
基于单目摄像头的测距方法、车载测距设备以及存储介质.pdf

努力****元恺

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于单目摄像头的测距方法、车载测距设备以及存储介质.pdf
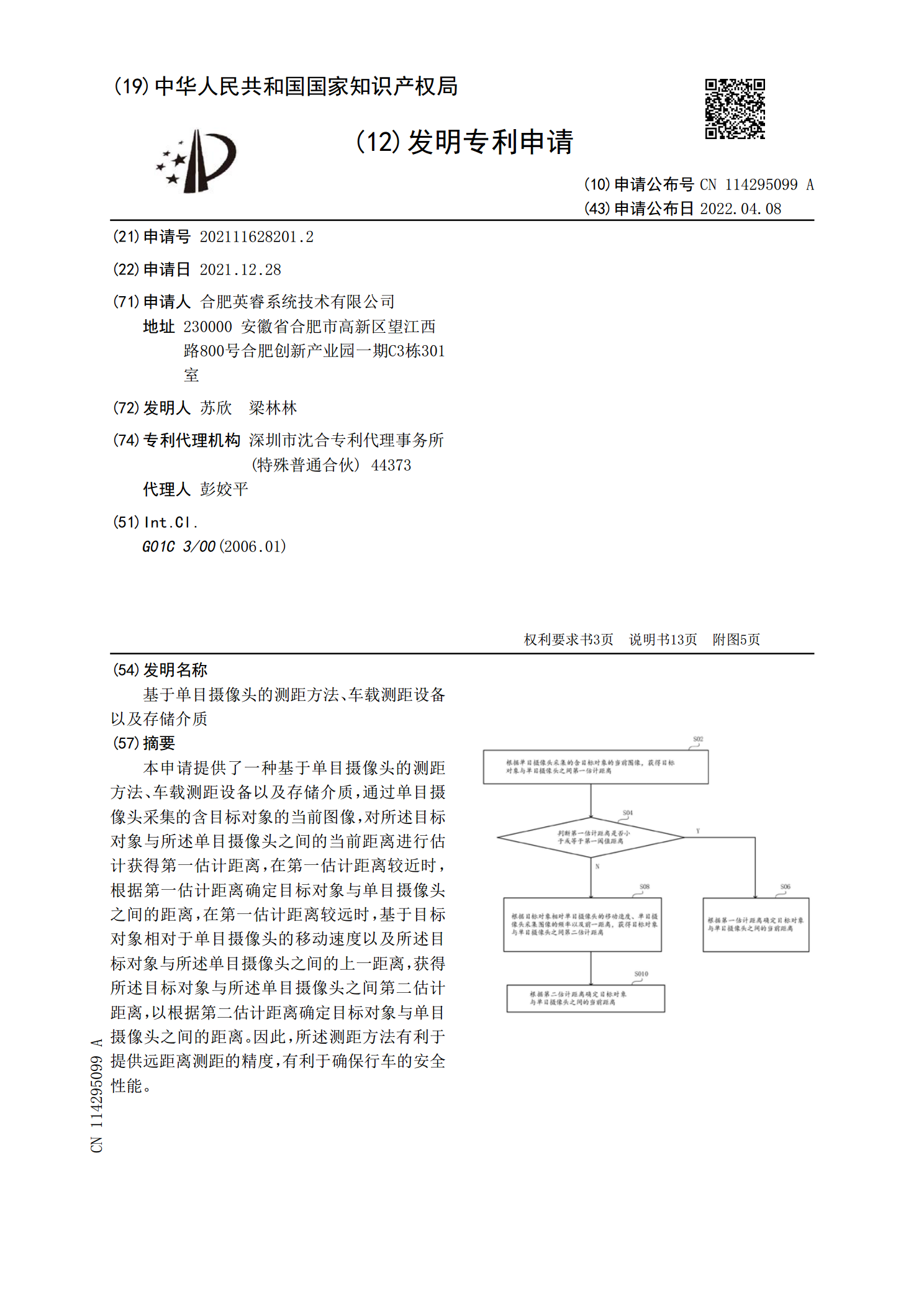
本申请提供了一种基于单目摄像头的测距方法、车载测距设备以及存储介质,通过单目摄像头采集的含目标对象的当前图像,对所述目标对象与所述单目摄像头之间的当前距离进行估计获得第一估计距离,在第一估计距离较近时,根据第一估计距离确定目标对象与单目摄像头之间的距离,在第一估计距离较远时,基于目标对象相对于