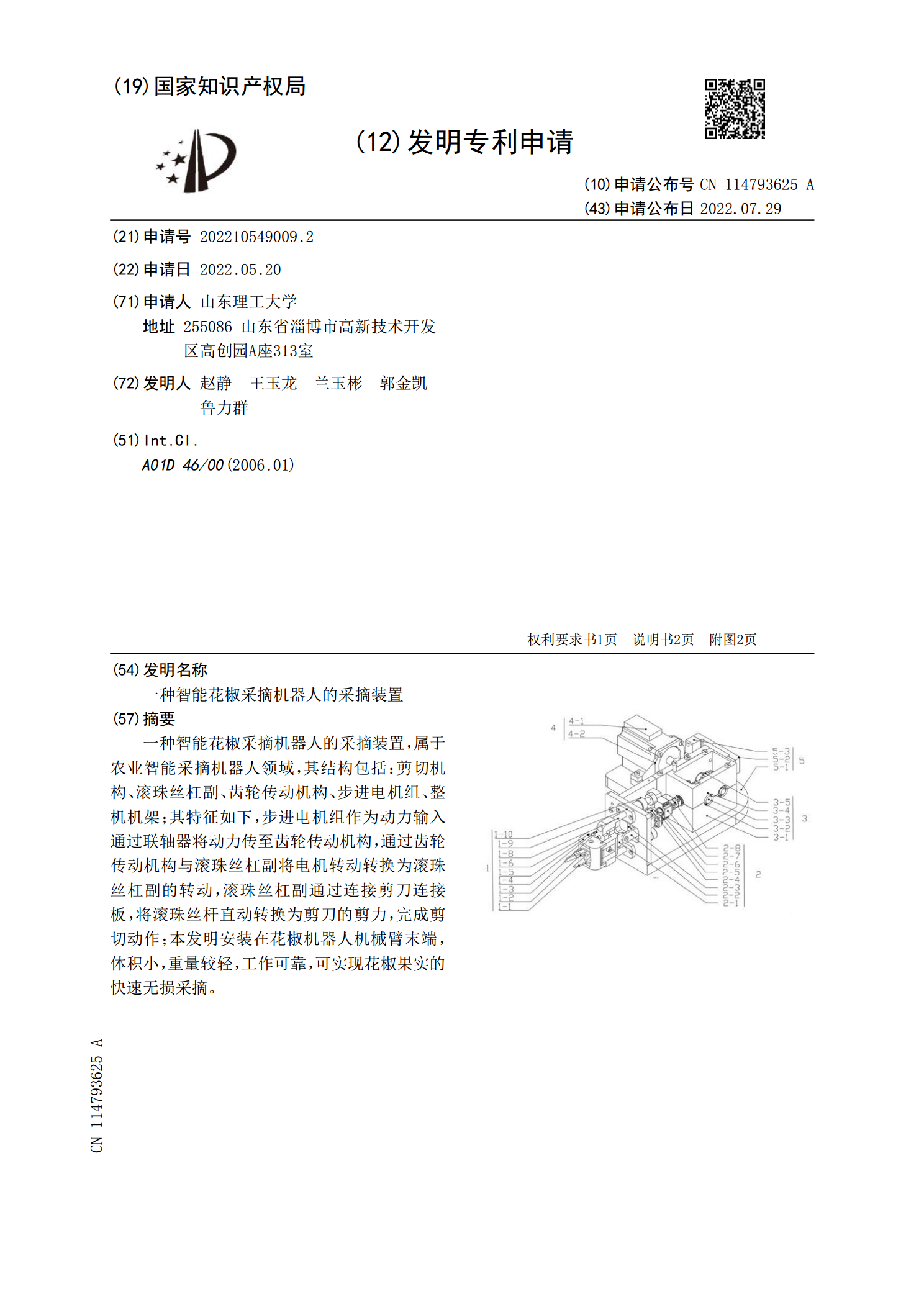
一种智能花椒采摘机器人的采摘装置,属于农业智能采摘机器人领域,其结构包括:剪切机构、滚珠丝杠副、齿轮传动机构、步进电机组、整机机架;其特征如下,步进电机组作为动力输入通过联轴器将动力传至齿轮传动机构,通过齿轮传动机构与滚珠丝杠副将电机转动转换为滚珠丝杠副的转动,滚珠丝杠副通过连接剪刀连接板,将滚珠丝杆直动转换为剪刀的剪力,完成剪切动作;本发明安装在花椒机器人机械臂末端,体积小,重量较轻,工作可靠,可实现花椒果实的快速无损采摘。
一种苹果采摘机器人手部结构.pdf
