
建筑遮阳自适应动态控制方法、系统及介质.pdf

书錦****by


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
建筑遮阳自适应动态控制方法、系统及介质.pdf
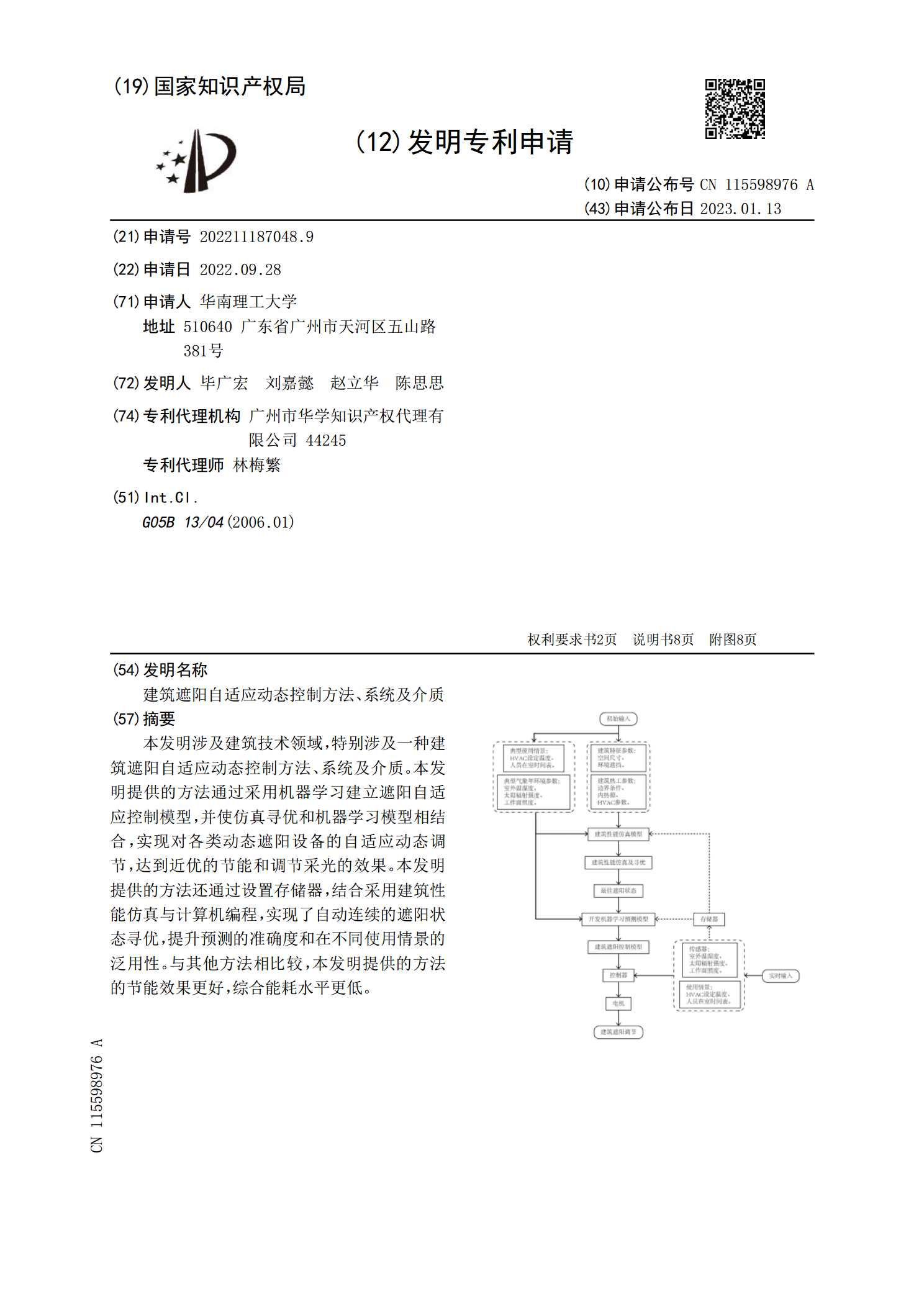
本发明涉及建筑技术领域,特别涉及一种建筑遮阳自适应动态控制方法、系统及介质。本发明提供的方法通过采用机器学习建立遮阳自适应控制模型,并使仿真寻优和机器学习模型相结合,实现对各类动态遮阳设备的自适应动态调节,达到近优的节能和调节采光的效果。本发明提供的方法还通过设置存储器,结合采用建筑性能仿真与计算机编程,实现了自动连续的遮阳状态寻优,提升预测的准确度和在不同使用情景的泛用性。与其他方法相比较,本发明提供的方法的节能效果更好,综合能耗水平更低。
基于声音的灯光动态控制方法、设备、系统及存储介质.pdf
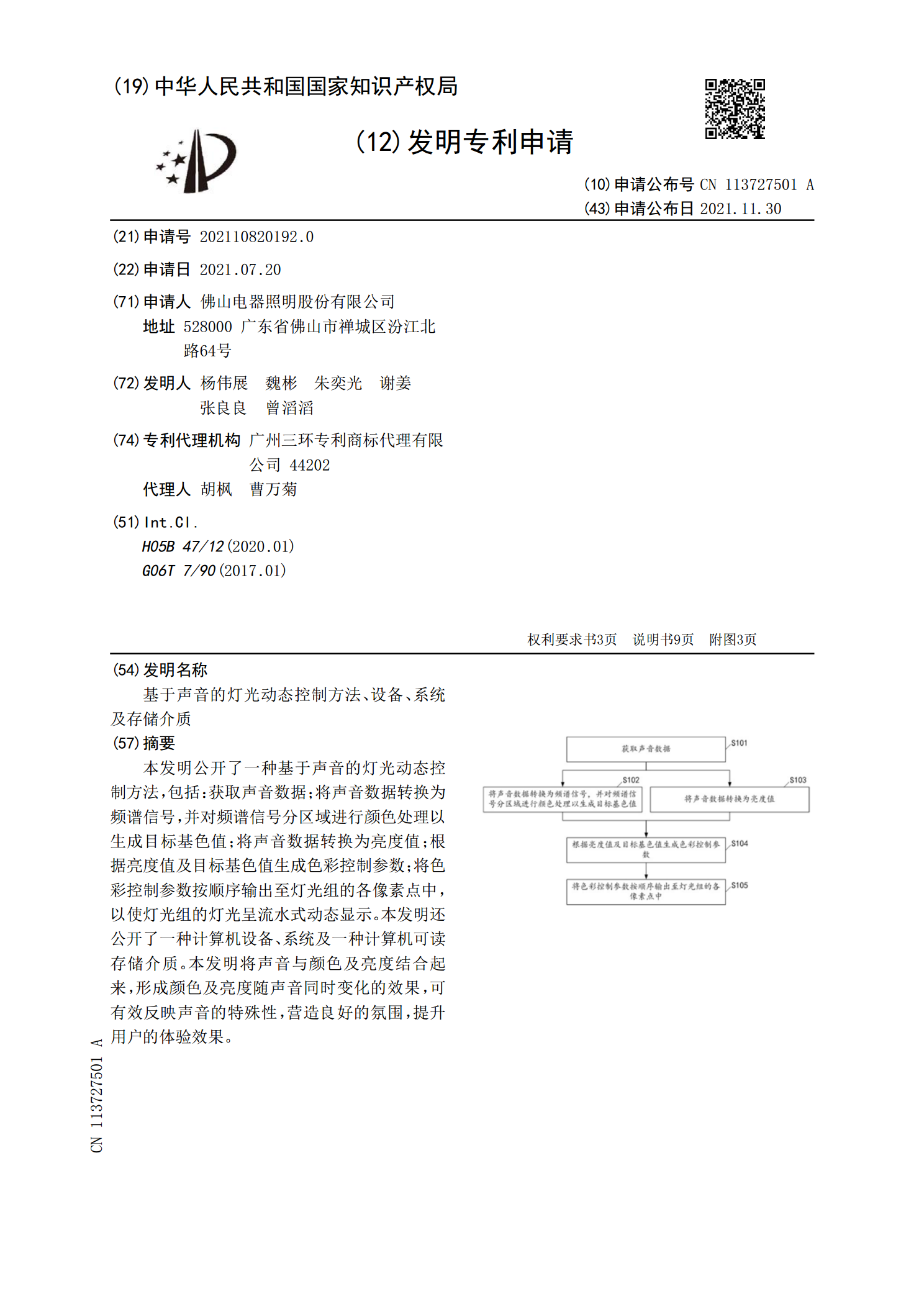