单目摄像头的移动速度以及所述目标对象与所述单目摄像头之间的上一距离,获得所述目标对象与所述单目摄像头之间第二估计距离,以根据第二估计距离确定目标对象与单目摄像头之间的距离。因此,所述测距方法有利于提供远距离测距的精度
激光测距的方法、装置、激光测距设备及可读存储介质.pdf
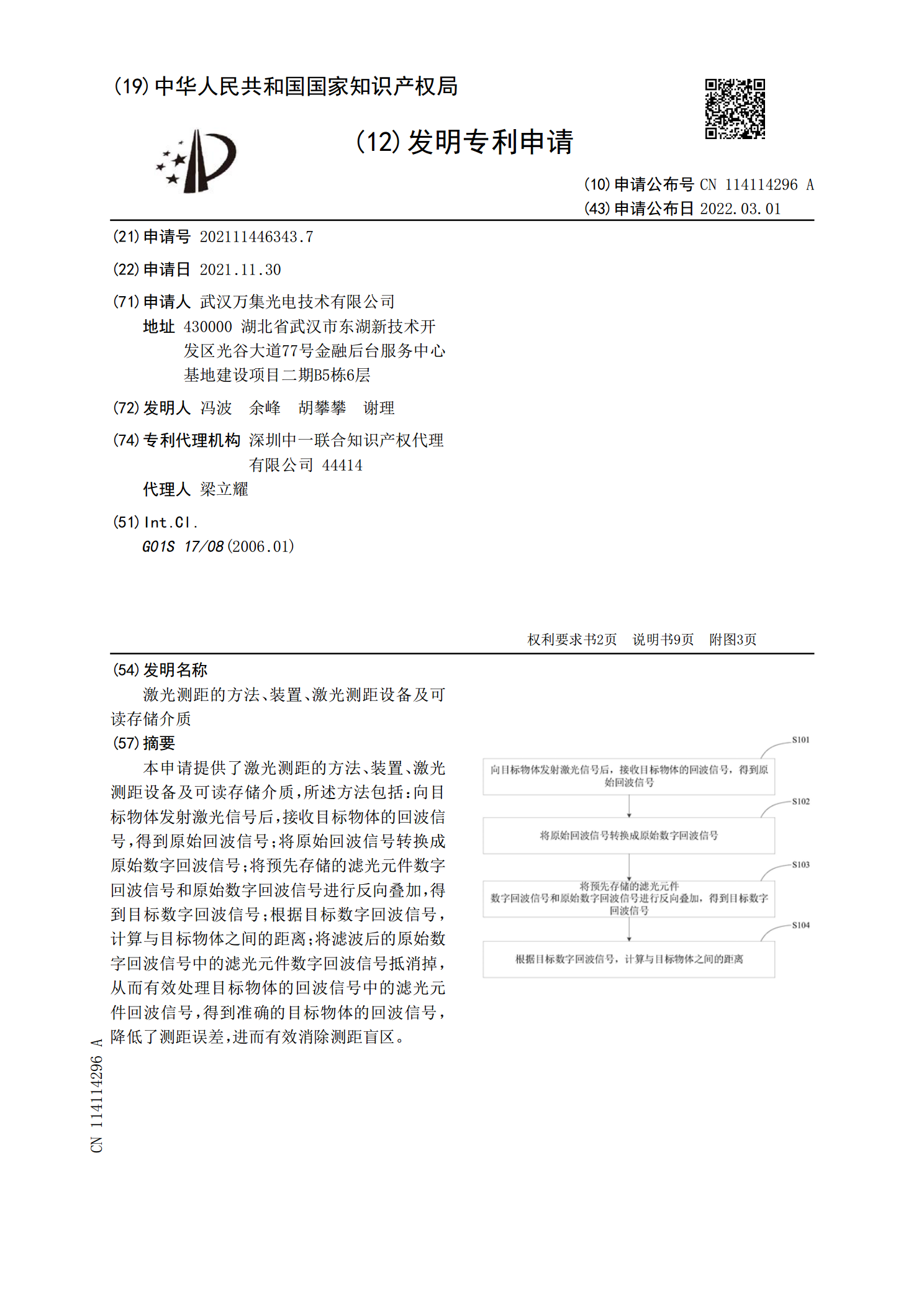
本申请提供了激光测距的方法、装置、激光测距设备及可读存储介质,所述方法包括:向目标物体发射激光信号后,接收目标物体的回波信号,得到原始回波信号;将原始回波信号转换成原始数字回波信号;将预先存储的滤光元件数字回波信号和原始数字回波信号进行反向叠加,得到目标数字回波信号