
标定方法、环视图像生成方法、装置、设备及存储介质.pdf

雨巷****轶丽


1/10

2/10
3/10

4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
标定方法、环视图像生成方法、装置、设备及存储介质.pdf
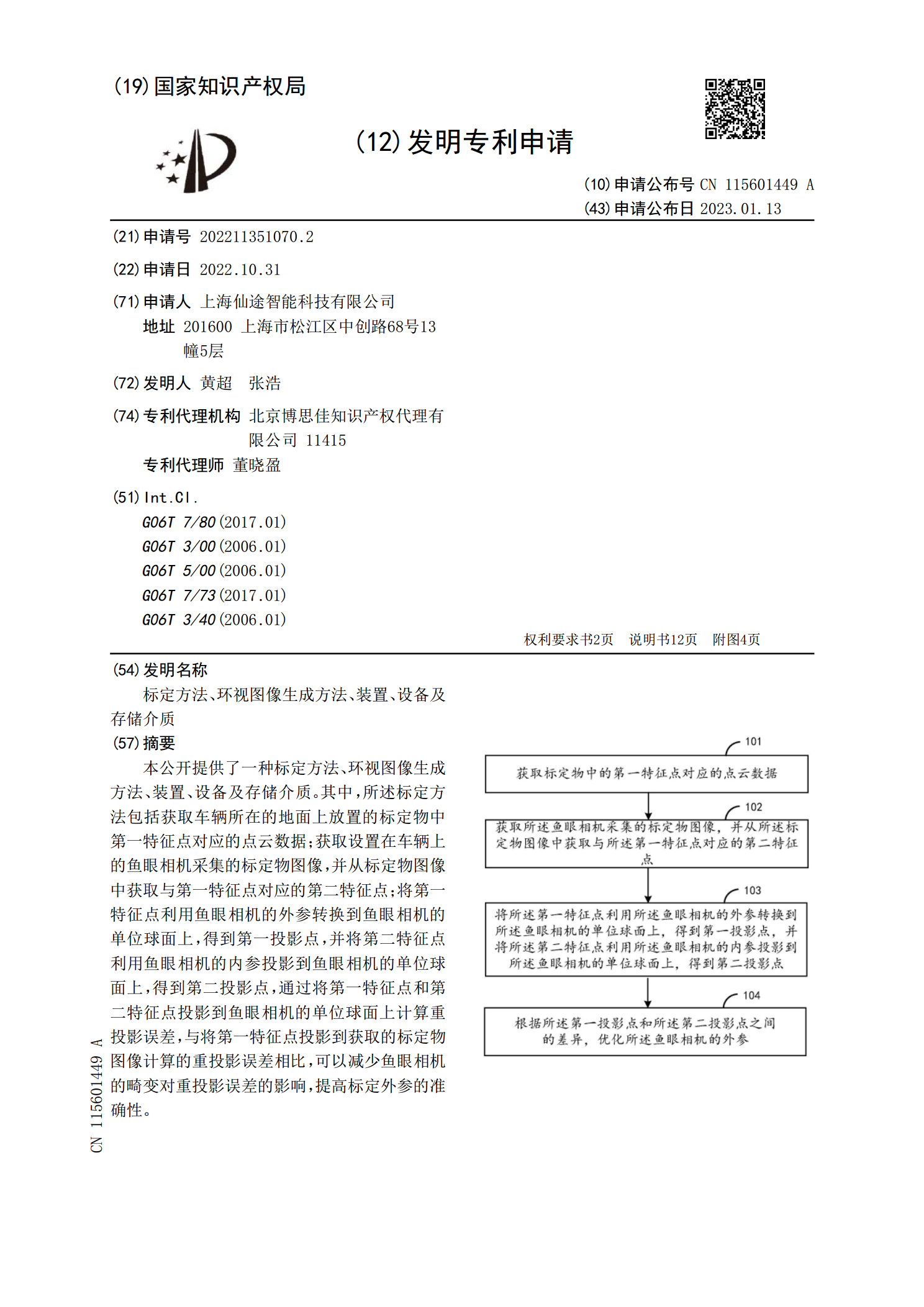
本公开提供了一种标定方法、环视图像生成方法、装置、设备及存储介质。其中,所述标定方法包括获取车辆所在的地面上放置的标定物中第一特征点对应的点云数据;获取设置在车辆上的鱼眼相机采集的标定物图像,并从标定物图像中获取与第一特征点对应的第二特征点;将第一特征点利用鱼眼相机的外参转换到鱼眼相机的单位球面上,得到第一投影点,并将第二特征点利用鱼眼相机的内参投影到鱼眼相机的单位球面上,得到第二投影点,通过将第一特征点和第二特征点投影到鱼眼相机的单位球面上计算重投影误差,与将第一特征点投影到获取的标定物图像计算的重投影
