
一种新型柔臂掘进机推进系统控制计算方法.pdf

Jo****63


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种新型柔臂掘进机推进系统控制计算方法.pdf
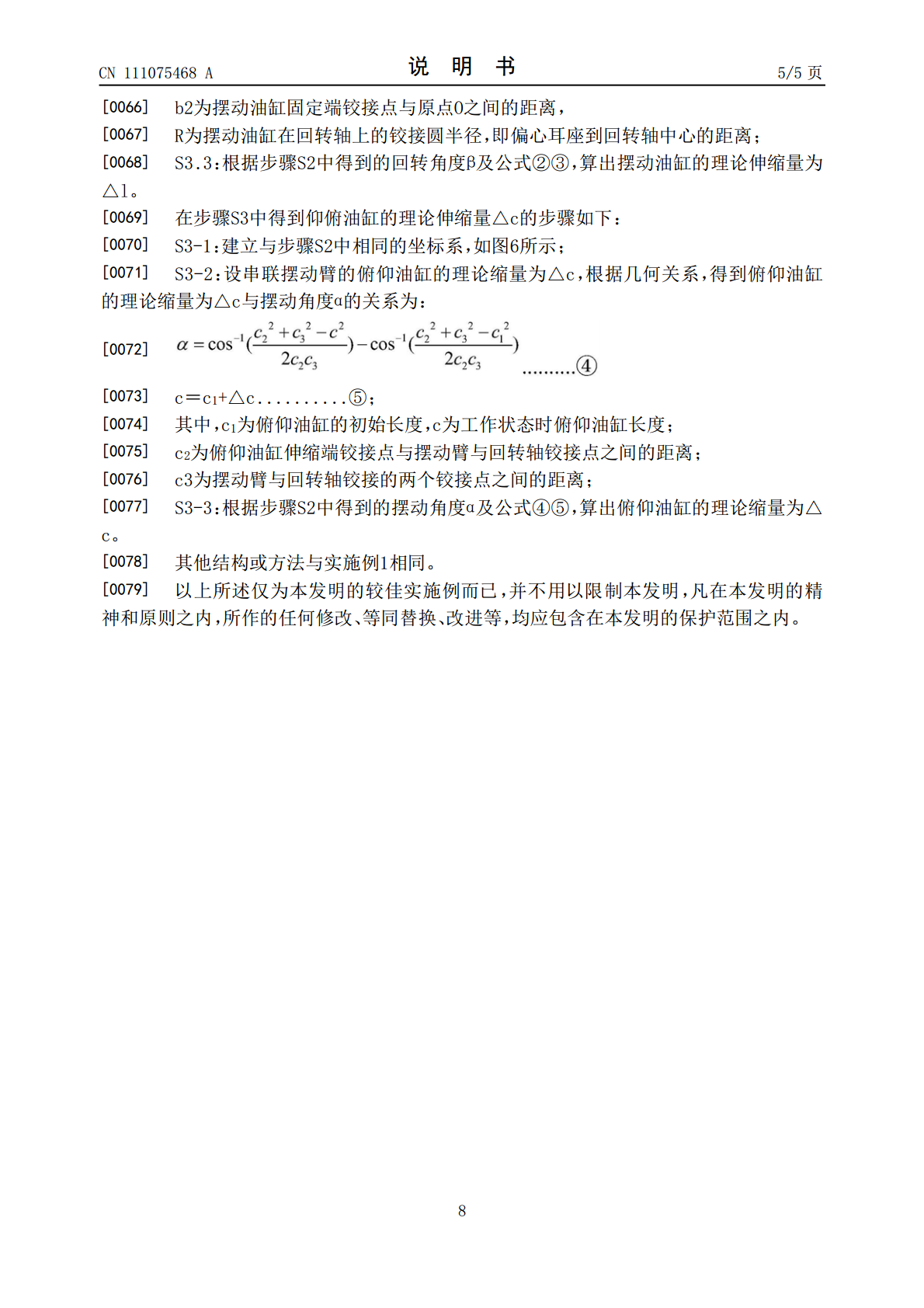
本发明公开了一种新型柔臂掘进机推进系统控制计算方法,包括如下步骤:S1:根据预先设计的隧道轮廓边界和刀盘直径,规划出刀盘掘进路径;S2:对刀盘掘进路径进行离散化处理,得到轨迹路径坐标数据,根据轨迹路径坐标数据算出串联摆动臂相应的回转角度及相应的摆动角度;S3:根据步骤S2中得到串联摆动臂相应的回转角度及相应的摆动角度,计算出串联摆动臂的摆动油缸的理论伸缩量及仰俯油缸的理论伸缩量;S4:对串联摆动臂的摆动油缸的理论伸缩量与摆动油缸中的位移传感器实测的实际伸缩量进行对比、然后修正。本发明为控制串联摆动臂的动作