;根据目标数字回波信号,计算与目标物体之间的距离;将滤波后的原始数字回波信号中的滤光元件数字回波信号抵消掉,从而有效处理目标物体的回波信号中的滤光元件回波信号,得到准确的目标物体的回波信号,降低了测距误差,进而有效消除测距盲区。
基于网状物的水下测距方法、测距系统及存储介质.pdf
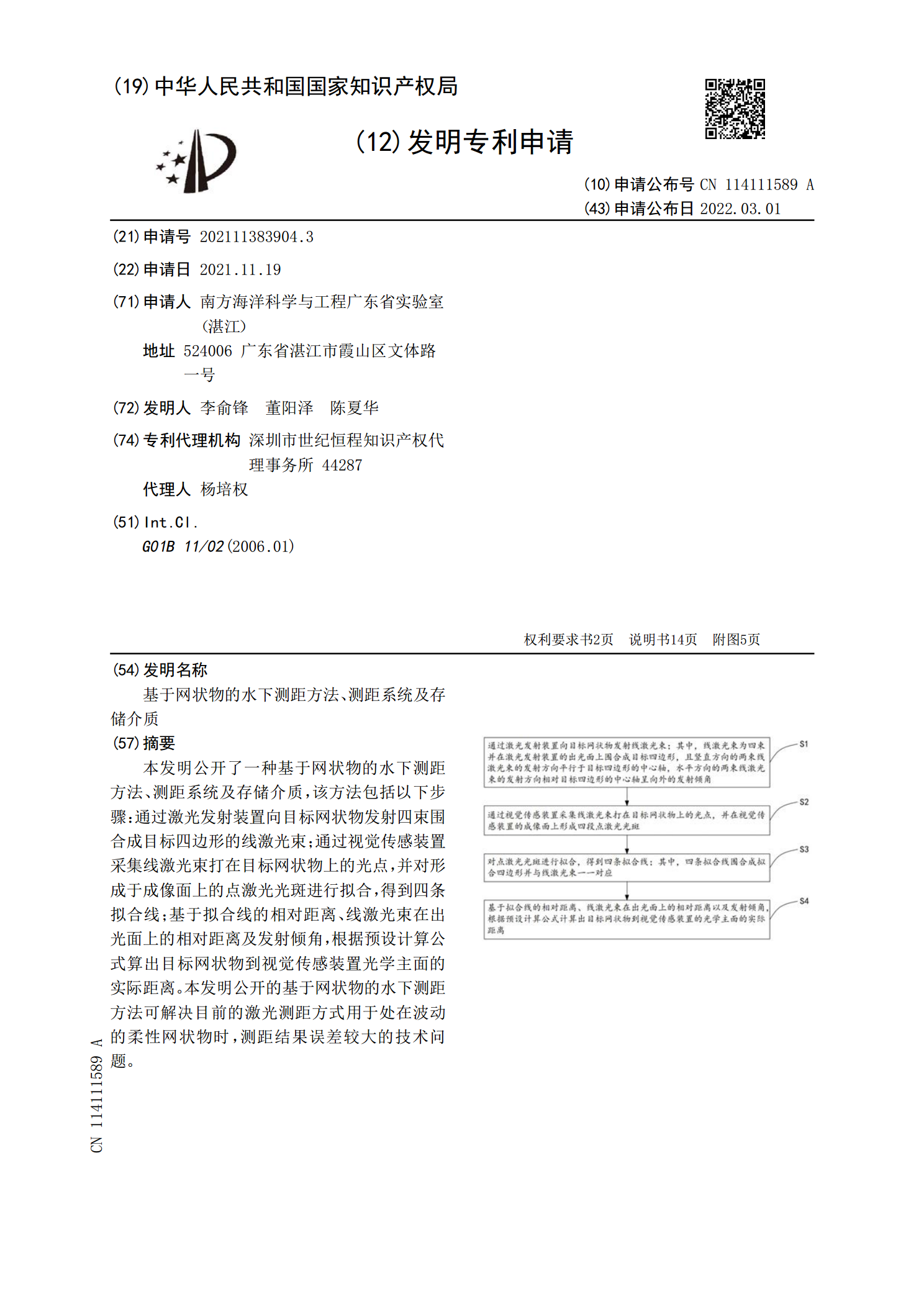
本发明公开了一种基于网状物的水下测距方法、测距系统及存储介质,该方法包括以下步骤:通过激光发射装置向目标网状物发射四束围合成目标四边形的线激光束;通过视觉传感装置采集线激光束打在目标网状物上的光点,并对形成于成像面上的点激光光斑进行拟合,得到四条拟合线;基