
基于感知数据的车载多目测距设备标定校准方法及系统.pdf

努力****晓骞

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于感知数据的车载多目测距设备标定校准方法及系统.pdf
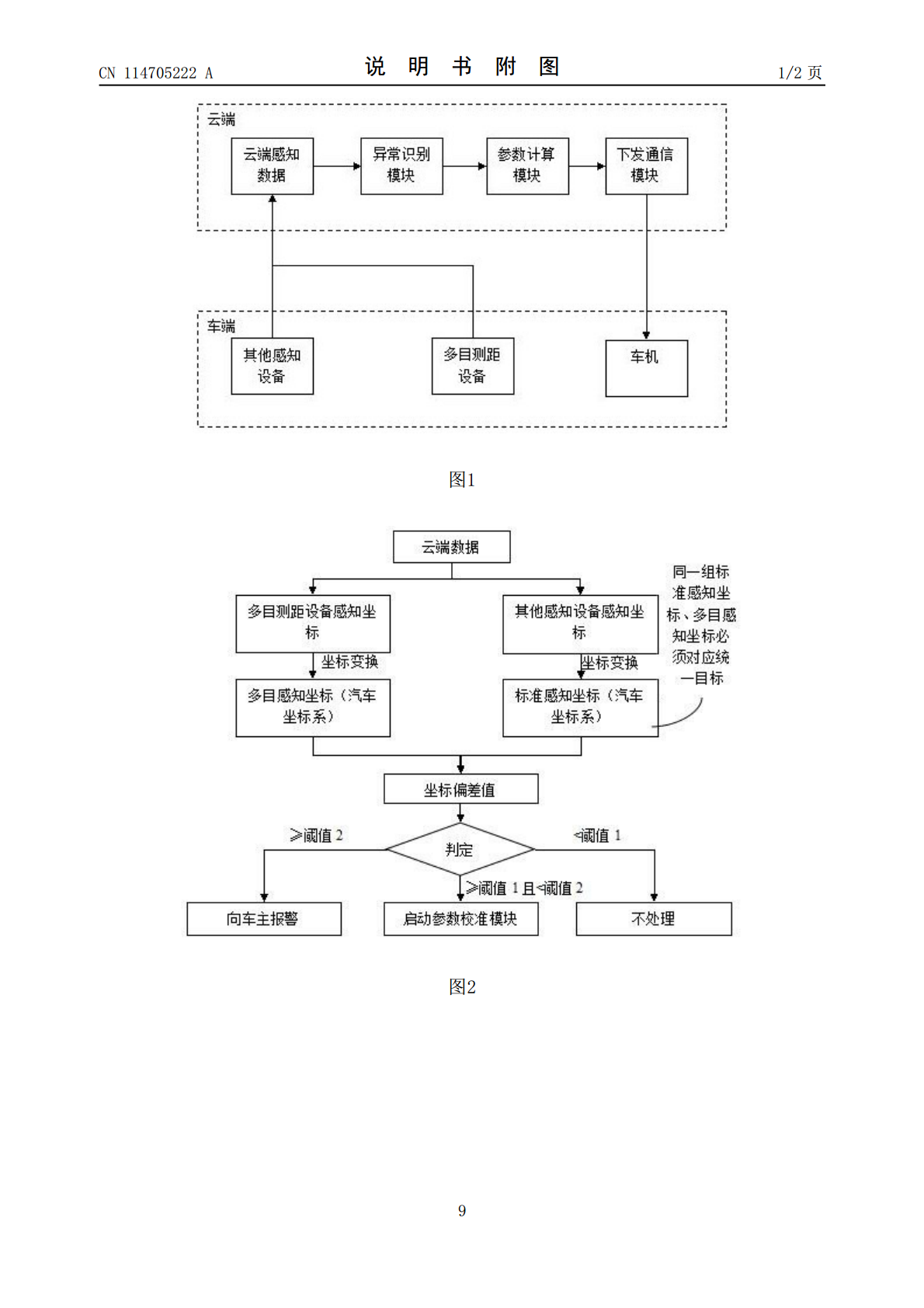
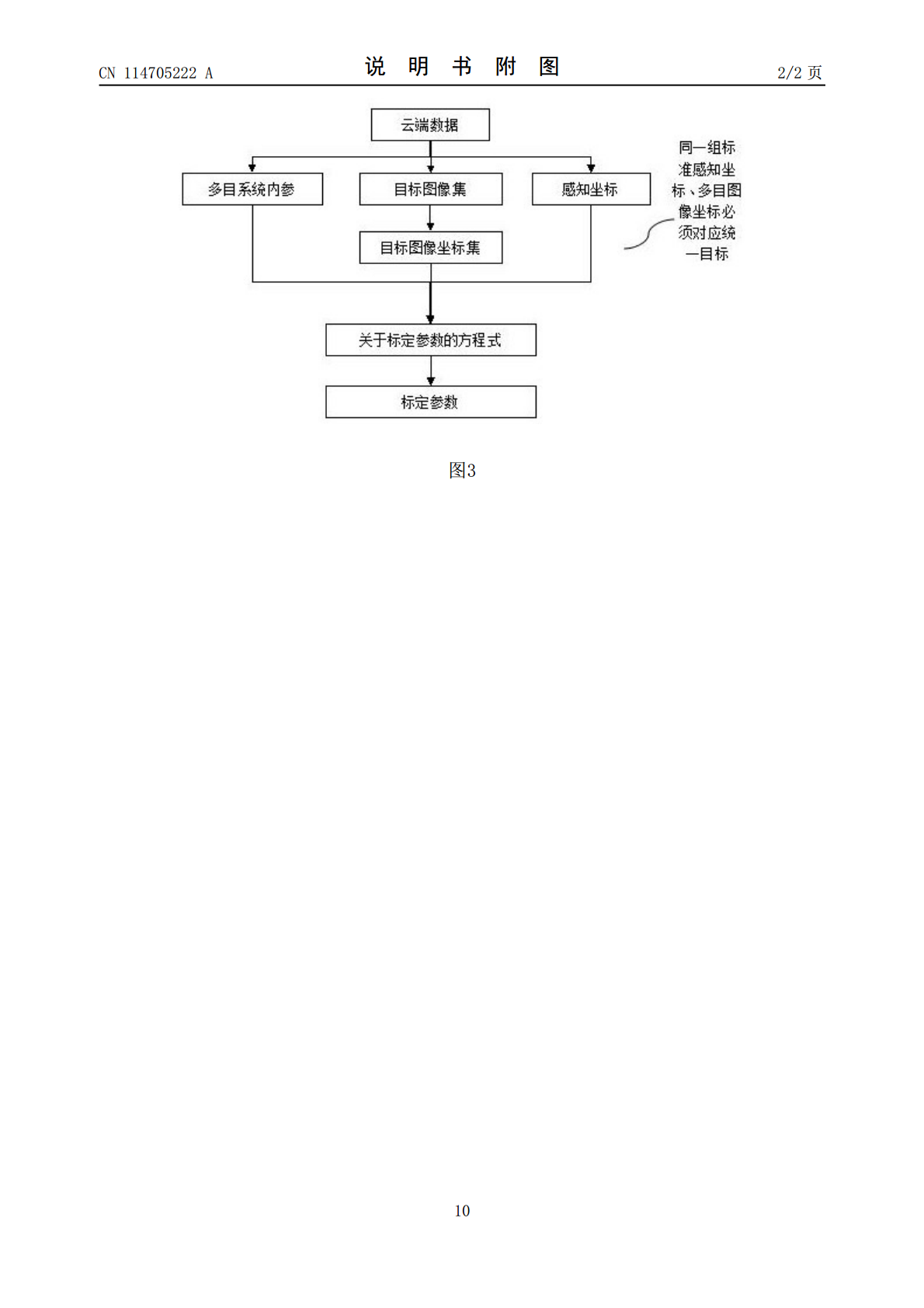
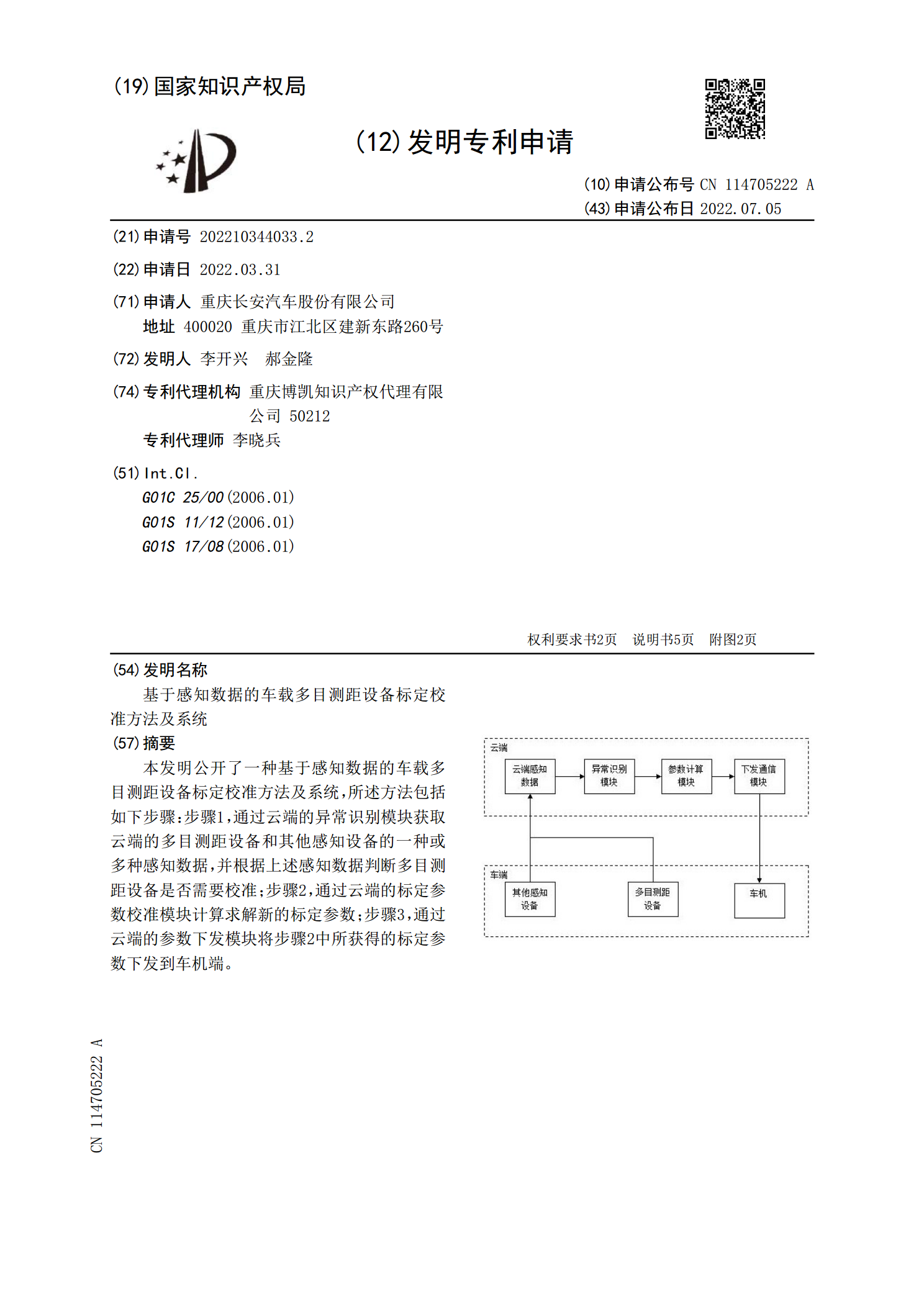
