
物体跟踪装置以及物体跟踪方法.pdf

一只****签网

1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共28页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
物体跟踪装置以及物体跟踪方法.pdf
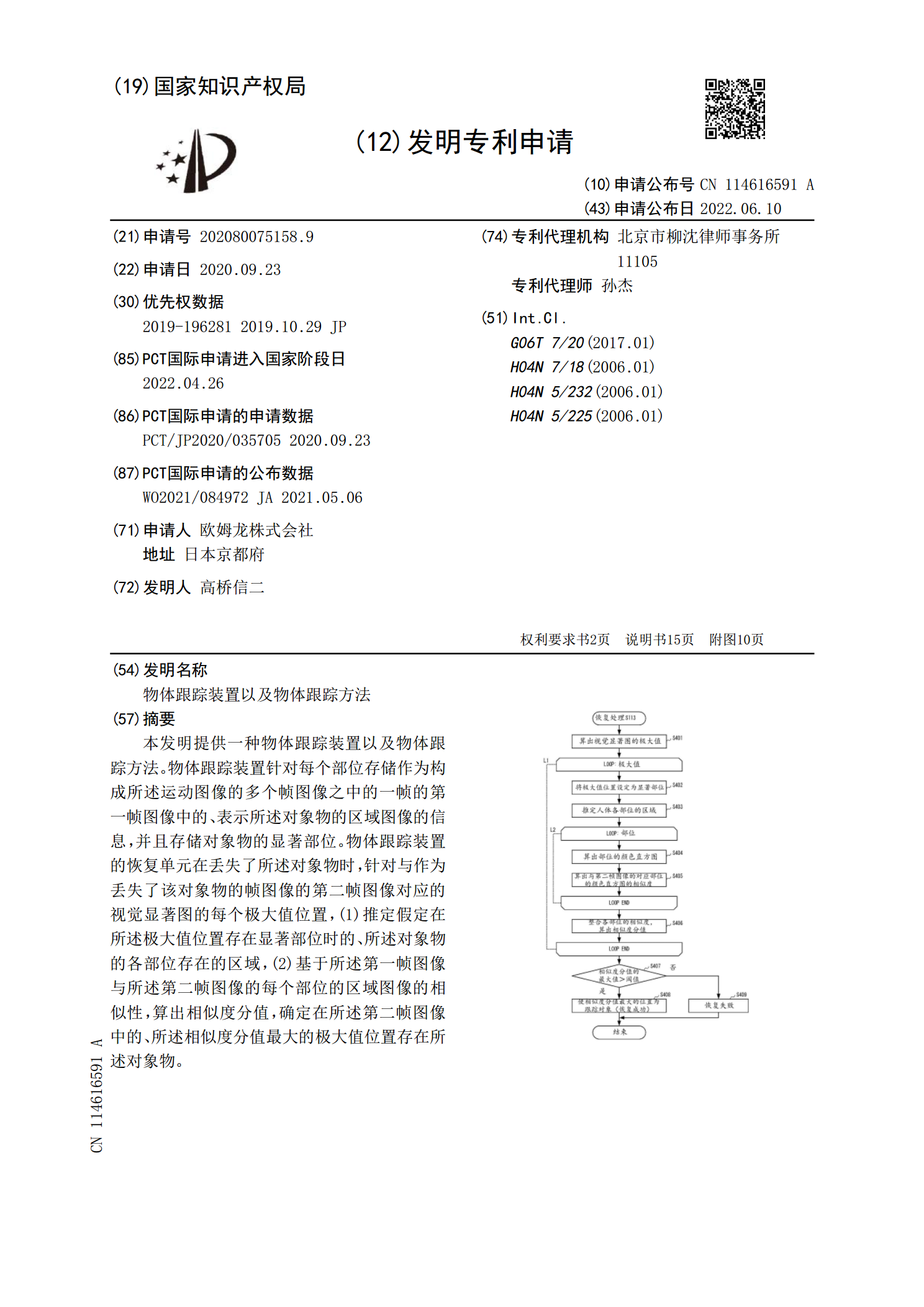
本发明提供一种物体跟踪装置以及物体跟踪方法。物体跟踪装置针对每个部位存储作为构成所述运动图像的多个帧图像之中的一帧的第一帧图像中的、表示所述对象物的区域图像的信息,并且存储对象物的显著部位。