
李雅普诺夫直接法.ppt

和蔼****娘子

1/6

2/6
3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

李雅普诺夫直接法.ppt
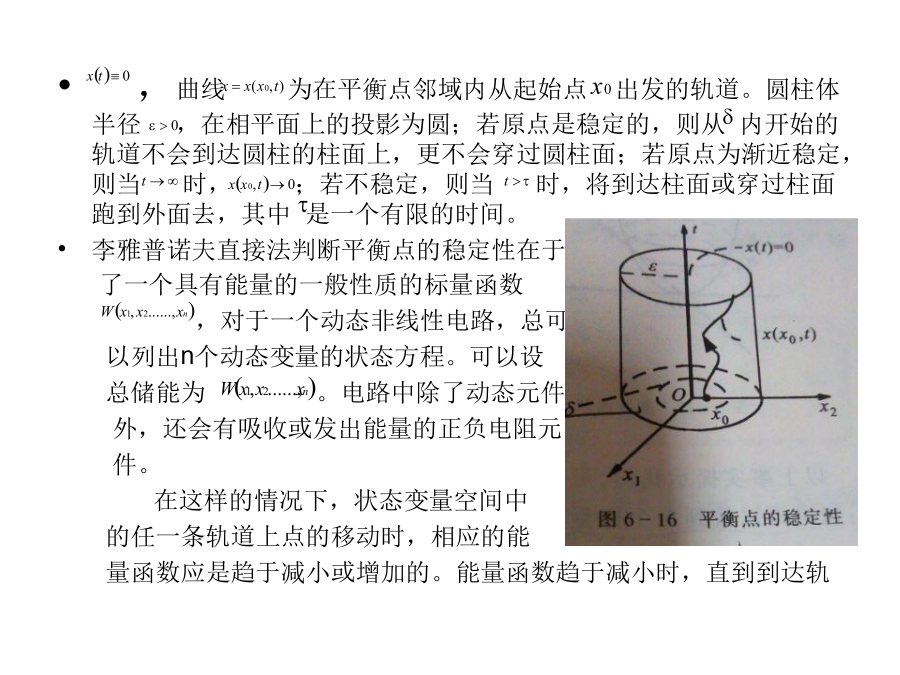
§6.5李雅普诺夫直接法李雅普诺夫直接法是一种不需要对方程进行求解就可以判定平衡点稳定与否的的定性方法。用李雅普诺夫直接法进行判断所确定的稳定性称为李雅普诺夫意义下的稳定性。1、适用情形当非线性电路的平衡点是非双曲平衡点,即其对应线性化后的矩阵A的特征值至少有一个是零实部时,平衡点的稳定性可以采用李雅普诺夫直接法(Liapunovdirectmethord)判定。2、平衡点按李雅普诺夫意义稳定的定义设描述电路的微分方程为,其中是一个列向量,是其平衡点,是偏离平衡点的任一轨道,而且轨道上的起始点与平衡点的偏
李雅普诺夫方法.ppt
第三章动态系统的稳定性及李雅普诺夫分析方法如果由非零初始状态引起的系统自由运动有界,即:二、李亚普诺夫稳定性基本概念对非线性系统,一般有多个平衡状态。可以将下式看成为状态空间中以为球心,以为半径的一个超球体,球域记为;把上式视为以为球心,以为半径的一个超球体,球域记为。球域依赖于给定的实数和初始时间。从球域内任一点出发的运动对所有的都不超越球域。满足渐近稳定的球域只是状态空间中的有限部分,这时称平衡状态为局部渐近稳定,并且称为渐近稳定吸引区,表示只有从该区域出发的受扰运动才能被“吸引”至平衡状态。3.不稳

李雅普诺夫方法.ppt
章动态系统的稳定性及李雅普诺夫如果由非零初始状态引起的系统自由运动有界,即:二、李亚普诺夫稳定性基本概念对非线性系统,一般有多个平衡状态。可以将下式看成为状态空间中以为球心,以为半径的一个超球体,球域记为;把上式视为以为球心,以为半径的一个超球体,球域记为。球域依赖于给定的实数和初始时间。从球域内任一点出发的运动对所有的都不超越球域。满足渐近稳定的球域只是状态空间中的有限部分,这时称平衡状态为局部渐近稳定,并且称为渐近稳定吸引区,表示只有从该区域出发的受扰运动才能被“吸引”至平衡状态。3.不稳定单摆是Ly

李雅普诺夫方法.ppt
第三章动态系统的稳定性及李雅普诺夫分析方法如果由非零初始状态引起的系统自由运动有界,即:二、李亚普诺夫稳定性基本概念对非线性系统,一般有多个平衡状态。可以将下式看成为状态空间中以为球心,以为半径的一个超球体,球域记为;把上式视为以为球心,以为半径的一个超球体,球域记为。球域依赖于给定的实数和初始时间。从球域内任一点出发的运动对所有的都不超越球域。满足渐近稳定的球域只是状态空间中的有限部分,这时称平衡状态为局部渐近稳定,并且称为渐近稳定吸引区,表示只有从该区域出发的受扰运动才能被“吸引”至平衡状态。3.不稳

稳定性与李雅普诺夫.pptx
第四章稳定性与李雅普诺夫措施4.稳定性与李雅普诺夫措施稳定性旳几种问题4.1李雅普诺夫有关稳定性旳定义系统旳平衡状态所研究系统旳齐次状态方程为x为n维状态矢量;f为与x同维旳矢量函数,而且是x与时间t旳函数,一般为时变旳非线性函数,假如不显函t,则为定常非线性系统。若存在状态矢量xe,对全部时间t都能使f(xe,t)≡0,称xe为系统旳平衡状态。线性定常系统旳平衡状态平衡状态需要满足Axe≡0当A为非奇异矩阵时,系统存在唯一旳平衡状态xe=0;当A为奇异矩阵时,系统将存在无穷多种平衡状态。非线性系统旳平衡