
一种基于水下无人航行器的多目标被动跟踪算法.docx

快乐****蜜蜂


1/2

2/2
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于水下无人航行器的多目标被动跟踪算法.docx
一种基于水下无人航行器的多目标被动跟踪算法水下无人航行器(AUV)在水下资源勘探、水下生物研究等领域中扮演着重要角色。然而,AUV需要准确地掌握水下环境,并在复杂的水下环境中有效跟踪多种目标,如鱼群、海底地形等,以提高作业效率和科研成果。本文将介绍一种基于水下无人航行器的多目标被动跟踪算法。传统的跟踪算法通常采用主动探测和目标跟踪,缺点是易受到环境干扰,如水下流动、浊度、水平面波动等因素影响。因此,基于被动探测的目标跟踪算法逐渐得到发展并被广泛应用。本文介绍的算法是一种被动跟踪算法,它可以跟踪多个目标并在

基于水下无人移动平台的多目标被动跟踪技术研究.docx
基于水下无人移动平台的多目标被动跟踪技术研究基于水下无人移动平台的多目标被动跟踪技术研究摘要:水下无人移动平台在海洋勘探、海洋保护和水下工程等领域具有重要应用价值。然而,在复杂的海洋环境中,如何实现水下目标的准确定位和跟踪成为一项具有挑战性的任务。因此,本文以水下无人移动平台为背景,研究了水下目标的多目标被动跟踪技术,包括声音、光线和电磁波等多种传感器的应用,并通过实验验证了该技术在水下目标跟踪上的有效性和实用性。关键词:水下无人移动平台;多目标跟踪;被动感知;声音;光线;电磁波引言:水下无人移动平台是一

