
一种基于SLAM建图的多传感器数据融合的算法.pdf

飞舟****文章

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于SLAM建图的多传感器数据融合的算法.pdf
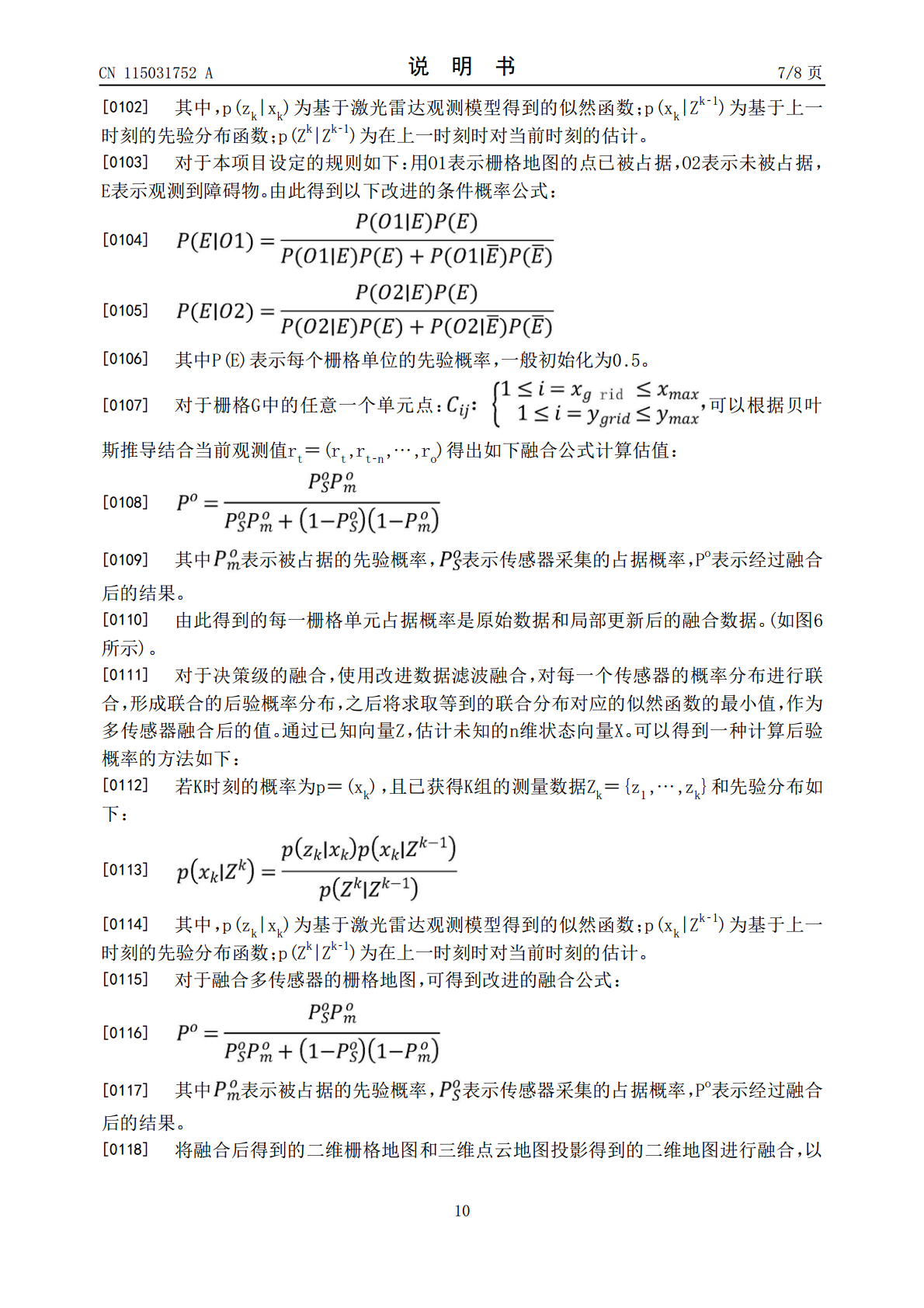
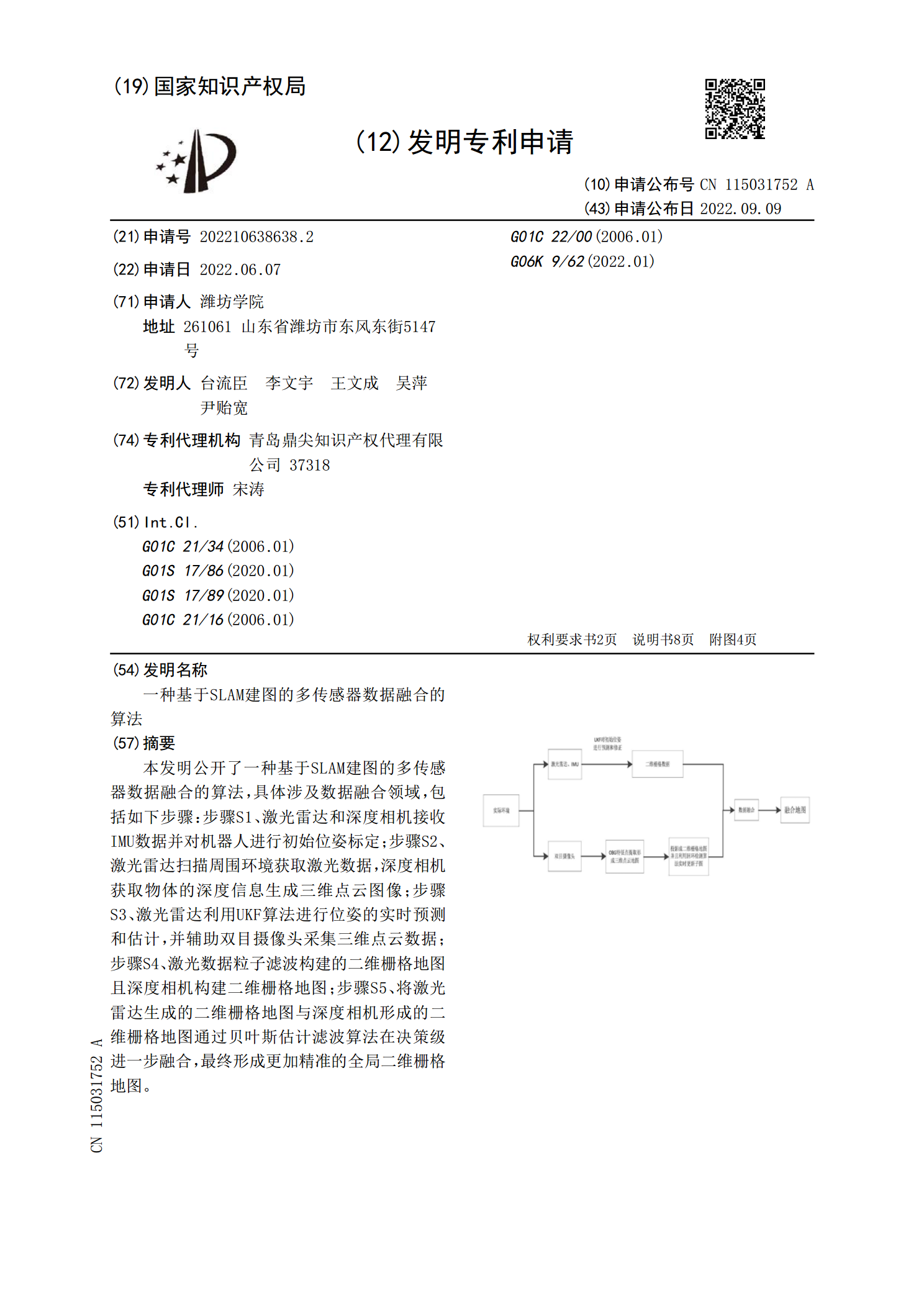
本发明公开了一种基于SLAM建图的多传感器数据融合的算法,具体涉及数据融合领域,包括如下步骤:步骤S1、激光雷达和深度相机接收IMU数据并对机器人进行初始位姿标定;步骤S2、激光雷达扫描周围环境获取激光数据,深度相机获取物体的深度信息生成三维点云图像;步骤S3、激光雷达利用UKF算法进行位姿的实时预测和估计,并辅助双目摄像头采集三维点云数据;步骤S4、激光数据粒子滤波构建的二维栅格地图且深度相机构建二维栅格地图;步骤S5、将激光雷达生成的二维栅格地图与深度相机形成的二维栅格地图通过贝叶斯估计滤波算法在决策

