
自适应模糊控制方法、系统、设备及介质.pdf

增梅****主啊


1/10
2/10

3/10
4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自适应模糊控制方法、系统、设备及介质.pdf
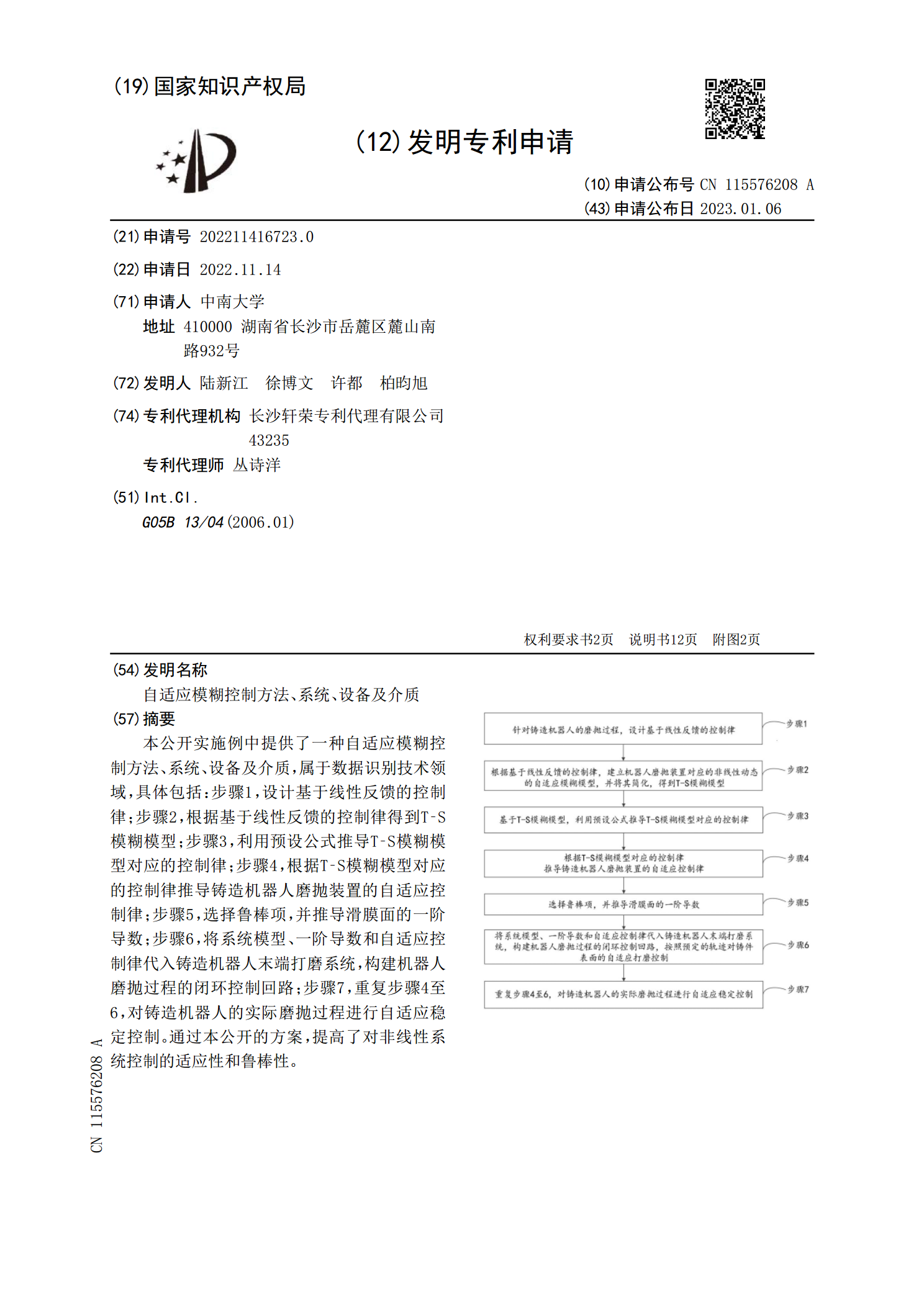
本公开实施例中提供了一种自适应模糊控制方法、系统、设备及介质,属于数据识别技术领域,具体包括:步骤1,设计基于线性反馈的控制律;步骤2,根据基于线性反馈的控制律得到T?S模糊模型;步骤3,利用预设公式推导T?S模糊模型对应的控制律;步骤4,根据T?S模糊模型对应