
基于STM32的航拍侦查四旋翼飞行器设计.docx

胜利****实阿


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于STM32的航拍侦查四旋翼飞行器设计.docx
基于STM32的航拍侦查四旋翼飞行器设计常猛汪洋徐伯乐孟康摘要:基于STM32的航拍侦查四旋翼飞行器设计,可以用于森林防火防盗巡逻、电力巡检等方面,减少了人工投入,从而使企业利益最大化。同时也减少了维护人员身体受伤的可能性,因此以四轴飞行器为平台的远程图像勘测就变得非常受青睐。四轴飞行器作为无人机的一种,能够垂直起落、空中悬停,适用于各种飞行速度与飞行剖面,具有灵活性高、安全性好、便于控制、体积小等众多优势,同时还能携带多种小型设备。本项目通过对四旋翼飛行器进行研究,分析其结构特点、飞行原理,设计合适的飞

基于ARM的一种无人航拍旋翼飞行器设计.docx
基于ARM的一种无人航拍旋翼飞行器设计基于ARM的一种无人航拍旋翼飞行器设计摘要:随着航拍技术的不断发展,无人航拍飞行器逐渐成为了重要的工具。本文提出了一种基于ARM的无人航拍旋翼飞行器设计。该设计利用ARM处理器来实现飞行控制和图像处理,提高了飞行器的稳定性和图像质量。通过详细的设计和实验验证,结果表明该设计达到了预期的效果。关键词:无人航拍飞行器、ARM处理器、飞行控制、图像处理、稳定性、图像质量1.引言无人航拍飞行器作为一种新兴的技术工具,被广泛应用于摄影、测绘、农业等领域。为了提高飞行器的稳定性和
一种四旋翼航拍飞行器.pdf
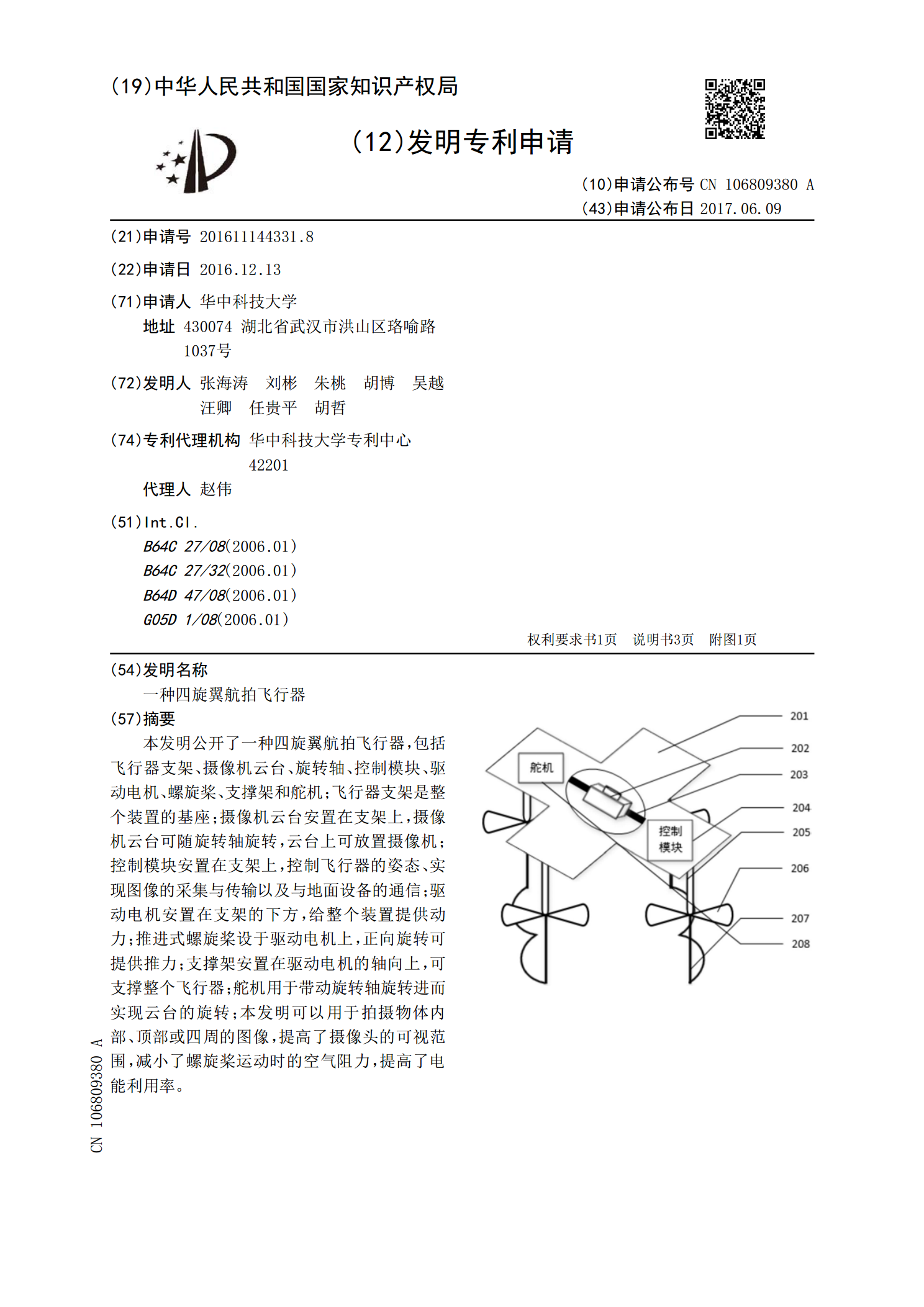
本发明公开了一种四旋翼航拍飞行器,包括飞行器支架、摄像机云台、旋转轴、控制模块、驱动电机、螺旋桨、支撑架和舵机;飞行器支架是整个装置的基座;摄像机云台安置在支架上,摄像机云台可随旋转轴旋转,云台上可放置摄像机;控制模块安置在支架上,控制飞行器的姿态、实现图像的采集与传输以及与地面设备的通信;驱动电机安置在支架的下方,给整个装置提供动力;推进式螺旋桨设于驱动电机上,正向旋转可提供推力;支撑架安置在驱动电机的轴向上,可支撑整个飞行器;舵机用于带动旋转轴旋转进而实现云台的旋转;本发明可以用于拍摄物体内部、顶部或