本发明公开了一种基于感知数据的车载多目测距设备标定校准方法及系统,所述方法包括如下步骤:步骤1,通过云端的异常识别模块获取云端的多目测距设备和其他感知设备的一种或多种感知数据,并根据上述感知数据判断多目测距设备是否需要校准;步骤2,通过云端的标定参数校准模块计算求解新的标定参数;步骤3,通过云端的参数下发模块将步骤2中所获得的标定参数下发到车机端。
基于单目摄像头的测距方法、车载测距设备以及存储介质.pdf
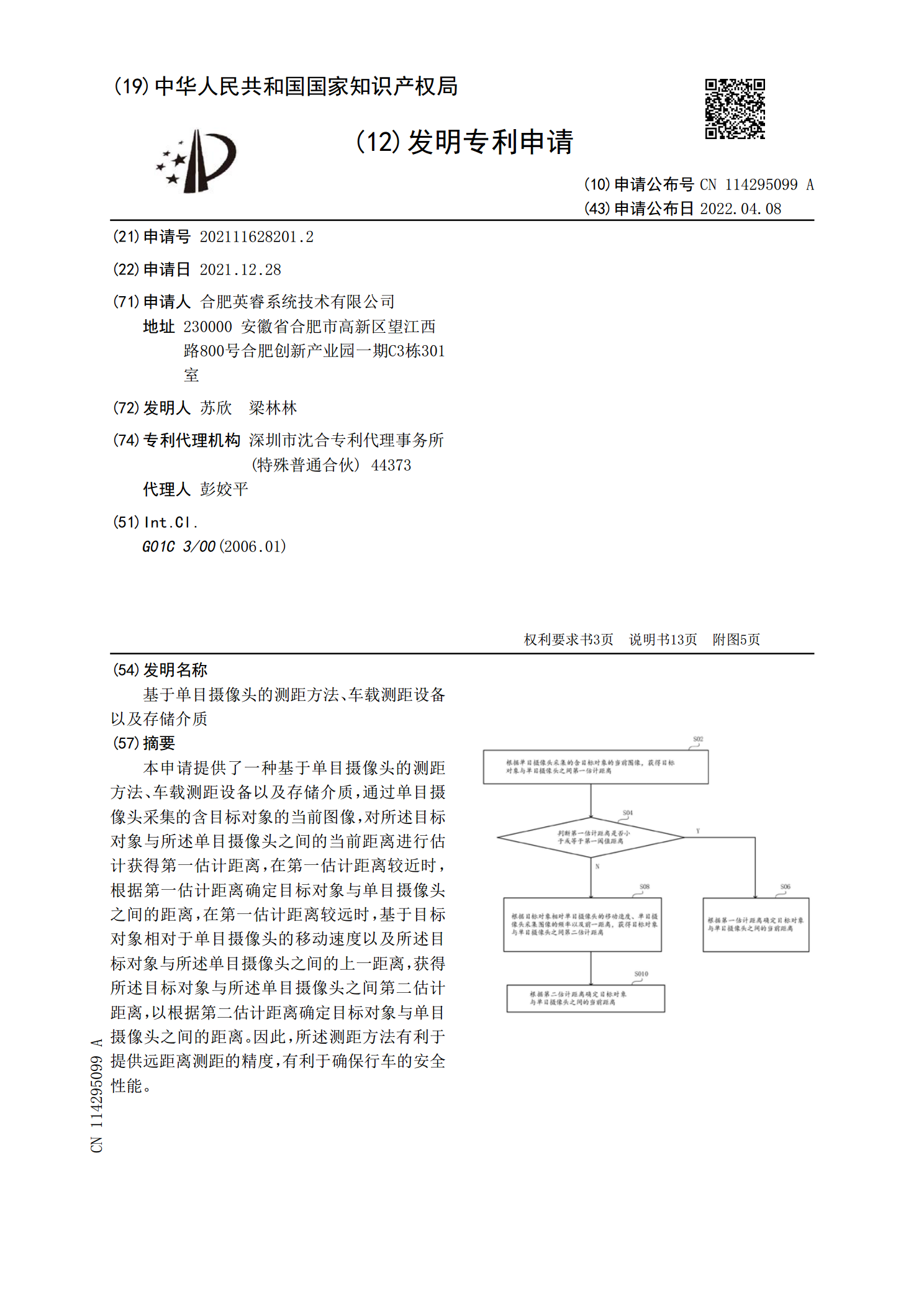