于拟合线的相对距离、线激光束在出光面上的相对距离及发射倾角,根据预设计算公式算出目标网状物到视觉传感装置光学主面的实际距离。本发明公开的基于网状物的水下测距方法可解决目前的激光测距方式用于处在波动的柔性网状物时,测距结果误差较大的技术问题。
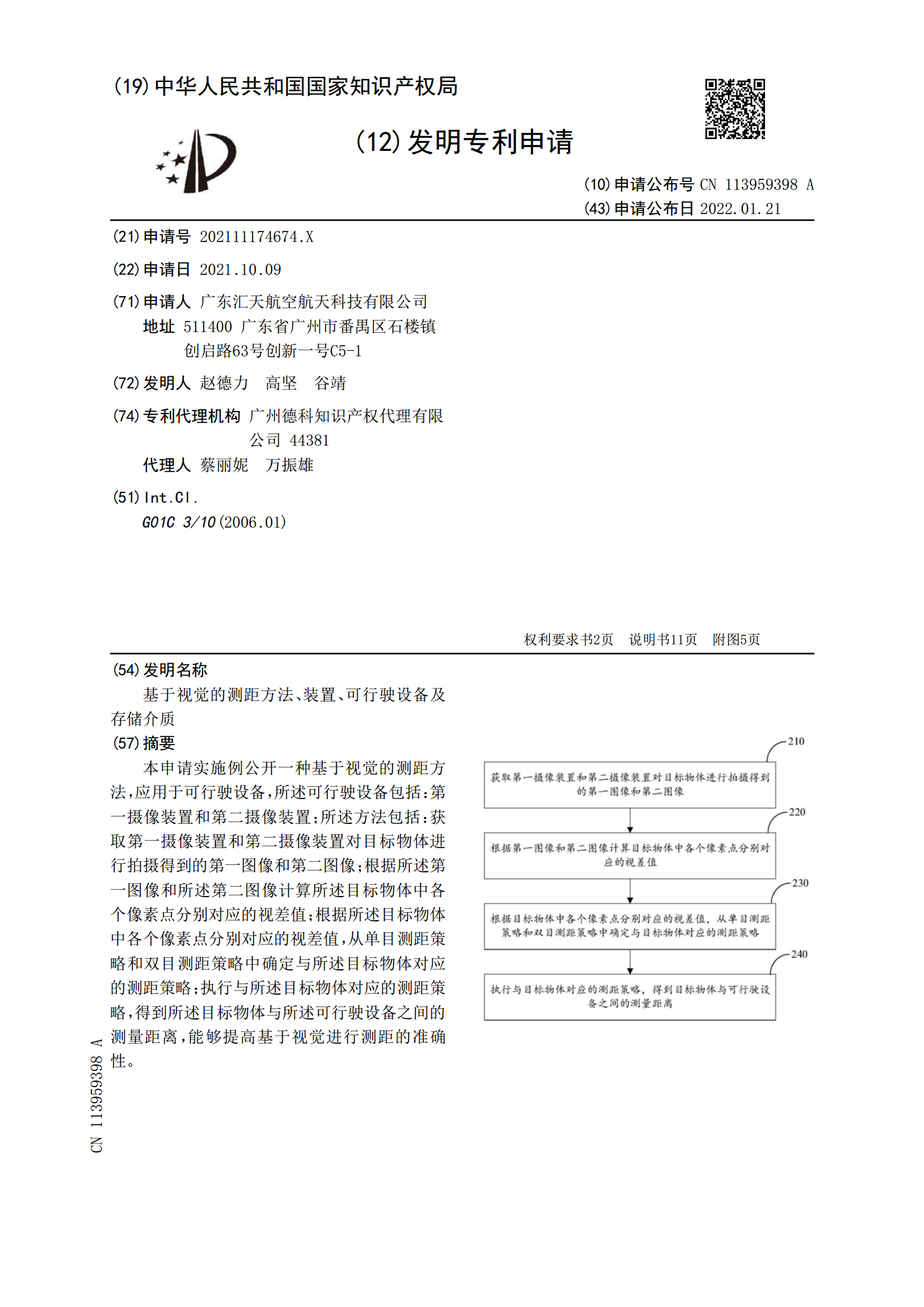
基于视觉的测距方法、装置、可行驶设备及存储介质.pdf
本申请实施例公开一种基于视觉的测距方法,应用于可行驶设备,所述可行驶设备包括:第一摄像装置和第二摄像装置;所述方法包括:获取第一摄像装置和第二摄像装置对目标物体进行拍摄得到的第一图像和第二图像;根据所述第一图像和所述第二图像计算所述目标物体中各