基于Eclipse的多传感器数据融合算法仿真系统.docx
基于Eclipse的多传感器数据融合算法仿真系统摘要数据融合是指对来自多个信息源的数据和信息进行综合处理,以获得对事物或目标更客观、更本质认识的综合信息。算法仿真是数据融合系统设计中的一项重要工作。本文介绍了一种基于Eclipse开发的数据融合算法仿真系统,并对系统设计和实现中的一些关键技术进行了讨论,比如Java和Matlab的跨语言调用、Eclipse插件技术等。关键词数据融合;仿真系统;Eclipse;多传感器1引言多传感器数据融合就是把多个相同类型或不同类型的传感器所提供的局部观察量加以综合,消除
基于Eclipse的多传感器数据融合算法仿真系统.docx
基于Eclipse的多传感器数据融合算法仿真系统摘要数据融合是指对来自多个信息源的数据和信息进行综合处理,以获得对事物或目标更客观、更本质认识的综合信息。算法仿真是数据融合系统设计中的一项重要工作。本文介绍了一种基于Eclipse开发的数据融合算法仿真系统,并对系统设计和实现中的一些关键技术进行了讨论,比如Java和Matlab的跨语言调用、Eclipse插件技术等。关键词数据融合;仿真系统;Eclipse;多传感器1引言多传感器数据融合就是把多个相同类型或不同类型的传感器所提供的局部观察量加以综合,消除
基于Eclipse的多传感器数据融合算法仿真系统.docx
基于Eclipse的多传感器数据融合算法仿真系统摘要数据融合是指对来自多个信息源的数据和信息进行综合处理,以获得对事物或目标更客观、更本质认识的综合信息。算法仿真是数据融合系统设计中的一项重要工作。本文介绍了一种基于Eclipse开发的数据融合算法仿真系统,并对系统设计和实现中的一些关键技术进行了讨论,比如Java和Matlab的跨语言调用、Eclipse插件技术等。