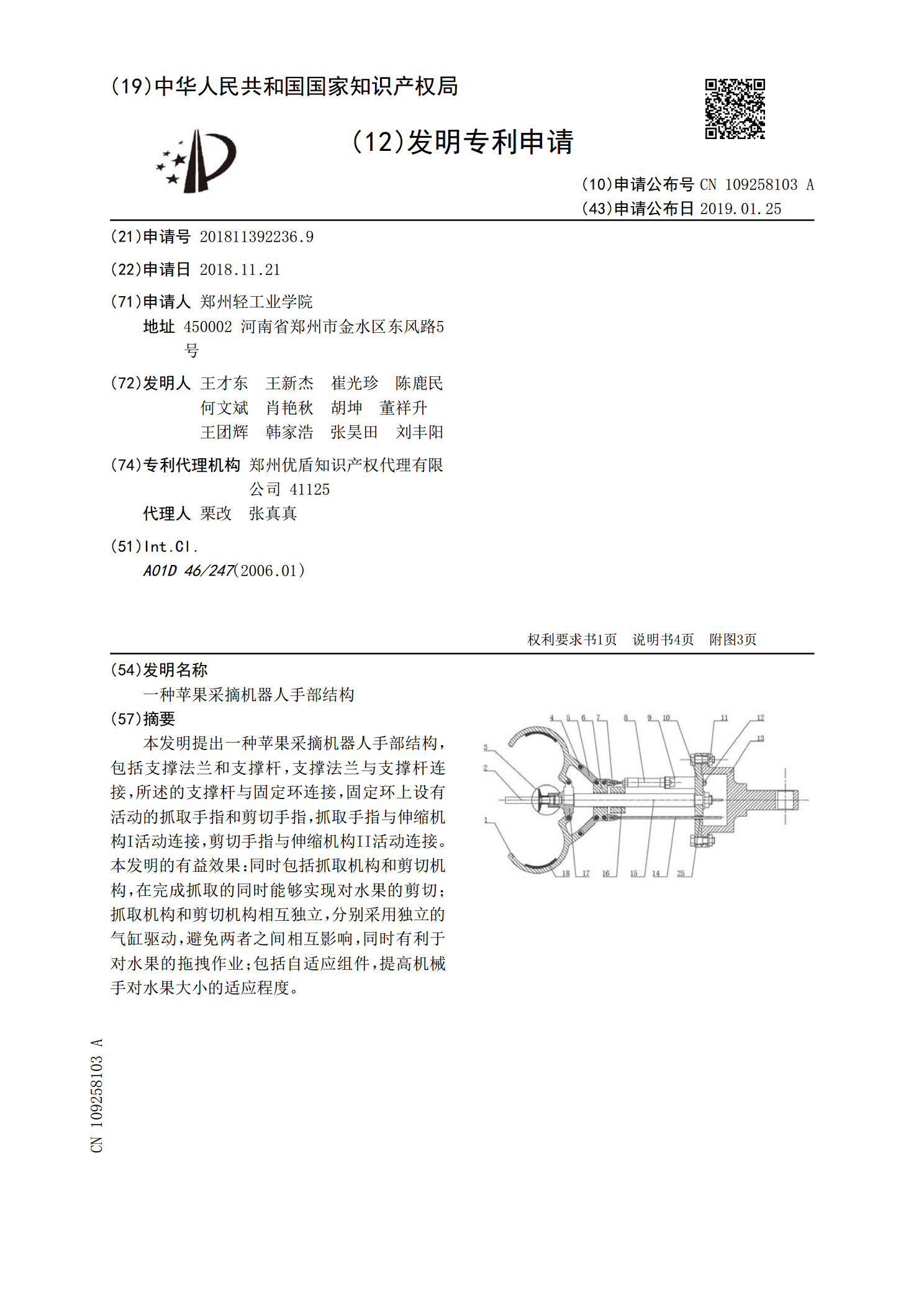
本发明提出一种苹果采摘机器人手部结构,包括支撑法兰和支撑杆,支撑法兰与支撑杆连接,所述的支撑杆与固定环连接,固定环上设有活动的抓取手指和剪切手指,抓取手指与伸缩机构I活动连接,剪切手指与伸缩机构II活动连接。本发明的有益效果:同时包括抓取机构和剪切机构,在完成抓取的同时能够实现对水果的剪切;抓取机构和剪切机构相互独立,分别采用独立的气缸驱动,避免两者之间相互影响,同时有利于对水果的拖拽作业;包括自适应组件,提高机械手对水果大小的适应程度。