
物体跟踪系统.pdf

梦影****主a

1/10
2/10

3/10

4/10
5/10
6/10
7/10

8/10

9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
物体跟踪系统.pdf
公开了一种物体跟踪系统。跟踪系统被设计用于全球定位系统(GPS)、射频(RF)和/或蜂窝通信信号不可用的环境。该系统经配置以使用周围环境的相机捕获的图像以及惯性测量来执行视觉和/或传统测距。物体检测算法和/或跟踪方案可用于检测捕获的图像内的物体,以帮助确定相对于物体的用户位置。检测器架构可以经配置以允许与目标(和/或物体)无关的相机检测和/或跟踪,其根据要检测和/或跟踪的物体的类型而容易地配置和/或可重新配置。
弱纹理物体姿态跟踪方法、系统及装置.pdf
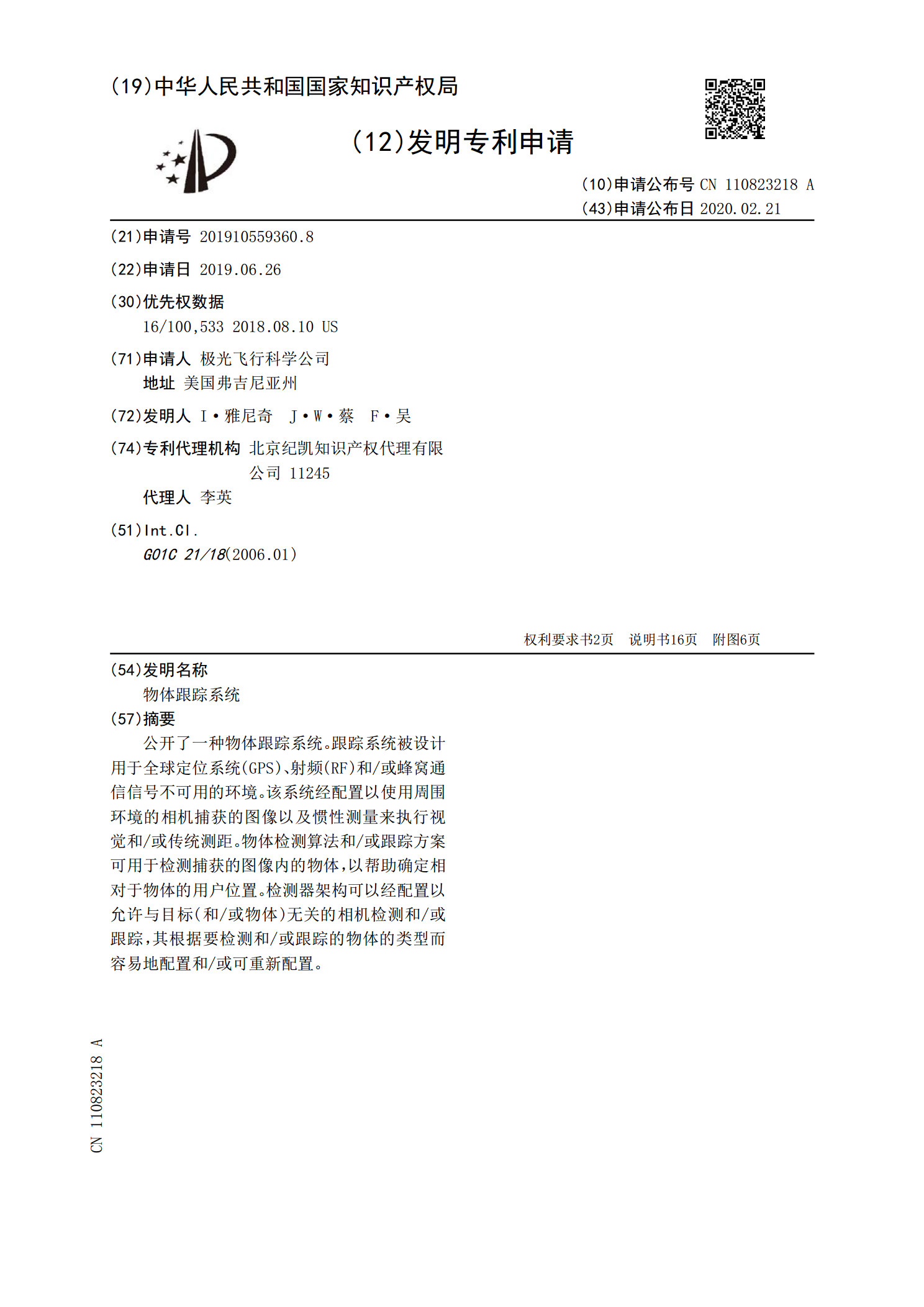
本发明提供一种弱纹理物体姿态跟踪方法、系统及装置,其中方法包括:对输入的当前帧图像进行姿态的预测,得到预测的物体姿态:根据预测的物体姿态获取物体轮廓形状数据;根据物体轮廓形状数据,在当前实景图像上进行轮廓形状特征的查找匹配;根据匹配信息进行姿态解算。本发明利用弱纹理物体的3D模型和目标物体的实景图像,无需依赖大量先验的数据进行训练,因此在普通计算设备上能够实现实时姿态跟踪。
物体跟踪装置以及物体跟踪方法.pdf
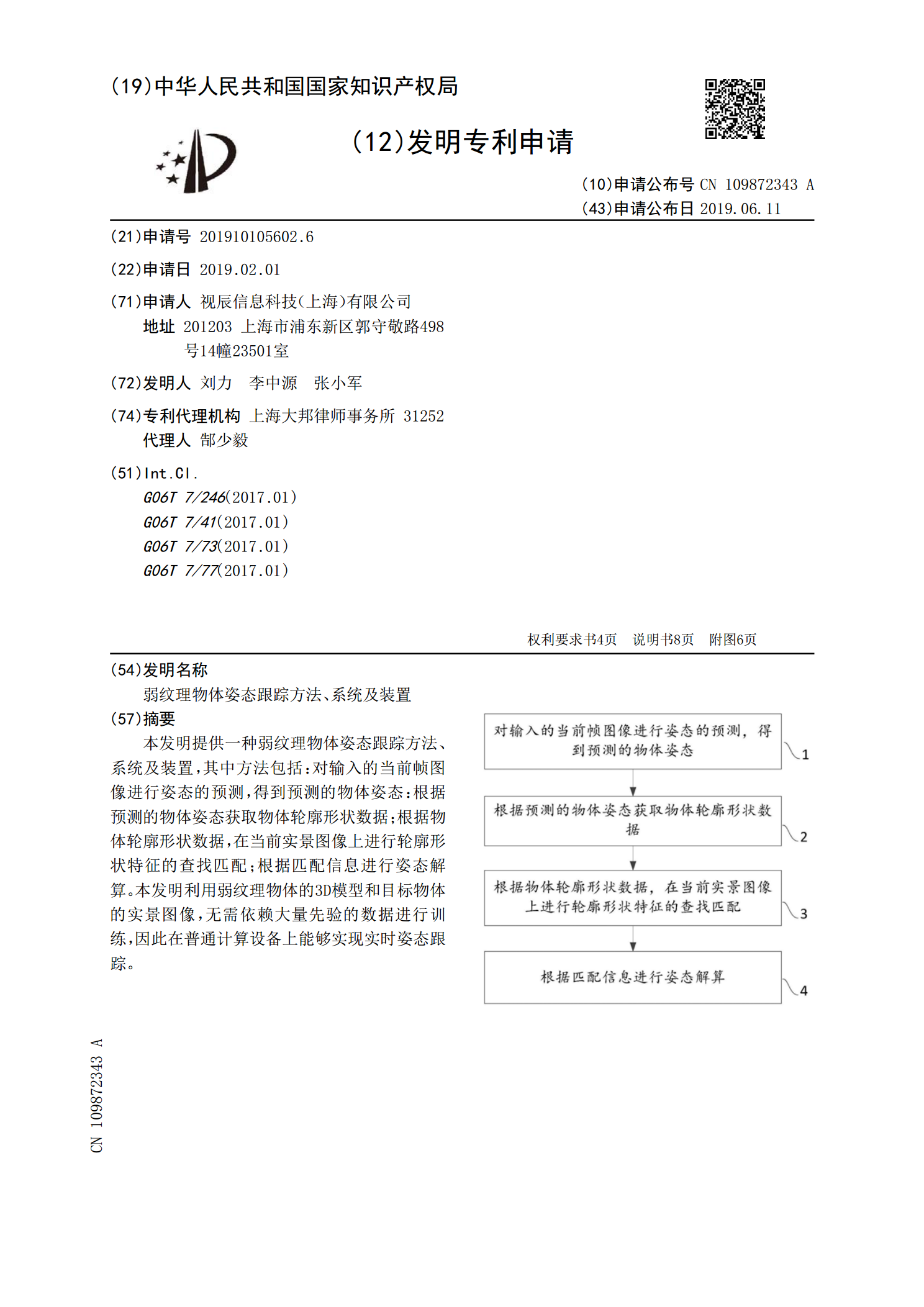
本发明提供一种物体跟踪装置以及物体跟踪方法。物体跟踪装置针对每个部位存储作为构成所述运动图像的多个帧图像之中的一帧的第一帧图像中的、表示所述对象物的区域图像的信息,并且存储对象物的显著部位。物体跟踪装置的恢复单元在丢失了所述对象物时,针对与作为丢失了该对象物的帧图像的第二帧图像对应的视觉显著图的每个极大值位置,(1)推定假定在所述极大值位置存在显著部位时的、所述对象物的各部位存在的区域,(2)基于所述第一帧图像与所述第二帧图像的每个部位的区域图像的相似性,算出相似度分值,确定在所述第二帧图像中的、所述相似