相机标定方法、图像生成方法、装置、设备以及存储介质.pdf
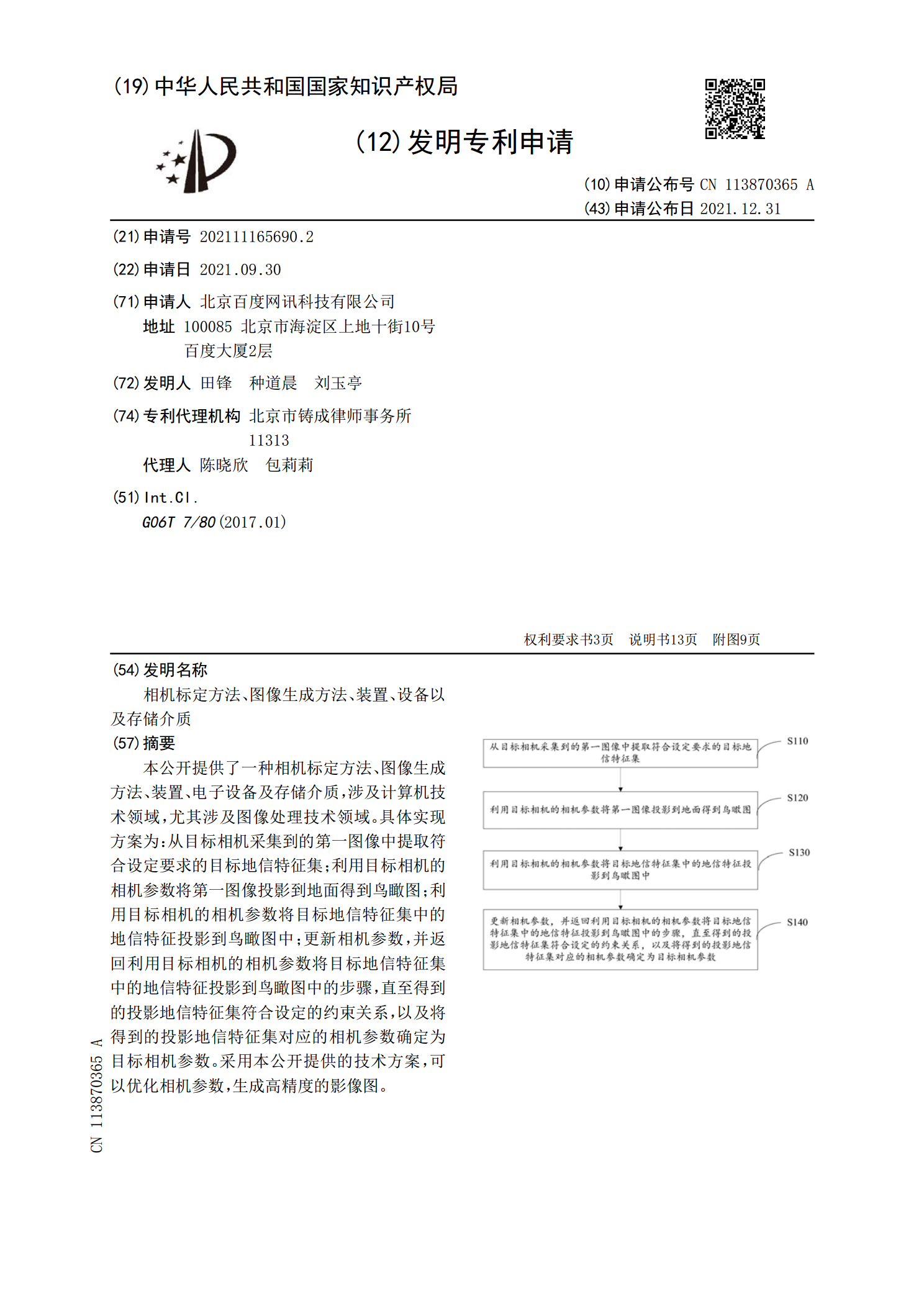
本公开提供了一种相机标定方法、图像生成方法、装置、电子设备及存储介质,涉及计算机技术领域,尤其涉及图像处理技术领域。具体实现方案为:从目标相机采集到的第一图像中提取符合设定要求的目标地信特征集;利用目标相机的相机参数将第一图像投影到地面得到鸟瞰图;利用目标相机的相机参数将目标地信特征集中的地信特征投影到鸟瞰图中;更新相机参数,并返回利用目标相机的相机参数将目标地信特征集中的地信特征投影到鸟瞰图中的步骤,直至得到的投影地信特征集符合设定的约束关系,以及将得到的投影地信特征集对应的相机参数确定为目标相机参数。
环视系统自动标定方法、汽车、标定装置及存储介质.pdf