关键词数据融合;仿真系统;Eclipse;多传感器1引言多传感器数据融合就是把多个相同类型或不同类型的传感器所提供的局部观察量加以综合,消除
一种SLAM与UWB的实时融合与建图方法.pdf
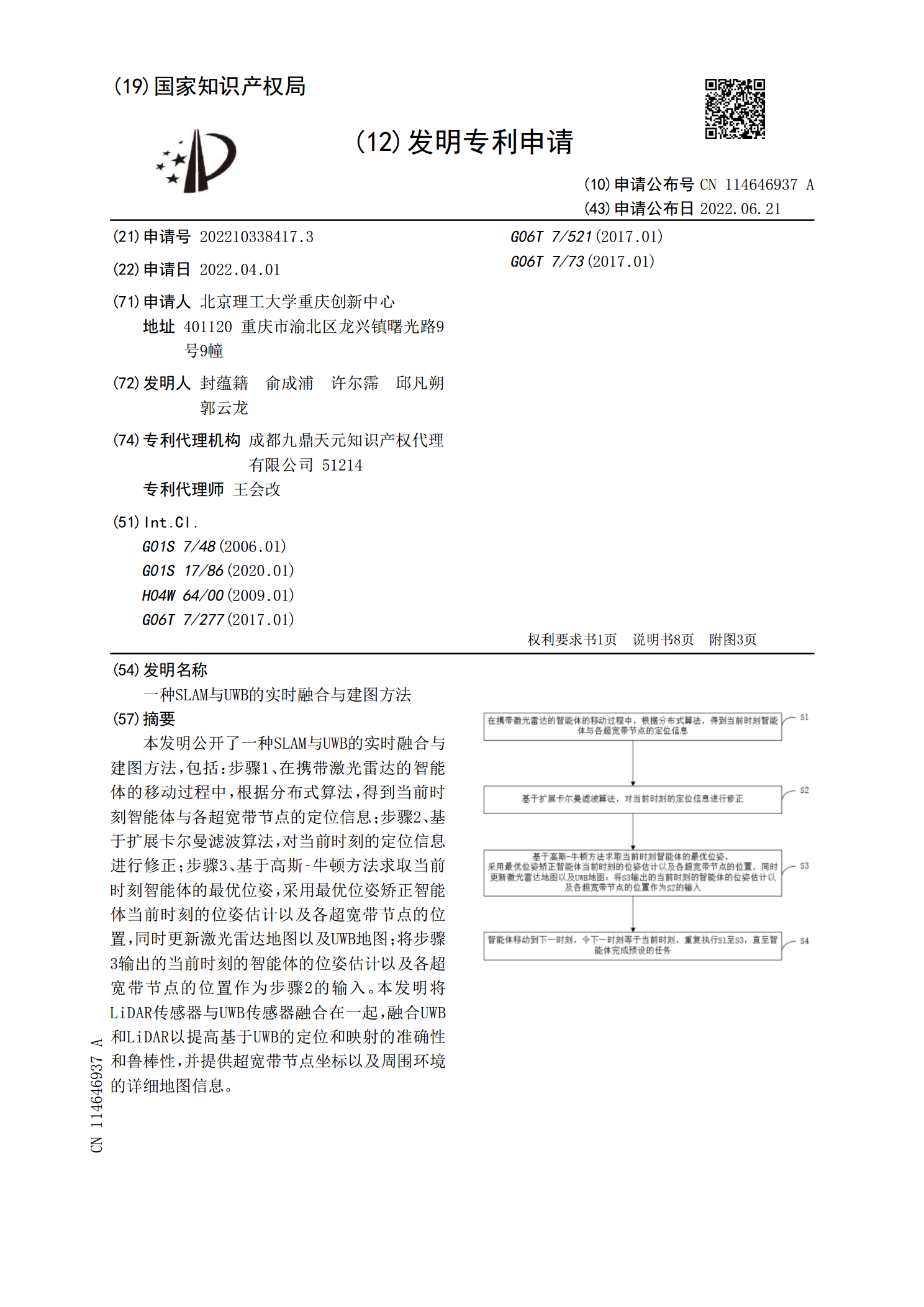
本发明公开了一种SLAM与UWB的实时融合与建图方法,包括:步骤1、在携带激光雷达的智能体的移动过程中,根据分布式算法,得到当前时刻智能体与各超宽带节点的定位信息;步骤2、基于扩展卡尔曼滤波算法,对当前时刻的定位信息进行修正;步骤3、基于高斯?牛顿方法求取当前时刻智能体的最优位姿,采用最优位姿矫正智能体当前时刻的位姿估计以及各超宽带节点的位置,同时更新激光雷达地图以及UWB地图;将步骤3输出的当前时刻的智能体的位姿估计以及各超宽带节点的位置作为步骤2的输入。本发明将LiDAR传感器与UWB传感器融合在一起