本发明公开了一种基于声音的灯光动态控制方法,包括:获取声音数据;将声音数据转换为频谱信号,并对频谱信号分区域进行颜色处理以生成目标基色值;将声音数据转换为亮度值;根据亮度值及目标基色值生成色彩控制参数;将色彩控制参数按顺序输出至灯光组的各像素点中,以使灯光组的灯光呈流水式动态显示。本发明还公开了一种计算机设备、系统及一种计算机可读存储介质。本发明将声音与颜色及亮度结合起来,形成颜色及亮度随声音同时变化的效果,可有效反映声音的特殊性,营造良好的氛围,提升用户的体验效果。
自适应模糊控制方法、系统、设备及介质.pdf
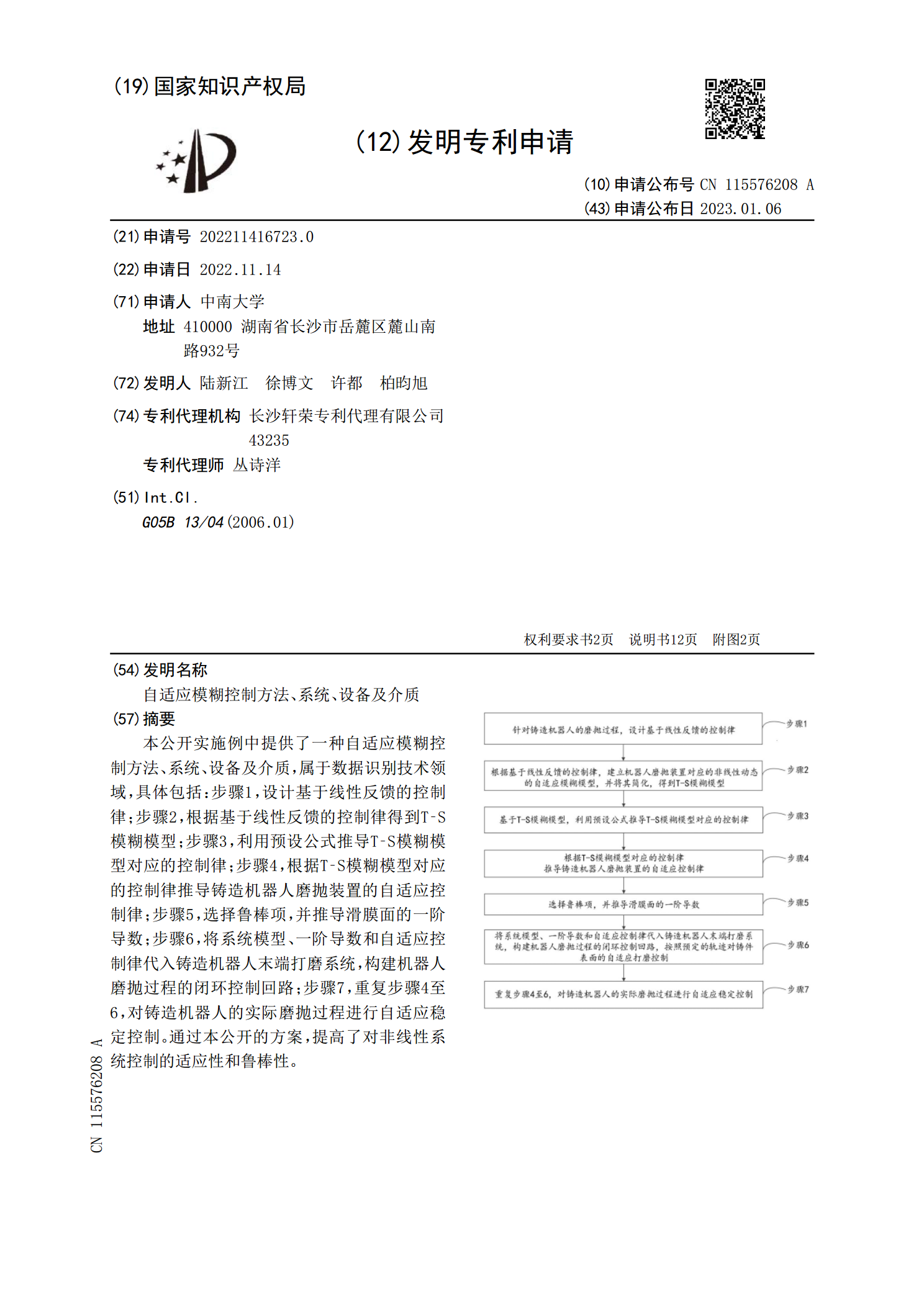
本公开实施例中提供了一种自适应模糊控制方法、系统、设备及介质,属于数据识别技术领域,具体包括:步骤1,设计基于线性反馈的控制律;步骤2,根据基于线性反馈的控制律得到T?S模糊模型;步骤3,利用预设公式推导T?S模糊模型对应的控制律;步骤4,根据T?S模糊模型对应的控制律推导铸造机器人磨抛装置的自适应控制律;步骤5,选择鲁棒项,并推导滑膜面的一阶导数;步骤6,将系统模型、一阶导数和自适应控制律代入铸造机器人末端打磨系统,构建机器人磨抛过程的闭环控制回路;步骤7,重复步骤4至6,对铸造机器人的实际磨抛过程进行