的控制律推导铸造机器人磨抛装置的自适应控制律;步骤5,选择鲁棒项,并推导滑膜面的一阶导数;步骤6,将系统模型、一阶导数和自适应控制律代入铸造机器人末端打磨系统,构建机器人磨抛过程的闭环控制回路;步骤7,重复步骤4至6,对铸造机器人的实际磨抛过程进行
基于自适应模糊控制的锅炉引风调节系统及控制方法.pdf
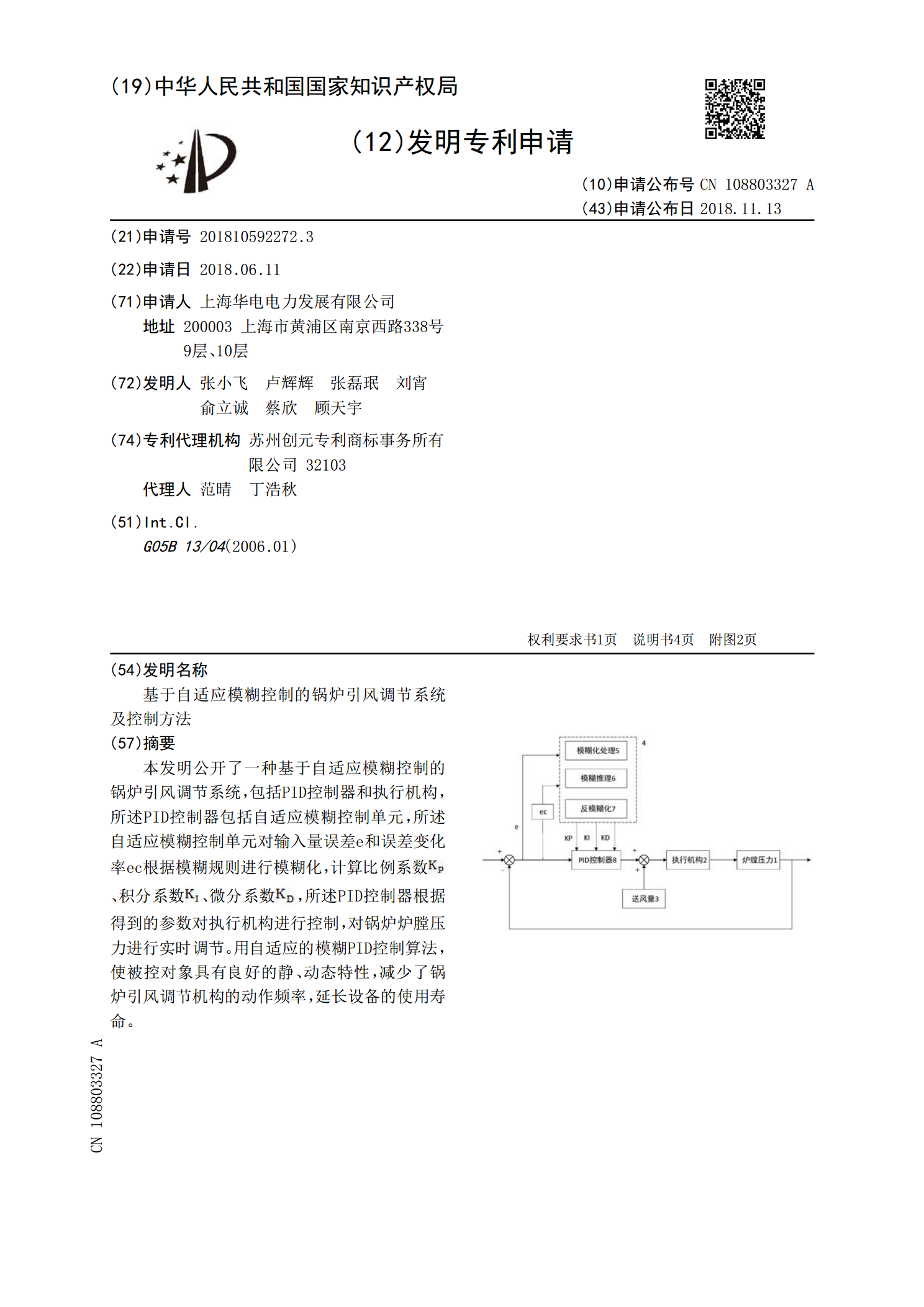
本发明公开了一种基于自适应模糊控制的锅炉引风调节系统,包括PID控制器和执行机构,所述PID控制器包括自适应模糊控制单元,所述自适应模糊控制单元对输入量误差e和误差变化率ec根据模糊规则进行模糊化,计算比例系数