本申请提供了一种基于单目摄像头的测距方法、车载测距设备以及存储介质,通过单目摄像头采集的含目标对象的当前图像,对所述目标对象与所述单目摄像头之间的当前距离进行估计获得第一估计距离,在第一估计距离较近时,根据第一估计距离确定目标对象与单目摄像头之间的距离,在第一估计距离较远时,基于目标对象相对于单目摄像头的移动速度以及所述目标对象与所述单目摄像头之间的上一距离,获得所述目标对象与所述单目摄像头之间第二估计距离,以根据第二估计距离确定目标对象与单目摄像头之间的距离。因此,所述测距方法有利于提供远距离测距的精度
一种车载HUD的校准标定系统及方法.pdf
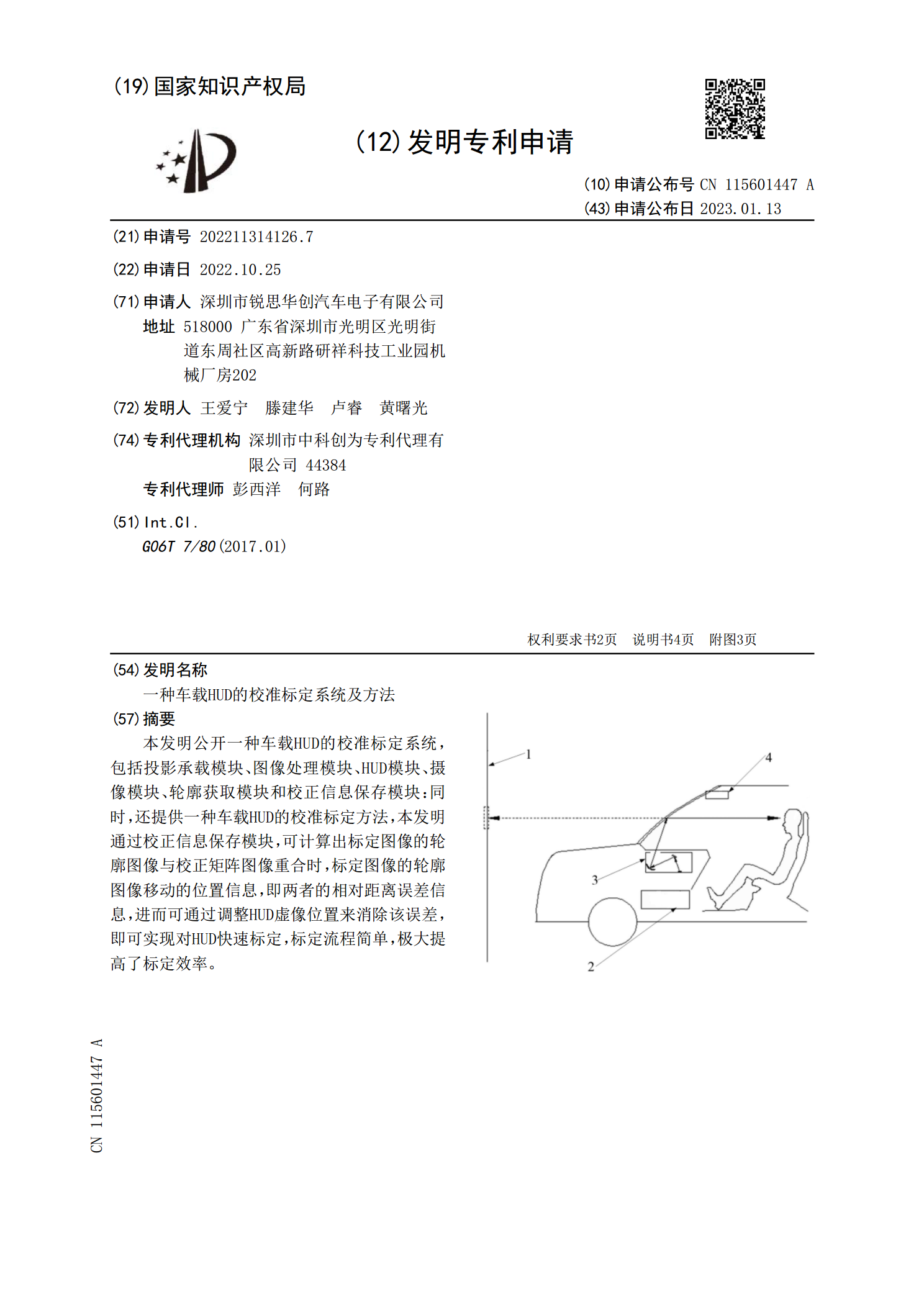
本发明公开一种车载HUD的校准标定系统,包括投影承载模块、图像处理模块、HUD模块、摄像模块、轮廓获取模块和校正信息保存模块:同时,还提供一种车载HUD的校准标定方法,本发明通过校正信息保存模块,可计算出标定图像的轮廓图像与校正矩阵图像重合时,标定图像的轮廓图像移动的位置信息