一种柔臂掘进机.pdf
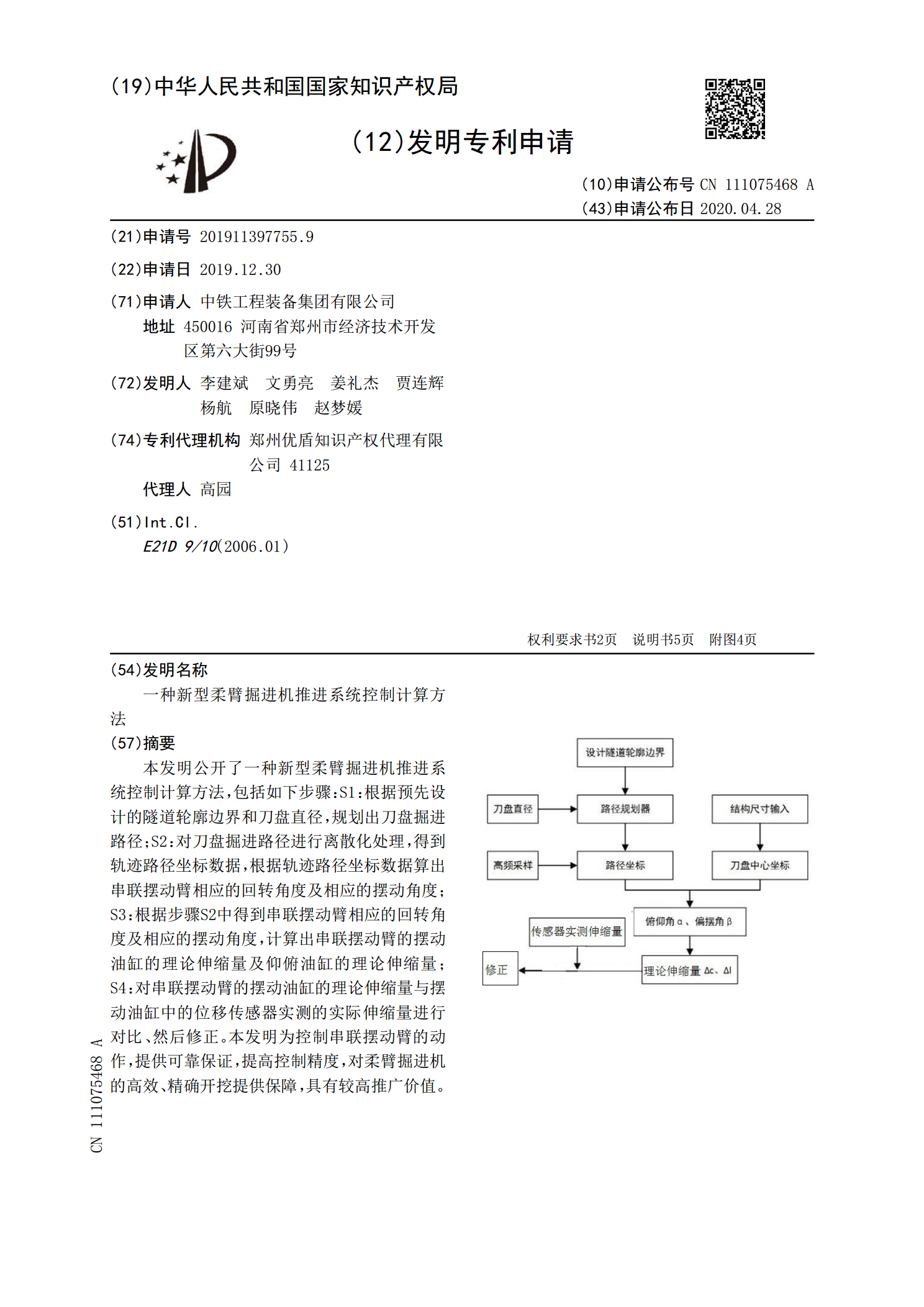
本实用新型提供了一种柔臂掘进机,含有刀盘(1)、柔臂(3)和车体(4),车体(4)的前部设有前工作机构(41),刀盘(1)通过柔臂(3)与前工作机构(41)连接,前工作机构(41)能够相对于车体(4)前后移动,柔臂(3)能够使刀盘(1)相对于前工作机构(41)具有六个自由度。该柔臂掘进机可以满足硬岩自由断面隧道的开挖需求,开挖能力强,工作效率高。
一种新型柔臂TBM.pdf
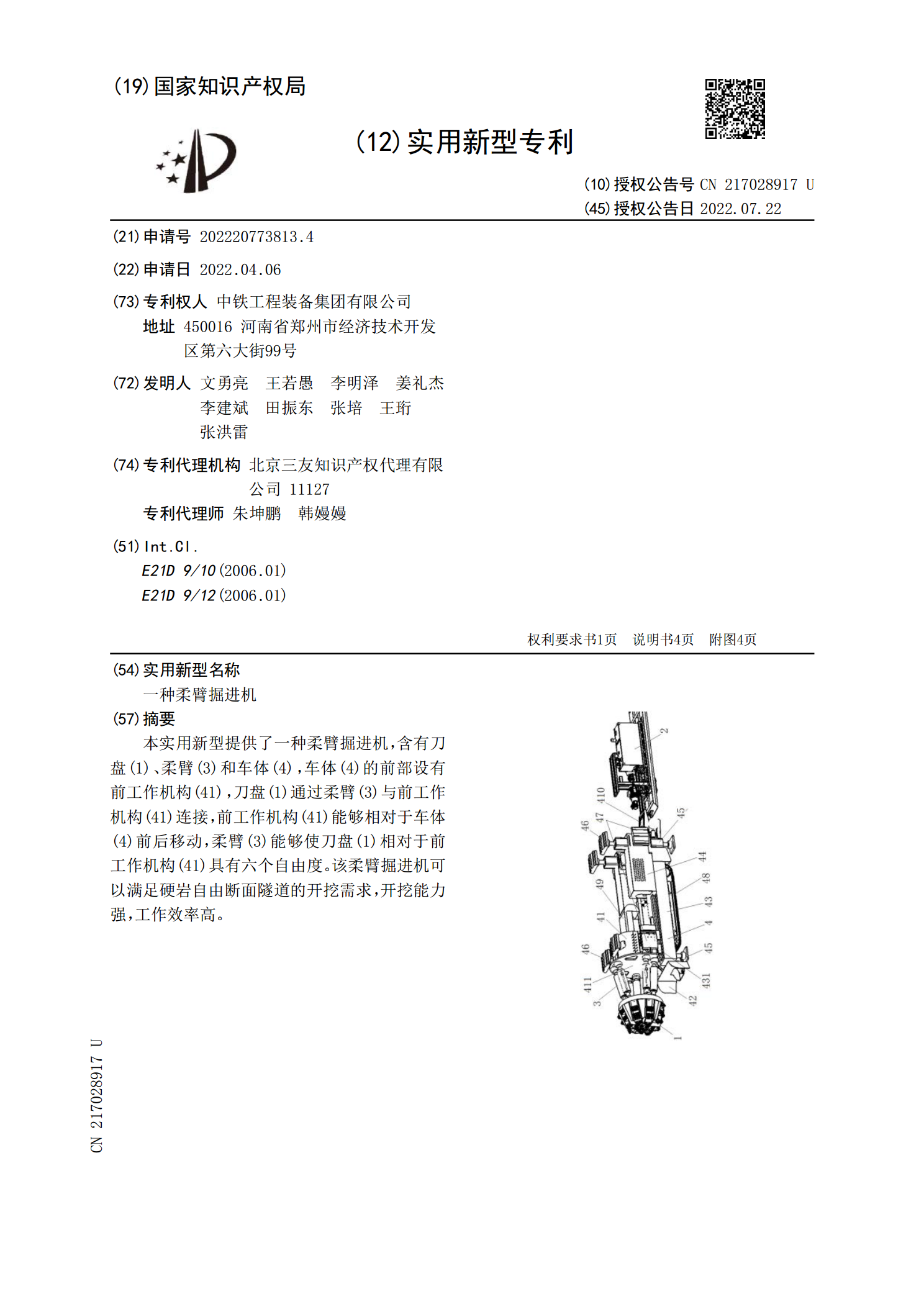
本实用新型公开了一种新型柔臂TBM,解决了现有技术中柔臂掘进机掘进效率低的问题。