自适应backstepping模糊控制方法.docx
自适应backstepping模糊控制方法摘要:本文介绍了自适应backstepping模糊控制方法的原理和实现步骤。该控制策略首先使用模糊控制器进行初步控制,然后使用backstepping方法进行后续控制,并通过自适应控制策略不断更新模糊控制器的参数,以提高控制精度和鲁棒性。文章将探讨该控制策略在工程实践中的应用,并对其性能进行一些评估。关键词:自适应backstepping;模糊控制;控制精度;鲁棒性;工程实践1.引言控制器在自动控制领域中起着至关重要的作用。控制器负责执行各种指令以保持系统稳定和良

基于模糊控制的亮度自适应方法、装置及视频放映系统.pdf
本发明涉及视频放映技术领域,尤其涉及一种基于模糊控制的亮度自适应方法、装置及视频放映系统,首先采集当前环境中的亮度信号;然后对采集到的亮度信号进行滤波和放大;最后根据完成滤波和放大的亮度信号基于模糊控制的原理计算需要输出的亮度的大小。本发明提供的装置和方法根据检测到的环境中的信息能够自动调节亮度的大小,不需要人工控制,自动化程度更高,符合人工智能的要求。
建筑遮阳自适应动态控制方法、系统及介质.pdf
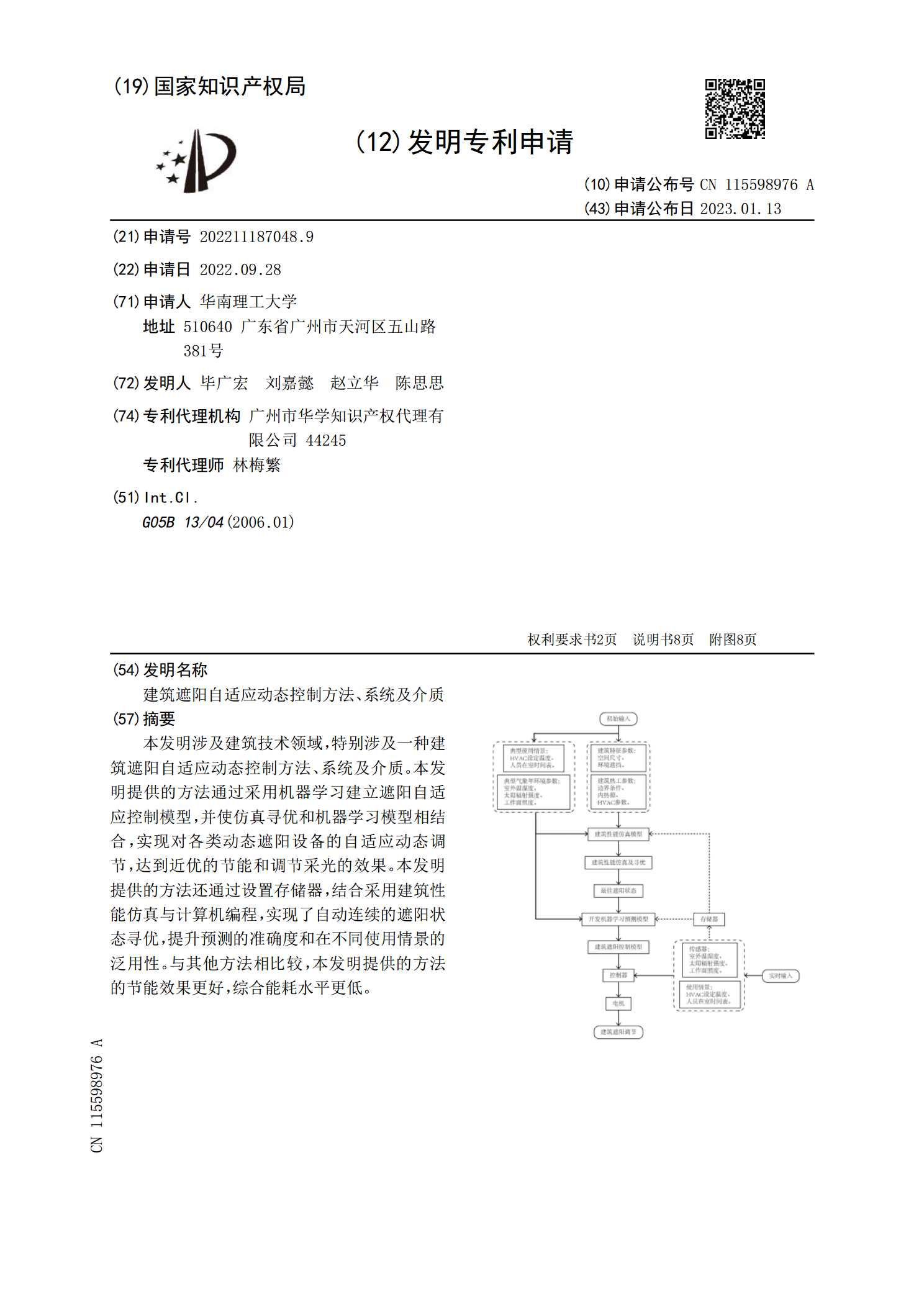
本发明涉及建筑技术领域,特别涉及一种建筑遮阳自适应动态控制方法、系统及介质。本发明提供的方法通过采用机器学习建立遮阳自适应控制模型,并使仿真寻优和机器学习模型相结合,实现对各类动态遮阳设备的自适应动态调节,达到近优的节能和调节采光的效果。本发明提供的方法还通过设置存储器,结合采用建筑性能仿真与计算机编程,实现了自动连续的遮阳状态寻优,提升预测的准确度和在不同使用情景的泛用性。与其他方法相比较,本发明提供的方法的节能效果更好,综合能耗水平更低。