
PID调节器参数整定分析.doc

可爱****乐多


1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
PID调节器参数整定分析.doc
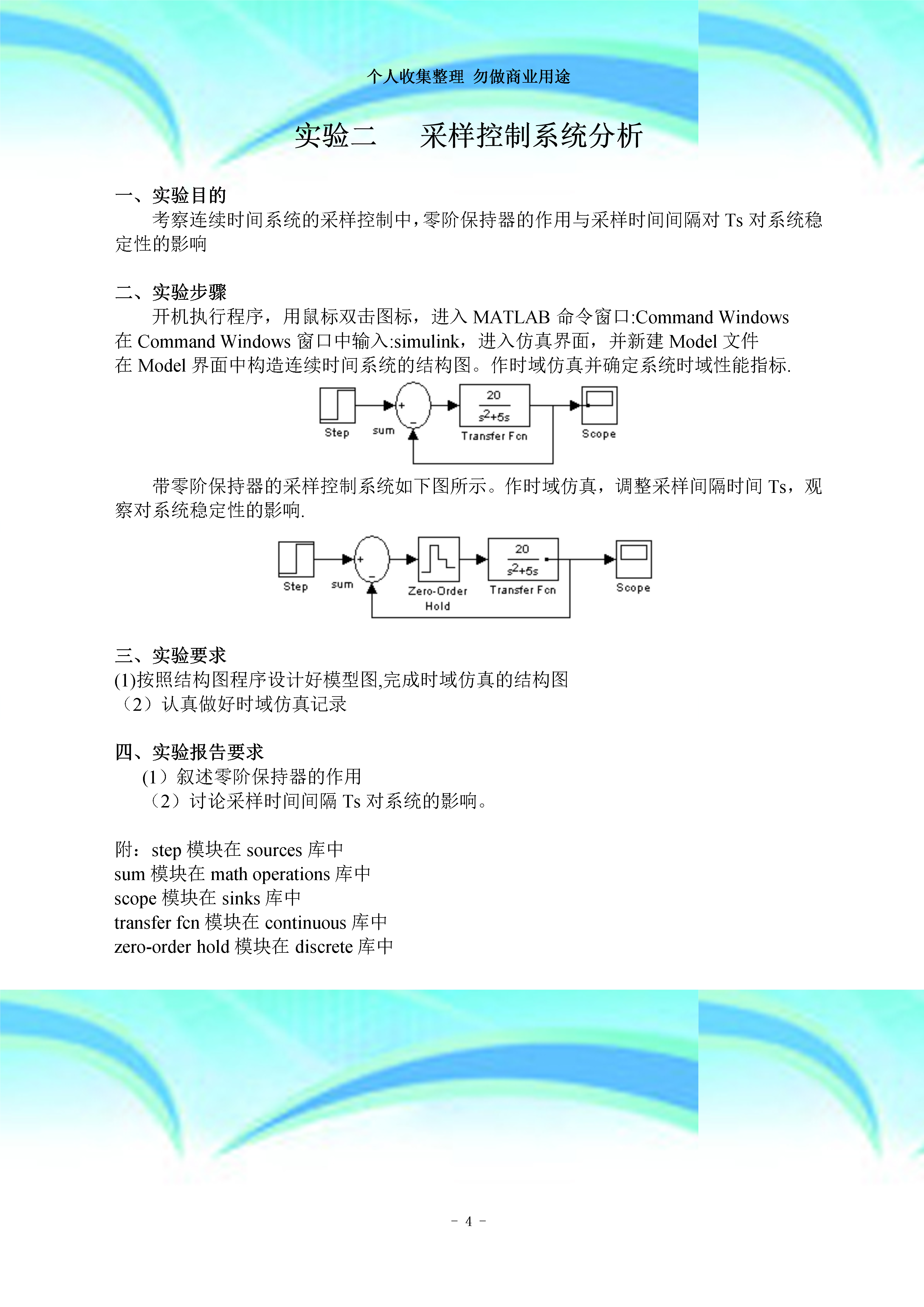
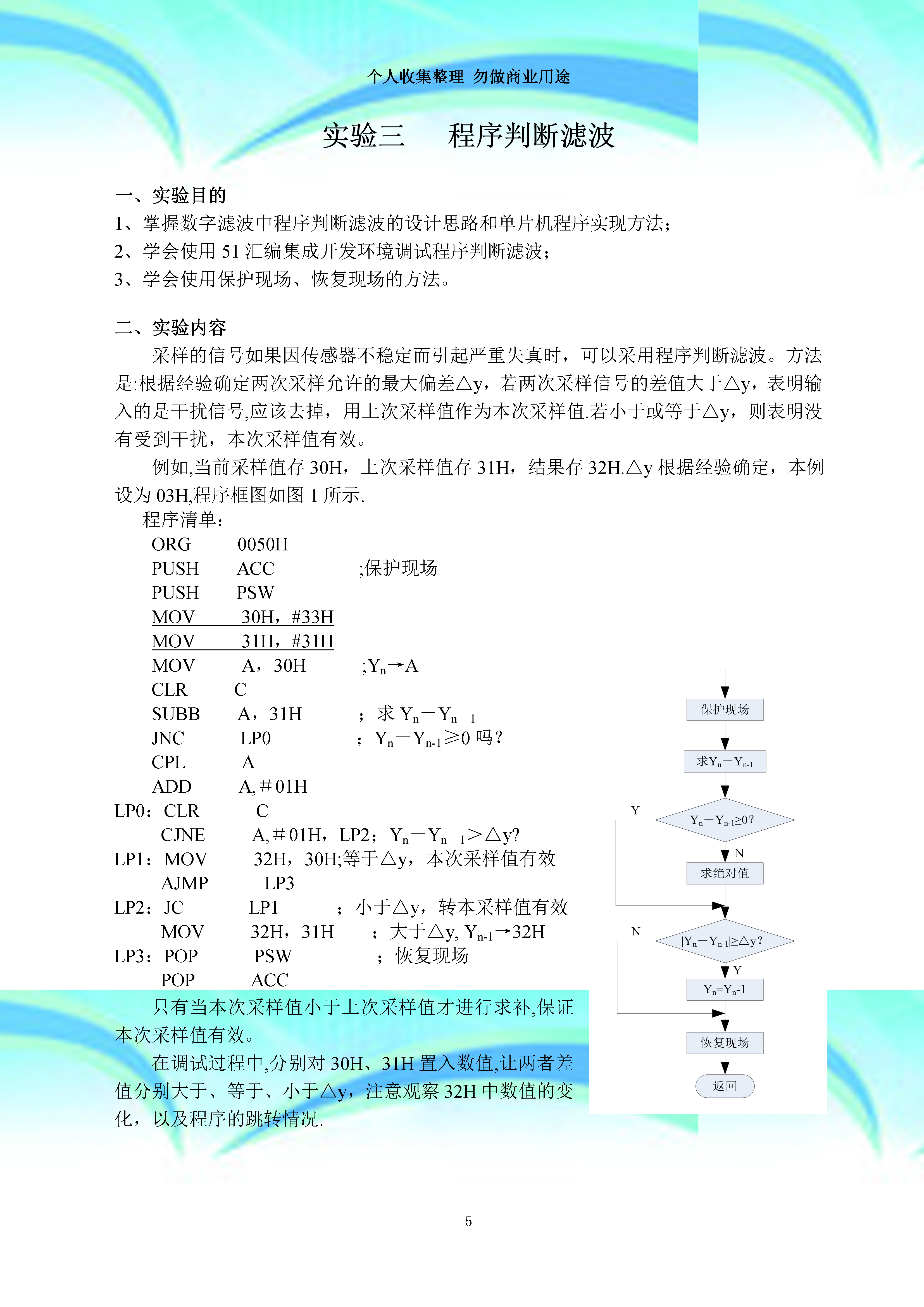
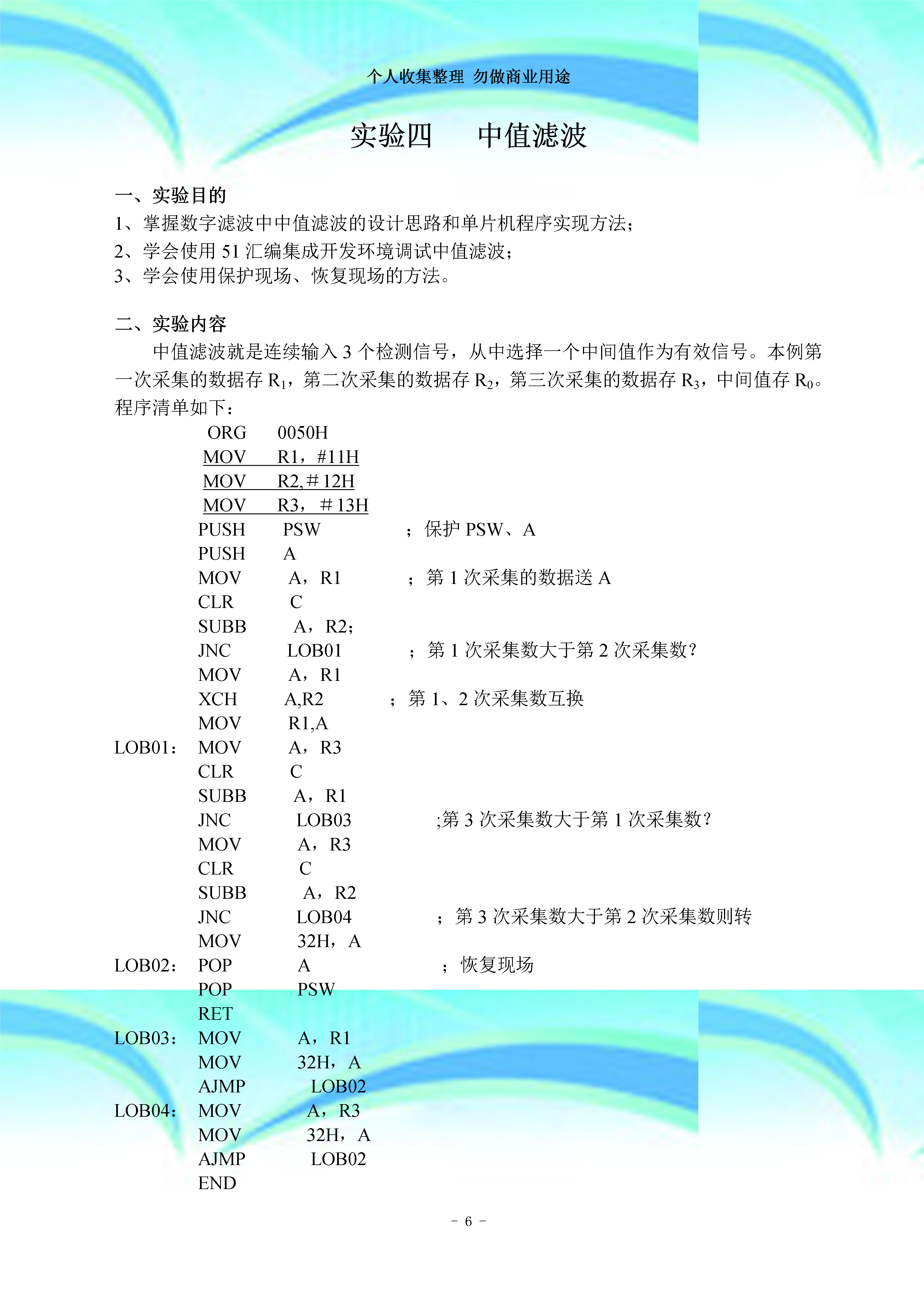
PID调节器参数整定分析3————————————————————————————————作者:————————————————————————————————日期:个人收集整理勿做商业用途个人收集整理勿做商业用途个人收集整理勿做商业用途《计算机控制技术》实验指导书(软件部分)编写:唐红雨黄海峰镇江高等专科学校电子信息系2007年3月-9-目录实验