本实用新型的技术方案包括刀盘掘进系统、主梁撑护系统和出渣系统,刀盘掘进系统设置在主梁撑护系统的前部,出渣系统位于主梁撑护系统上且与刀盘掘进系统相对应,所述刀盘掘进系统包括旋切刀盘和并联油缸臂,并联油缸臂的一端与旋切刀盘相连接、另一端通过回转机构与主梁撑护系统转动连接。本实用新型刀盘掘进系统的旋切刀盘在破岩方式上,既有正滚刀又有在固定刀筒轴向布置有多把旋切的侧滚刀,当带动刀盘运动的并联油缸臂完全缩回时,柔臂掘进机以正滚刀压裂破岩

一种新型摆动式柔臂TBM.pdf
本实用新型公开了一种新型摆动式柔臂TBM,解决了现有技术中柔臂掘进机掘进效率低的问题。本实用新型包括刀盘掘进系统、主梁撑护系统和出渣系统,刀盘掘进系统设置在主梁撑护系统的前部,出渣系统位于主梁撑护系统上且与刀盘掘进系统相对应,刀盘掘进系统包括旋切刀盘和摆动伸缩臂,摆动伸缩臂的一端与旋切刀盘相连接、另一端通过摆动机构与主梁撑护系统转动连接。本实用新型刀盘掘进系统的旋切刀盘在破岩方式上,既有正滚刀又有在固定刀筒轴向布置有多把旋切的侧滚刀,当摆动油缸配合俯仰油缸使旋切刀正面顶紧掌子面时,柔臂掘进机以正滚刀压裂破

一种新型摆动式柔臂TBM及其掘进方法.pdf
本发明公开了一种新型摆动式柔臂TBM及其掘进方法,解决了现有技术中柔臂掘进机掘进效率低的问题。本发明包括刀盘掘进系统、主梁撑护系统和出渣系统,刀盘掘进系统设置在主梁撑护系统的前部,出渣系统位于主梁撑护系统上且与刀盘掘进系统相对应,刀盘掘进系统包括旋切刀盘和摆动伸缩臂,摆动伸缩臂的一端与旋切刀盘相连接、另一端通过摆动机构与主梁撑护系统转动连接。本发明刀盘掘进系统的旋切刀盘在破岩方式上,既有正滚刀又有在固定刀筒轴向布置有多把旋切的侧滚刀,当摆动油缸配合俯仰油缸使旋切刀正面顶紧掌子面时,柔臂掘进机以正滚刀压裂破