
基于水下航行器方位信息压缩的多平台被动数据融合方法.pdf

书生****写意


1/10
2/10

3/10
4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于水下航行器方位信息压缩的多平台被动数据融合方法.pdf
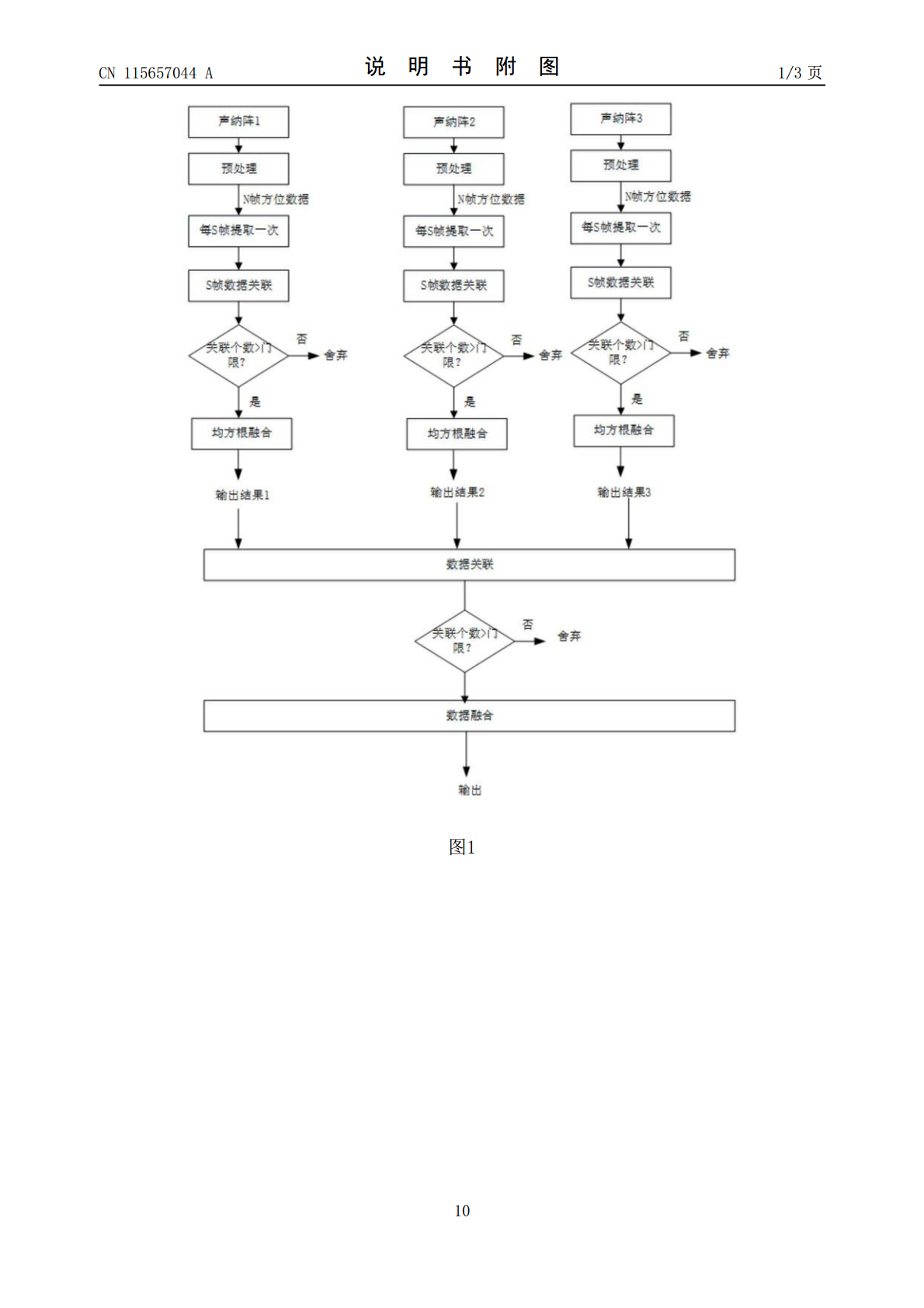
本发明提出一种基于水下航行器方位信息压缩的多平台被动数据融合方法,包括:步骤1,获取每个探测平台在目标跟踪过程中的帧数据,对所述数据帧进行压缩处理得到每个探测平台的量测值;步骤2,将当前时刻每个探测平台的任何两个所述量测值之间进行数据关联,根据关联结果对量测值两两进行定位;通过方位角信息,计算所述水下航行器的定位信息;步骤3,根据所述方位角信息,构建多传感器多目标跟踪场景,将多个所述水下航行器的定位信息发送到融合中心进行数据融合处理得到定位结果。

水下航行器导航及数据融合技术研究.docx
水下航行器导航及数据融合技术研究摘要本文针对水下航行器导航及数据融合技术进行了研究和分析。首先分析了水下航行器的特点和导航需求,包括水压、水温、水流等因素对导航的影响。然后介绍了水下航行器导航技术的发展,包括基于GPS的导航、惯性导航、声纳导航等方面。随后分析了水下航行器数据融合技术的原理和实现方法。最后,针对目前存在的问题和不足,提出了未来技术发展的方向和建议。关键词:水下航行器、导航技术、数据融合、GPS、惯性导航、声纳导航。引言随着社会经济的不断发展和科学技术的不断进步,人们越来越关注深海资源的开发

基于复杂网络构建的自主式水下航行器航行数据分析方法.pdf
本申请实施例提供一种基于复杂网络构建的自主式水下航行器航行数据分析方法,以自主式水下航行器现场所采集和保存的航姿数据为基础,采用密度峰值聚类算法消除冗余波动,同时保留大部分关键数据转折点,实现航行数据优化和去噪的目标;通过构建加权复杂网络,使用拓扑统计来分析数据的波动模式并描述航行状态,以调整自主式水下航行器朝着有意义的作业航向前进,即在整个航行过程中航姿数据始终与航行模式间存在关联关系,以此提升自主式水下航行器高度自主性和海洋长航程调查任务实施的质量与效率。

一种基于水下无人航行器的多目标被动跟踪算法.docx
一种基于水下无人航行器的多目标被动跟踪算法水下无人航行器(AUV)在水下资源勘探、水下生物研究等领域中扮演着重要角色。然而,AUV需要准确地掌握水下环境,并在复杂的水下环境中有效跟踪多种目标,如鱼群、海底地形等,以提高作业效率和科研成果。本文将介绍一种基于水下无人航行器的多目标被动跟踪算法。传统的跟踪算法通常采用主动探测和目标跟踪,缺点是易受到环境干扰,如水下流动、浊度、水平面波动等因素影响。因此,基于被动探测的目标跟踪算法逐渐得到发展并被广泛应用。本文介绍的算法是一种被动跟踪算法,它可以跟踪多个目标并在

基于水下航行器导航定位及信息融合技术研究的开题报告.docx
基于水下航行器导航定位及信息融合技术研究的开题报告一、选题背景水下探测与勘测在海底资源开发、海洋环境监测、航运安全等领域具有重要意义,而水下航行器作为一种重要的水下探测装备,越来越受到广泛关注。水下航行器主要包括自主式水下机器人、有线/无线遥控水下车等。水下航行器在海洋探测任务中,需要精准的导航和定位技术来保证任务执行的准确性和稳定性。水下环境存在多种复杂的干扰和噪声,这对水下航行器的导航和定位提出了很大的挑战。同时,水下航行器获取到的信息数据十分复杂,需要进行信息融合处理,提高数据的可靠性和准确性。因此