一PID调节器参数整定分析2实验二采样控制系统分析4实验三程序判断滤波5实验四中值滤波6实验五平均值滤波8实验一PID调节器参数整定分析一、实验目的设计MATL

PID参数自整定的多回路调节器及其应用.docx
PID参数自整定的多回路调节器及其应用PID参数自整定的多回路调节器及其应用摘要:PID(Proportional-Integral-Derivative)控制器是一种经典的反馈控制算法,广泛应用于工业过程控制中。但是,传统的PID控制器在应对多回路系统时存在一些局限性,例如参数调优困难、相互之间存在耦合等。为了解决这些问题,本文提出了一种基于自整定方法的多回路PID控制器,并考察其在某一工业过程中的应用。通过实验验证,表明该方法能够有效地优化多回路系统的控制性能。一、介绍PID控制器作为一种简单有效的控
智能控制仪表中的PID调节器参数自整定.pdf
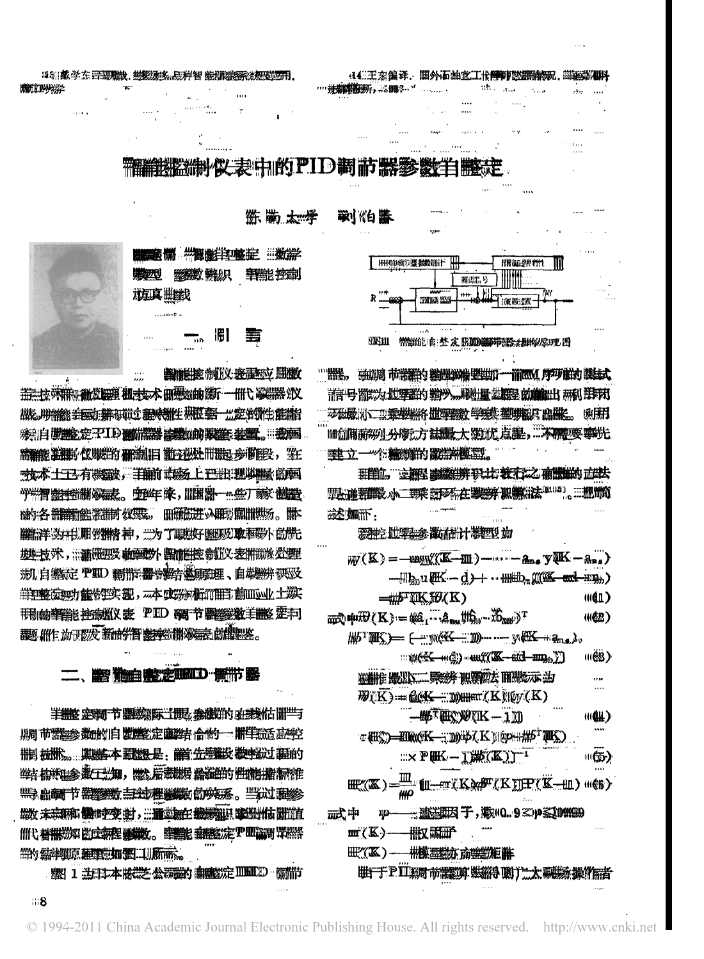
‘,��二��戴学东吕勇哉多级多品种智肩日周度系统及应用�王东编译国外石油化工计算机应用情况自动化科·一‘浙江大学技情报所,����二中‘丫书�、�者��’智能控制仪表中的���调节器参数自整定东南大学刘伯春一能自整定数学辉巧�训节珍参眨侧卜姗湘以栩乍性参数辨识智能控制辨�三��浅号十甘�沐仿真左‘线田����侧典��昭彼榨�生程引言智能自整定���姗节器结构原理图智能控制仪表是应用数�器,在调节器的拘毋端迭加一个城序列的溯途字技禾和微处理机技术开发的新一代仪器仪信号作为过程的输入,测量过程的输出,利用闭

PID参数整定.ppt
如何整定控制系统PID参数控制系统常见概念9:什么是放大倍数:比例度的倒数就是放大倍数(Kp=1/&),输入的相对变化量与输出相对变化量之比(积分时间和微分时间均未起作用)。10:什么是积分速度Ti:积分时间的倒数称为积分速度,积分时间单位一般为秒(S)。11:什么是微分时间Td:是描述微分作用强弱的一个物理量。调节器的输出表达式典型的控制系统的过度过程曲线3:等幅振荡过渡过程曲线4:发散振荡过度过程曲线调节作用强弱的判断过渡过程曲线的几个概念经验共享、仅供参考

PID参数整定.ppt
PID控制器的参数整定常用的工业PID控制器Kc对过渡过程的影响增益Kc的增大,使系统的调节作用增强,但稳定性下降(当系统稳定时,调节频率提高、最大偏差下降);Ti对系统性能的影响积分作用的增强(即Ti下降),使系统消除余差的速度增强,但稳定性下降;Td对系统性能的影响微分作用的增强(即Td增大),从理论上讲使系统的超前作用增强,稳定性得到加强,但高频噪声起放大作用。因而,微分作用不适合于测量噪声较大的对象。工业PID控制器的选择常规控制系统分析举例PID工程整定法1-经验法工程整定法2-临界比例度法工程