,即两者的相对距离误差信息,进而可通过调整HUD虚像位置来消除该误差,即可实现对HUD快速标定,标定流程简单,极大提高了标定效率。
车载激光雷达数据校准方法、装置及系统.pdf
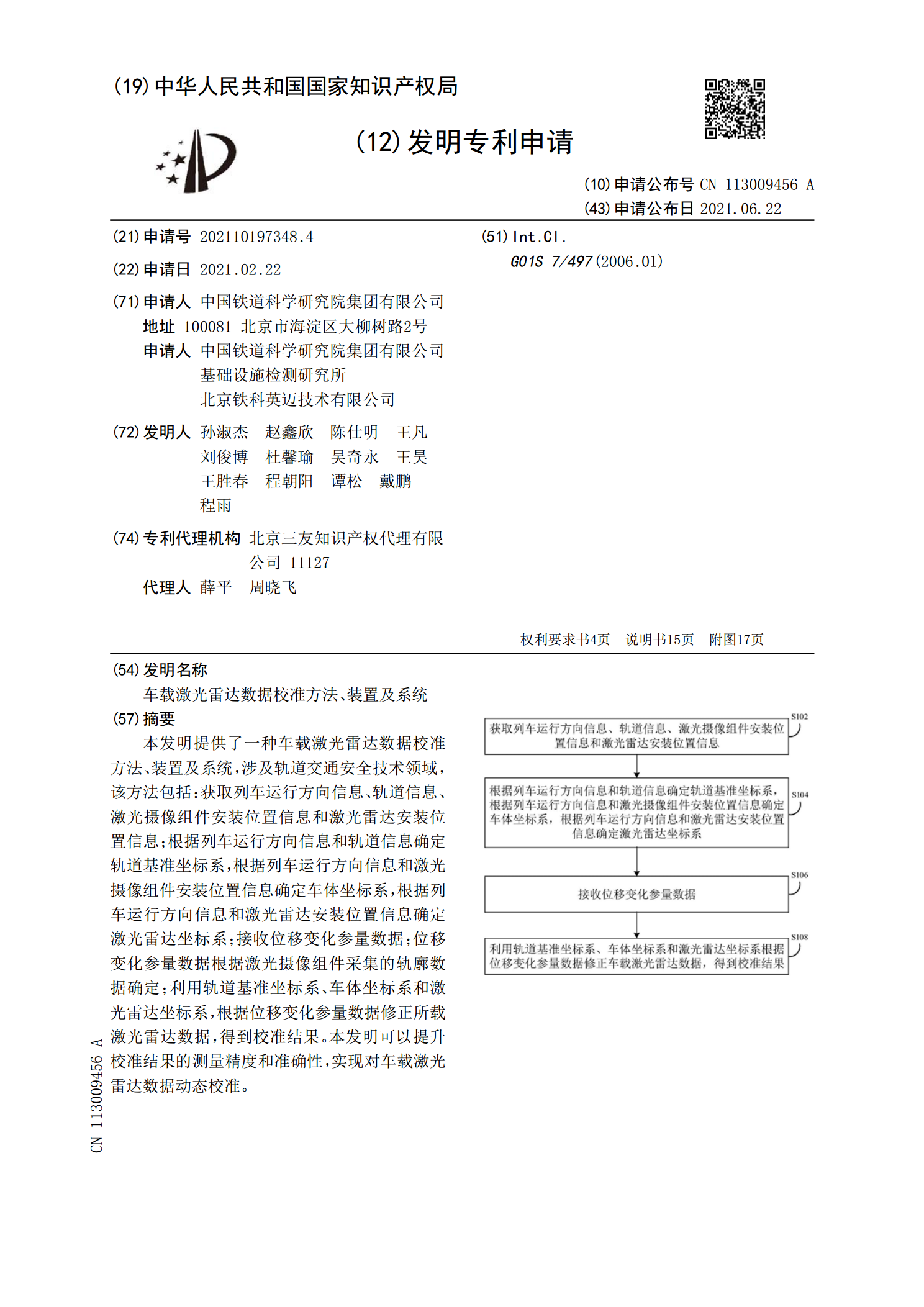
本发明提供了一种车载激光雷达数据校准方法、装置及系统,涉及轨道交通安全技术领域,该方法包括:获取列车运行方向信息、轨道信息、激光摄像组件安装位置信息和激光雷达安装位置信息;根据列车运行方向信息和轨道信息确定轨道基准