个像素点分别对应的视差值;根据所述目标物体中各个像素点分别对应的视差值,从单目测距策略和双目测距策略中确定与所述目标物体对应的测距策略;执行与所述目标物体对应的测距策略,得到所述目标物体与所述可行驶设备之间的测量距离,能够提高基于视觉进行测距的准确性。
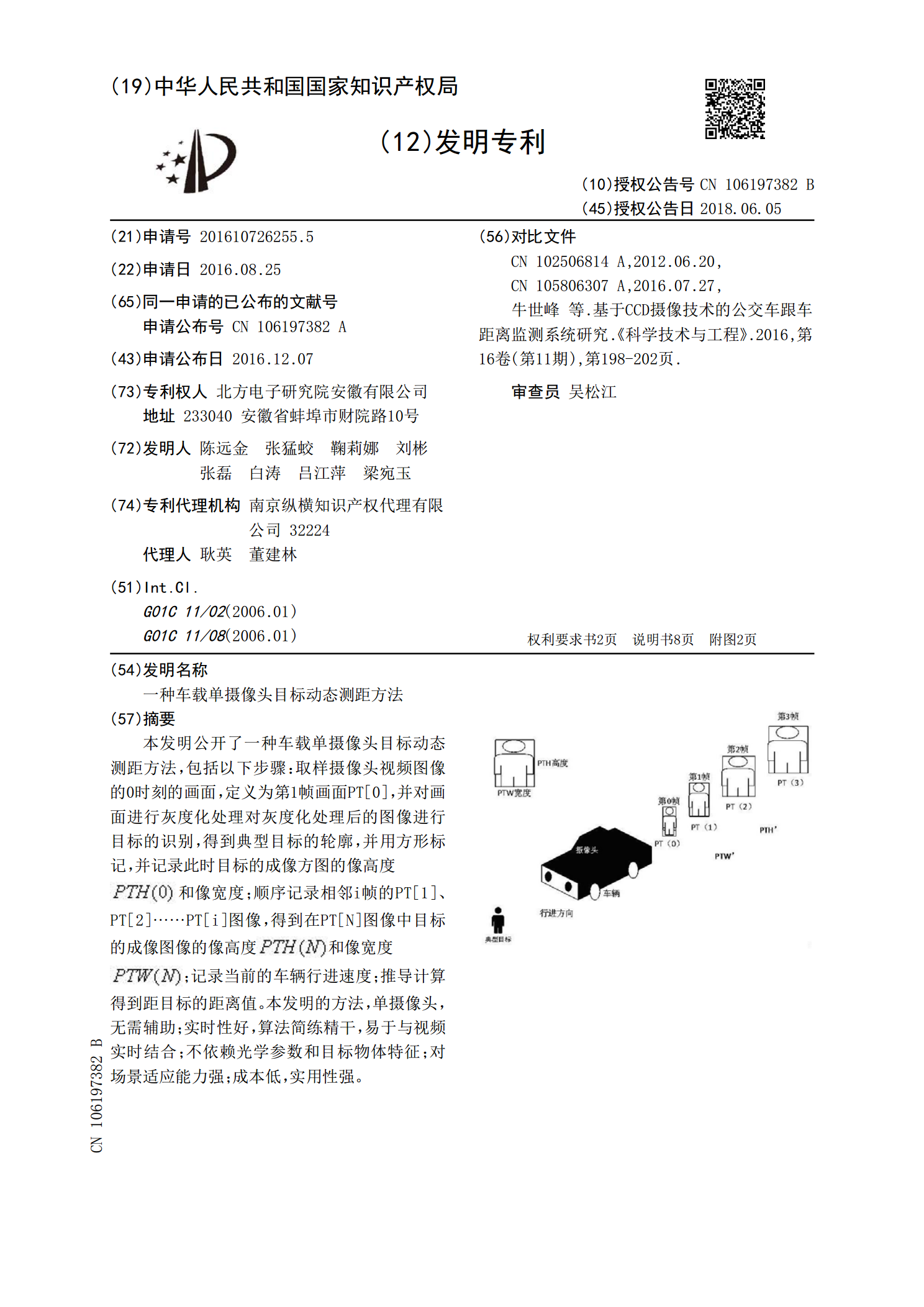
一种车载单摄像头目标动态测距方法.pdf
本发明公开了一种车载单摄像头目标动态测距方法,包括以下步骤:取样摄像头视频图像的0时刻的画面,定义为第1帧画面PT[0],并对画面进行灰度化处理对灰度化处理后的图像进行目标的识别,得到典型目标的轮廓,并用方形标记,并记录此时目标的成像方图的像高度