基于单信标的无人水下航行器导航算法及改进.docx
基于单信标的无人水下航行器导航算法及改进基于单信标的无人水下航行器导航算法及改进摘要:随着科技的发展和需求的增加,无人水下航行器(UnmannedUnderwaterVehicle,UUV)在海洋资源勘探、水下环境监测、海洋科学研究等领域得到广泛应用。而水下环境的特殊性使得无人水下航行器的导航变得更加复杂。本文基于单信标提出了一种改进的无人水下航行器导航算法,通过实验证明了该算法在提高导航精度和鲁棒性方面的有效性。关键词:无人水下航行器、导航算法、单信标、精度、鲁棒性1.引言无人水下航行器能够在水下环境进
水下无人航行器主动对接装置及水下无人航行器.pdf
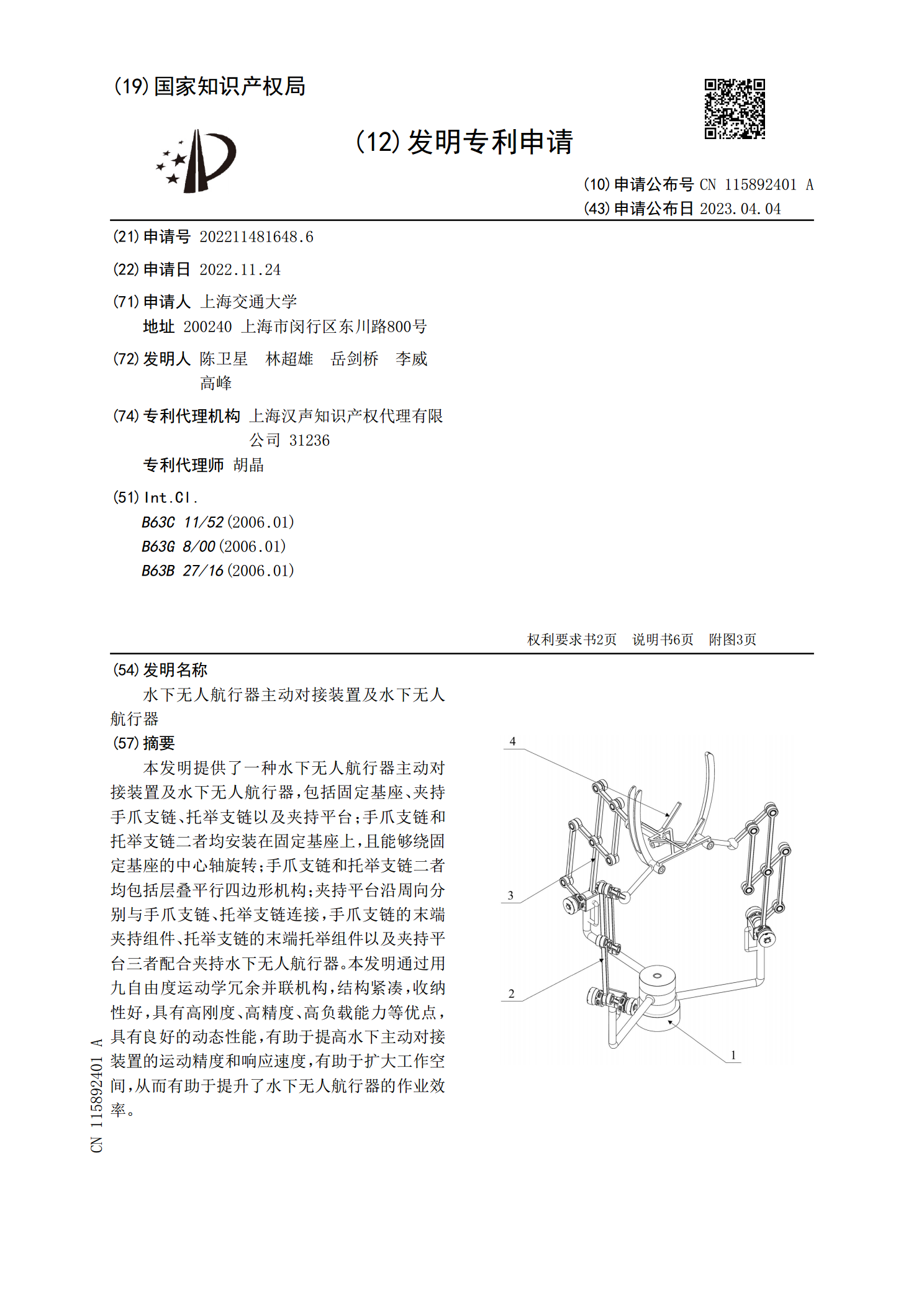
本发明提供了一种水下无人航行器主动对接装置及水下无人航行器,包括固定基座、夹持手爪支链、托举支链以及夹持平台;手爪支链和托举支链二者均安装在固定基座上,且能够绕固定基座的中心轴旋转;手爪支链和托举支链二者均包括层叠平行四边形机构;夹持平台沿周向分别与手爪支链、托举支链连接,手爪支链的末端夹持组件、托举支链的末端托举组件以及夹持平台三者配合夹持水下无人航行器。本发明通过用九自由度运动学冗余并联机构,结构紧凑,收纳性好,具有高刚度、高精度、高负载能力等优点,具有良好的动态性能,有助于提高水下主动对接装置的运动

基于混沌蚁群算法的水下无人航行器航路规划.docx
基于混沌蚁群算法的水下无人航行器航路规划随着水下航行器的逐渐普及,水下航行器在海洋探索、资源勘探等方面的应用也越来越广泛。然而,水下环境具有不可预测性和危险性,这为水下航行器的安全控制和路径规划带来了极大的挑战。因此,如何实现高效准确的水下航行器路径规划成为一个重要研究领域。本文主要介绍混沌蚁群算法在水下无人航行器航路规划方面的应用。一、混沌蚁群算法的原理混沌蚁群算法是将蚁群算法和混沌算法相结合的一种智能优化算法,它首先利用混沌序列产生的随机数作为蚁群算法中的随机数,从而提高了蚁群算法的全局搜索能力和收敛