控制装置、心室辅助系统、动态控制方法、设备及可读介质.pdf
本发明涉及一种控制装置、心室辅助系统、动态控制方法、设备及可读介质,控制装置包括压差估计模块、流量估计模块及流量控制模块;压差估计模块,用于根据当前主动脉压力值及预设的压差估计模型计算当前估计压差;流量估计模块用于基于当前估计压差计算估计流量;流量控制模块,用于根据目标流量和估计流量生成控制指令,并下发所述控制指令至执行机构。通过该控制装置,能够实现心室辅助系统中流量与转速的级联控制,实现双闭环控制。
问卷展示动态控制方法、系统、电子设备及存储介质.pdf
本申请公开了一种问卷展示动态控制方法、系统、电子设备及可存储介质,本方法通过解析问卷信息,建立所述问卷信息的基本类模型和子类模型,所述基本类模型用于表征所述问卷信息,所述子类模型用于表征所述问卷信息中的题目的不同题型;响应于答题系统加载完成问卷信息后,创建所述问卷信息的全局对象变量和不同题型的模型对象;根据所述全局对象变量和不同题型的模型对象,响应于用户对所述题目的答案选项的操作,触发对所述问卷信息中题目的预设操作。本申请解决相关技术中现有问卷动态展示逻辑控制方法中编程员操作效率低下,容易出错的技术问题。