坐标系,根据列车运行方向信息和激光摄像组件安装位置信息确定车体坐标系,根据列车运行方向信息和激光雷达安装位置信息确定激光雷达坐标系;接收位移变化参量数据;位移变化参量数据根据激光摄像组件采集的轨廓数据确定;利用轨道基准坐标系、车体坐标系和激光雷达坐标系,根据位移变化参量数据修正所载激光雷达数据,
基于道路特征的多目相机标定方法、装置、设备和介质.pdf
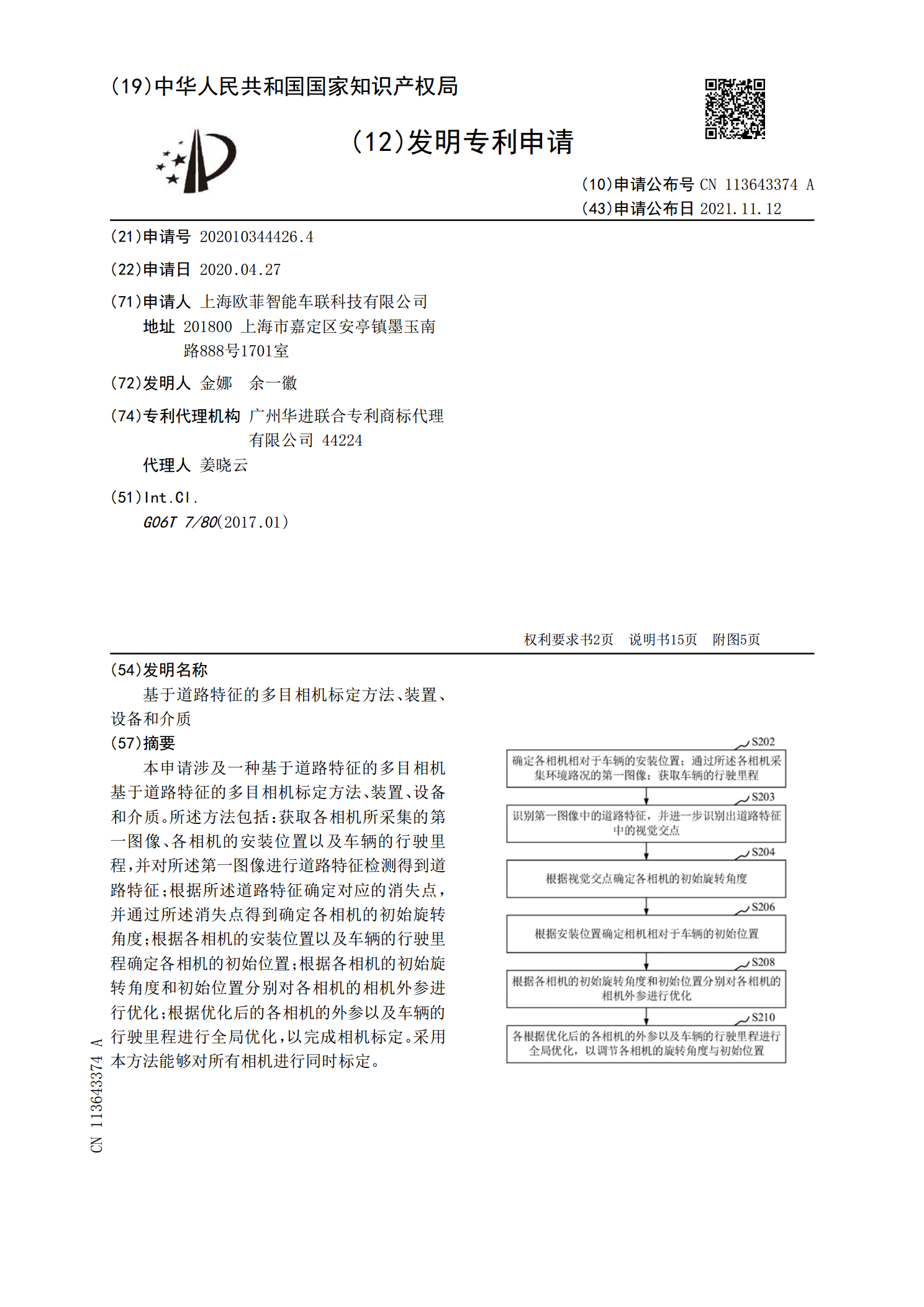
本申请涉及一种基于道路特征的多目相机基于道路特征的多目相机标定方法、装置、设备和介质。所述方法包括:获取各相机所采集的第一图像、各相机的安装位置以及车辆的行驶里程,并对所述第一图像进行道路特征检测得到道路特征;根据所述道路特征确定对应的消失点,并通过所述消失点得到确定各相机的初始旋转角度;根据各相机的安装位置以及车辆的行驶里程确定各相机的初始位置;根据各相机的初始旋转角度和初始位置分别对各相机的相机外参进行优化;根据优化后的各相机的外参以及车辆的行驶里程进行全局优化,以完成相机标定。采用本方法能够对所有相