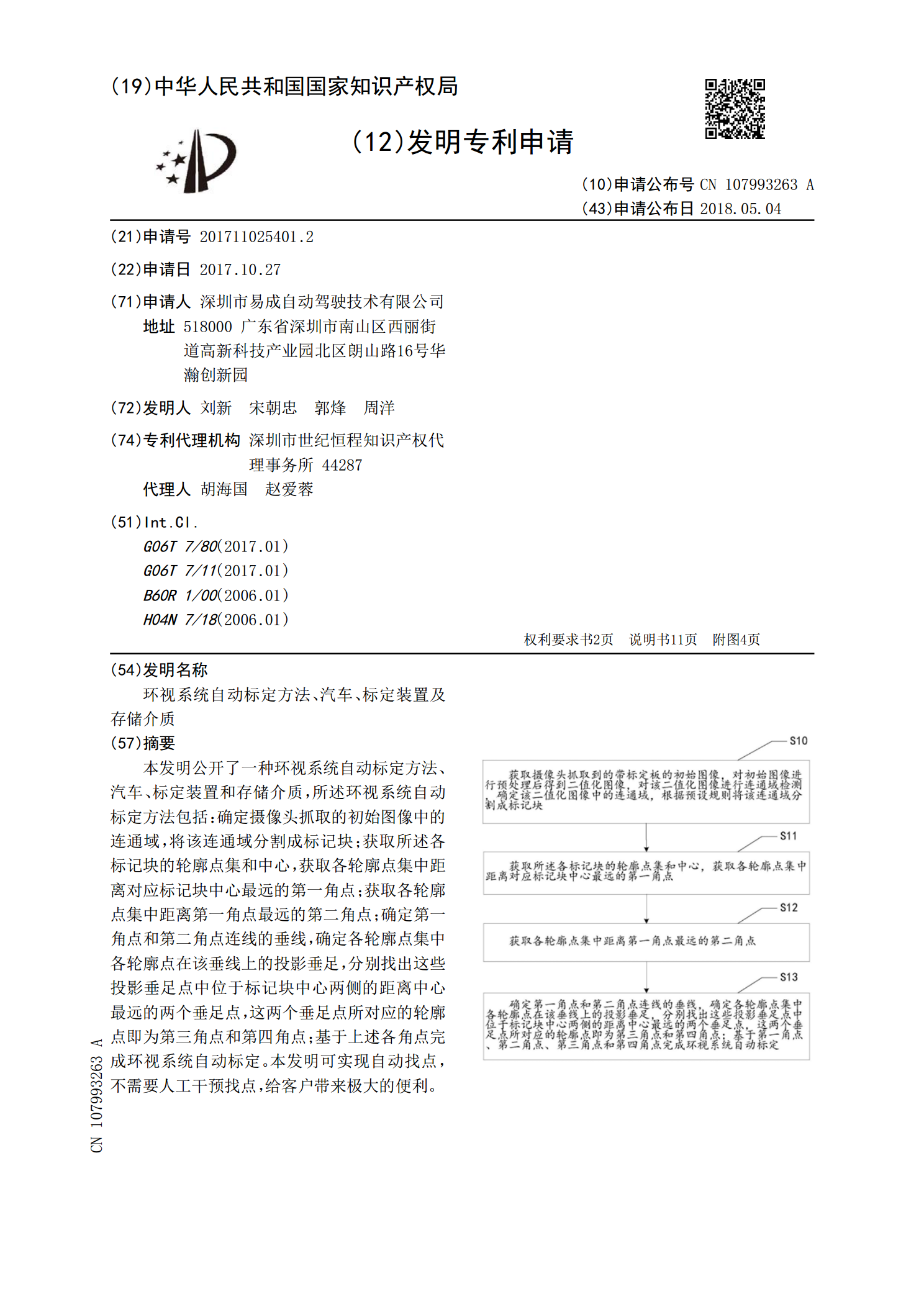
本发明公开了一种环视系统自动标定方法、汽车、标定装置和存储介质,所述环视系统自动标定方法包括:确定摄像头抓取的初始图像中的连通域,将该连通域分割成标记块;获取所述各标记块的轮廓点集和中心,获取各轮廓点集中距离对应标记块中心最远的第一角点;获取各轮廓点集中距离第一角点最远的第二角点;确定第一角点和第二角点连线的垂线,确定各轮廓点集中各轮廓点在该垂线上的投影垂足,分别找出这些投影垂足点中位于标记块中心两侧的距离中心最远的两个垂足点,这两个垂足点所对应的轮廓点即为第三角点和第四角点;基于上述各角点完成环视系统自

图像拍摄装置的参数标定方法、设备及存储介质.pdf
本申请提供了一种图像拍摄装置的参数标定方法、设备及计算机存储介质,通过获取图像拍摄装置的网络成像模型,并将在世界坐标系下位于目标对象上呈预设分布关系的输入点集的第一坐标作为成像网络模型的输入数据,以及基于输入点集的预设分布关系确定成像网络模型的输出点集需要满足的约束关系,以根据该约束关系构建成像网络模型的损失函数,有效的减小了成像网络模型在训练过程中的计算量,整个参数标定过程简单,容易实现。

图像生成方法、装置、设备及存储介质.pdf
本申请实施例公开了一种图像生成方法、装置、设备及存储介质,属于计算机图形学领域。所述方法包括:确定三维虚拟场景的多个可视点的坐标。以目标投射图像中的每个像素点为起始点,向所述三维虚拟场景发射虚拟光子,所述目标投射图像为当前需要仿真的场景对应的投射图像。基于该多个可视点中每个可视点周围的虚拟光子的光能,确定所述多个可视点中每个可视点的亮度。基于所述多个可视点中每个可视点的亮度,生成所述三维虚拟场景对应的图像。本申请实施例通过图像生成方法自动生成三维虚拟场景对应的图像,不需要实体场景和实体设备,这降低了图像生