物体跟踪装置的恢复单元在丢失了所述对象物时,针对与作为丢失了该对象物的帧图像的第二帧图像对应的视觉显著图的每个极大值位置,(1)推定假定在所述极大值位置存在显著部位时的、所述对象物的各部位存在的区域,(2)基于所述第一帧图像与所述第二帧图像的每个部位的区域图像的相似性,算出相似度分值,确定在所述第二帧图像中的、所述相似
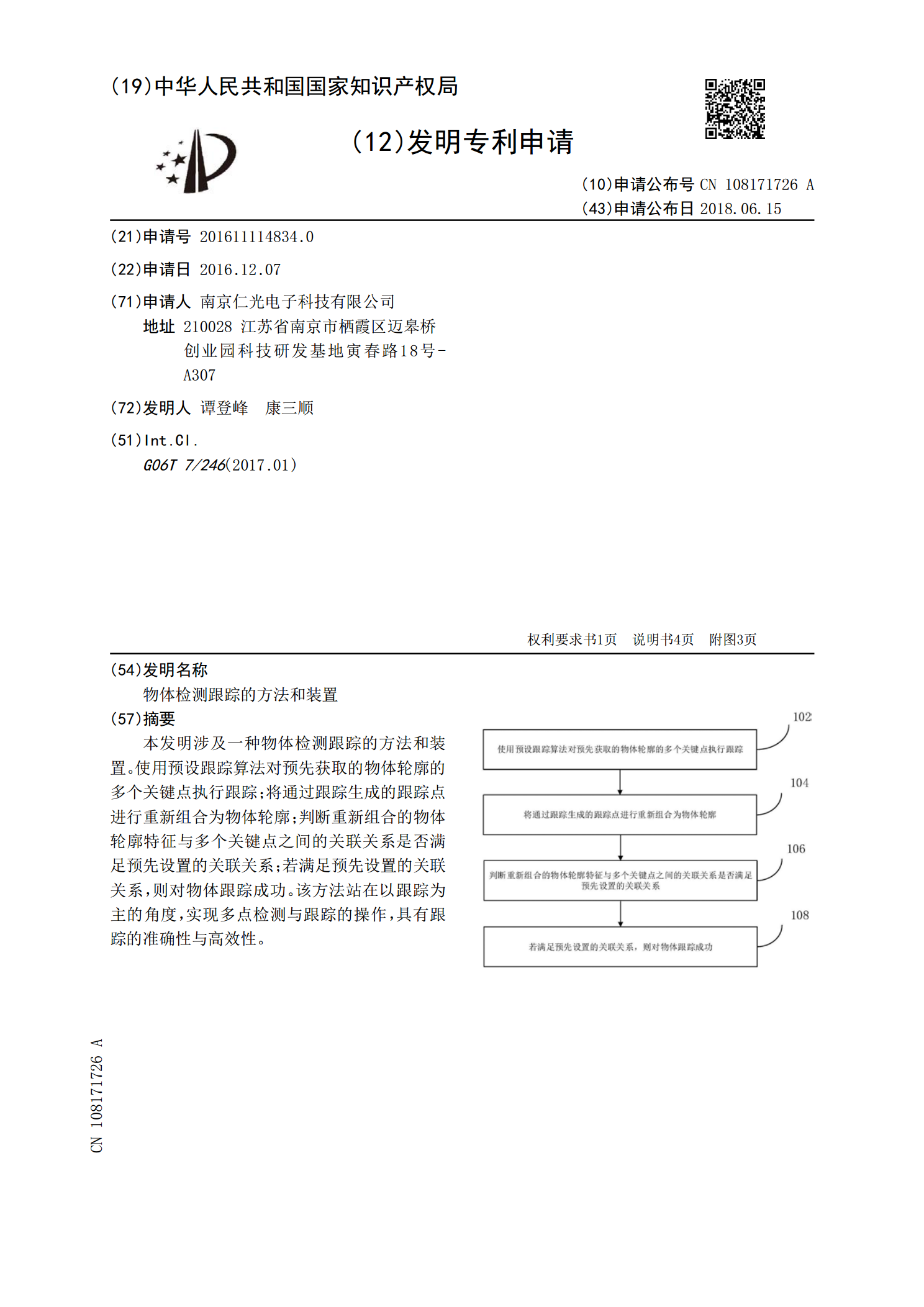
物体检测跟踪的方法和装置.pdf
本发明涉及一种物体检测跟踪的方法和装置。使用预设跟踪算法对预先获取的物体轮廓的多个关键点执行跟踪;将通过跟踪生成的跟踪点进行重新组合为物体轮廓;判断重新组合的物体轮廓特征与多个关键点之间的关联关系是否满足预先设置的关联关系;若满足预先设置的关联关系,则对物体跟踪成功。该方法站在以跟踪为主的角度,实现多点检测与跟踪的操作,具有跟踪的准确性与高效性。
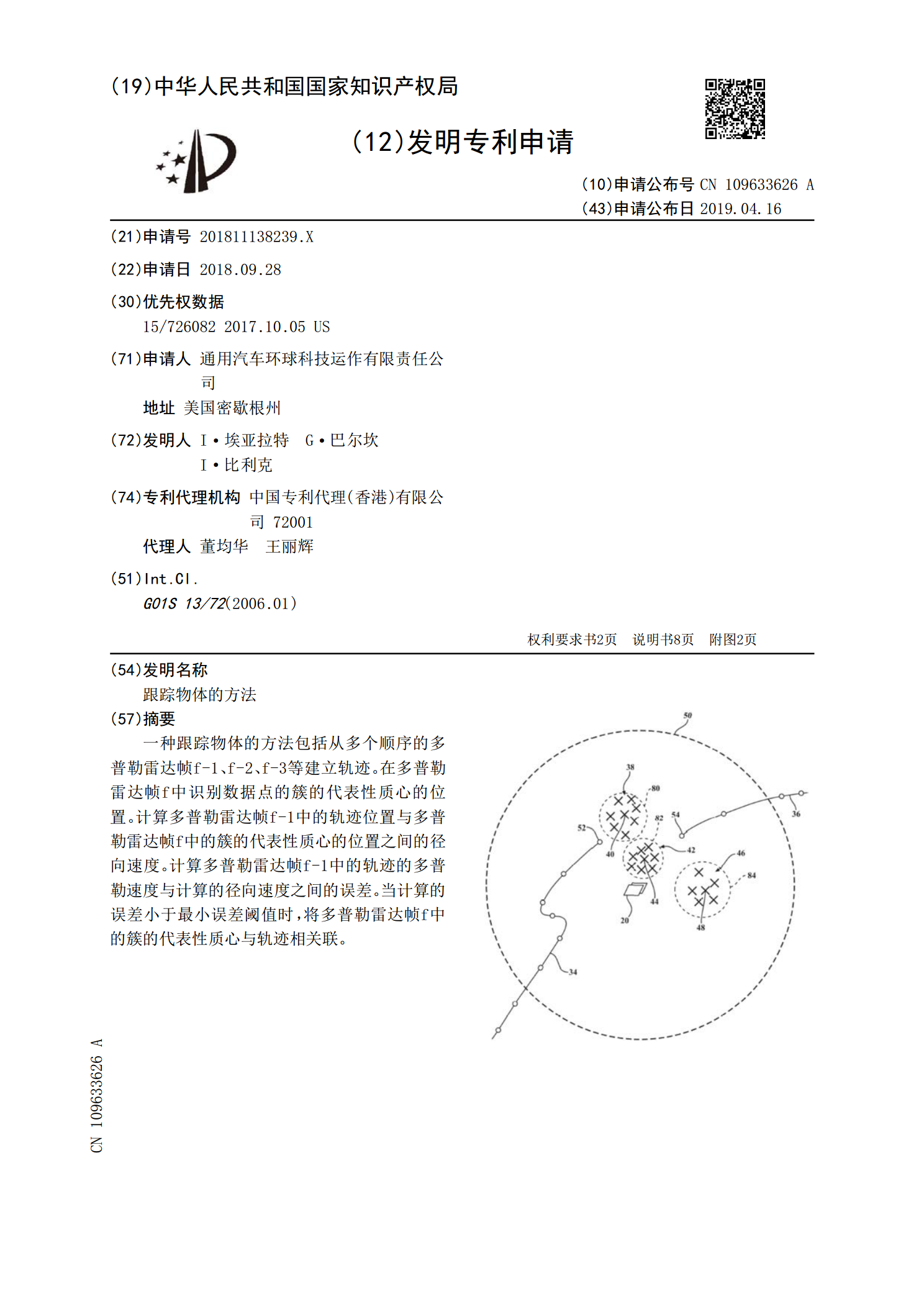
跟踪物体的方法.pdf
一种跟踪物体的方法包括从多个顺序的多普勒雷达帧f‑1、f‑2、f‑3等建立轨迹。在多普勒雷达帧f中识别数据点的簇的代表性质心的位置。计算多普勒雷达帧f‑1中的轨迹位置与多普勒雷达帧f中的簇的代表性质心的位置之间的径向速度。计算多普勒雷达帧f‑1中的轨迹的多普勒速度与计算的径向速度之间的误差。当计算的误差小于最小误差阈值时,将多普勒雷达帧f中的簇的代表性质心与轨迹相关联。
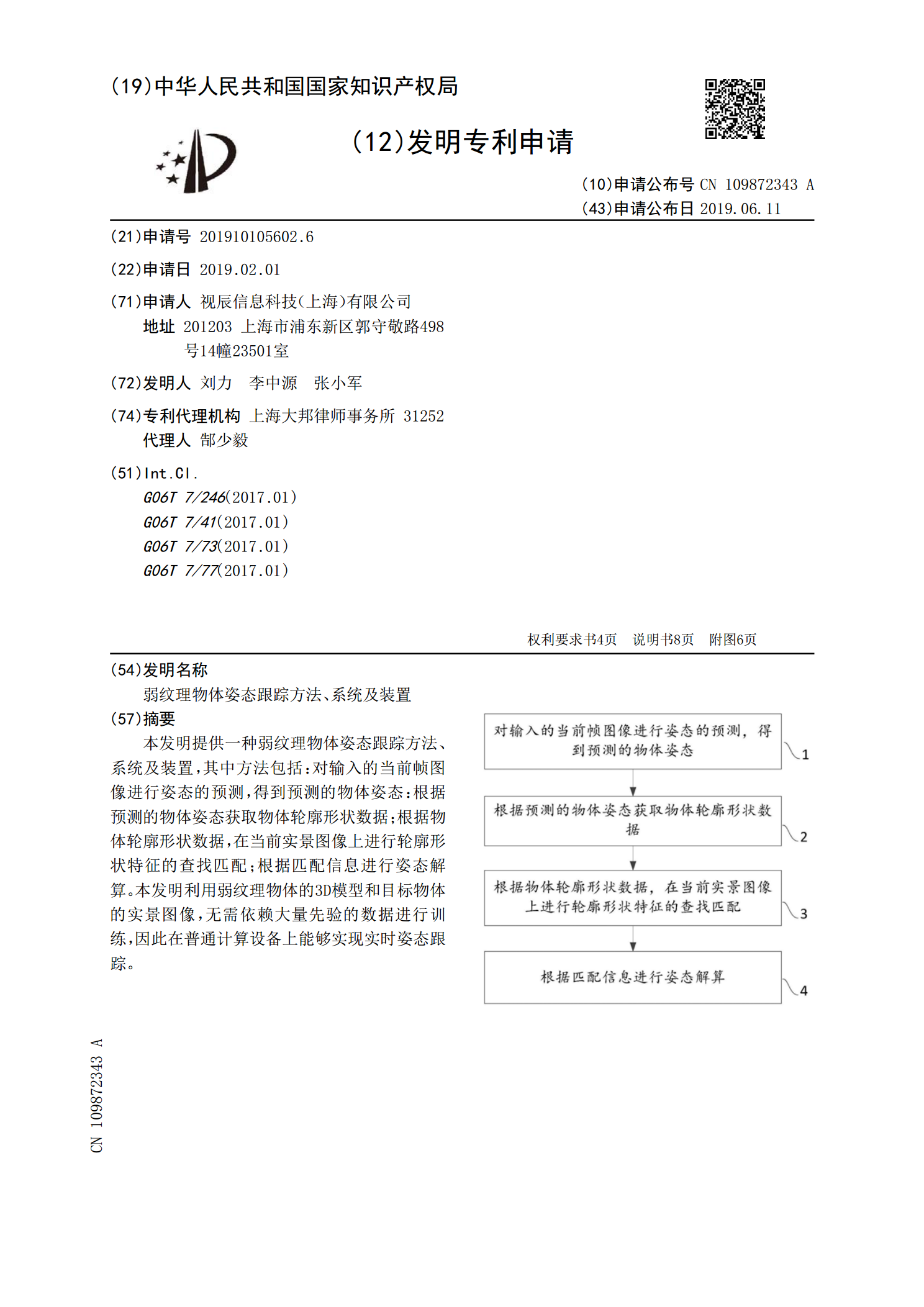
弱纹理物体姿态跟踪方法、系统及装置.pdf
本发明提供一种弱纹理物体姿态跟踪方法、系统及装置,其中方法包括:对输入的当前帧图像进行姿态的预测,得到预测的物体姿态:根据预测的物体姿态获取物体轮廓形状数据;根据物体轮廓形状数据,在当前实景图像上进行轮廓形状特征的查找匹配;根据匹配信息进行姿态解算。本发明利用弱纹理物体的3D模型和目标物体的实景图像,无需依赖大量先验的数据进行训练,因此在普通计算设备上能够实现实时姿态跟踪。
物体跟踪系统.pdf
公开了一种物体跟踪系统。跟踪系统被设计用于全球定位系统(GPS)、射频(RF)和/或蜂窝通信信号不可用的环境。该系统经配置以使用周围环境的相机捕获的图像以及惯性测量来执行视觉和/或传统测距。物体检测算法和/或跟踪方案可用于检测捕获的图像内的物体,以帮助确定相对于物体的用户位置。检测器架构可以经配置以允许与目标(和/或物体)无关的相机检测和/或跟踪,其根据要检测和/或跟踪的物体的类型而容易地配置和/或可重新配置。