面向移动设备的三维物体跟踪与检测系统.docx
面向移动设备的三维物体跟踪与检测系统面向移动设备的三维物体跟踪与检测系统摘要:随着移动设备的普及和计算能力的提升,三维物体跟踪与检测已成为研究的热点。本论文提出了一种面向移动设备的三维物体跟踪与检测系统,通过结合机器学习算法和传感器技术,实现在移动设备上实时、高效的三维物体跟踪和检测。该系统能够广泛应用于移动设备上的增强现实、智能导航等领域。1.引言随着深度学习技术的快速发展,利用机器学习算法进行物体跟踪与检测已经取得了很大的进展。然而,传统的物体跟踪和检测系统往往需要大量的计算资源和存储空间,不适合在移

基于AR系统实现三维物体目标跟踪.docx
基于AR系统实现三维物体目标跟踪基于AR系统实现三维物体目标跟踪摘要随着增强现实(AR)技术的不断发展,其在各个领域中的应用越来越广泛。其中一项重要的应用是在AR系统中实现三维物体目标跟踪。三维物体目标跟踪是指通过AR技术将三维虚拟物体与现实环境进行交互,并对虚拟物体进行跟踪和定位。本论文将探讨基于AR系统实现三维物体目标跟踪的相关技术,并介绍其在教育、游戏和工业等领域中的应用。关键词:增强现实、三维物体、目标跟踪、虚拟物体、定位引言增强现实技术是一种通过将虚拟世界与现实世界进行融合的方法,将计算机生成的