四旋翼飞行器航拍控制系统的设计与仿真验证.docx
四旋翼飞行器航拍控制系统的设计与仿真验证四旋翼飞行器航拍控制系统的设计与仿真验证摘要:随着无人机技术的发展,四旋翼飞行器逐渐走进人们的视野。其灵活的悬停能力以及航拍功能使其成为航空摄影、地理测绘等领域的重要工具。本论文主要研究四旋翼飞行器的航拍控制系统设计与仿真验证。首先,介绍了四旋翼飞行器的工作原理以及航拍功能的基本要求。然后,详细描述了航拍控制系统的设计思路和流程,并给出了相应的数学模型。接下来,使用仿真工具对设计方案进行了验证,并对仿真结果进行了分析。最后,通过实际飞行测试对仿真结果进行了验证,并进

基于STM32的四旋翼飞行器设计与实现.docx
基于STM32的四旋翼飞行器设计与实现基于STM32的四旋翼飞行器设计与实现摘要:随着科技的发展和无人机的快速发展,四旋翼飞行器被广泛应用于各个领域。本文基于STM32单片机设计和实现了一种具有稳定飞行和自主控制的四旋翼飞行器。首先介绍了四旋翼飞行器的原理和结构,然后详细阐述了飞行器的硬件设计和软件设计,包括传感器的选择与接口设计、飞行控制算法的设计以及通信模块的设计。最后进行了实际飞行试验,并对飞行器的性能进行了评估。试验结果表明,该四旋翼飞行器具有良好的稳定性和控制性能,可以满足实际应用需求。关键词: