
基于贝叶斯估计的信息融合方法研究.doc

一只****爱敏


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于贝叶斯估计的信息融合方法研究.doc
基于贝叶斯估计的信息融合方法研究基于贝叶斯估计的信息融合方法研究基于贝叶斯估计的信息融合方法研究基于贝叶斯估计的信息融合方法研究摘要:为了有效融合多个传感器的测量数据,得到准确的融合结果,本文以置信距离测度作为数据融合的融合度,利用分位图法,通过置信距离矩阵、关系矩阵寻找多传感器的最佳融合数,并以Bayes估计理论为基础得到多传感器最优融合数据,最后将它与其它方法得到的融合数据进行了比较。关键词:Bayes估计;信息融合;分位图;传感器StudyonInformationFusionMethodsBase

基于贝叶斯估计的信息融合方法研究.doc
基于贝叶斯估计的信息融合方法研究基于贝叶斯估计的信息融合方法研究基于贝叶斯估计的信息融合方法研究基于贝叶斯估计的信息融合方法研究摘要:为了有效融合多个传感器的测量数据,得到准确的融合结果,本文以置信距离测度作为数据融合的融合度,利用分位图法,通过置信距离矩阵、关系矩阵寻找多传感器的最佳融合数,并以Bayes估计理论为基础得到多传感器最优融合数据,最后将它与其它方法得到的融合数据进行了比较。关键词:Bayes估计;信息融合;分位图;传感器StudyonInformationFusionMethodsBase

基于信息融合的诊断贝叶斯网络研究.docx
基于信息融合的诊断贝叶斯网络研究随着信息技术的不断发展,人们的生活和工作中正在出现越来越多的复杂问题。特别是在医疗领域中,医生需要面对大量的病人信息和疾病诊断结果,并根据这些信息进行决策。然而,由于疾病的复杂性和诊断过程中存在的不确定性,医生往往需要根据多个变量来进行诊断和决策,这使得诊断过程变得更加复杂和困难。因此,基于信息融合的诊断贝叶斯网络成为了一个热门的研究领域。诊断贝叶斯网络(DiagnosisBayesianNetwork,简称DBN)是一种基于概率模型的诊断工具,其主要目的是通过对变量之间的
基于融合中心反馈信息的多目标贝叶斯波达方向估计方法.pdf
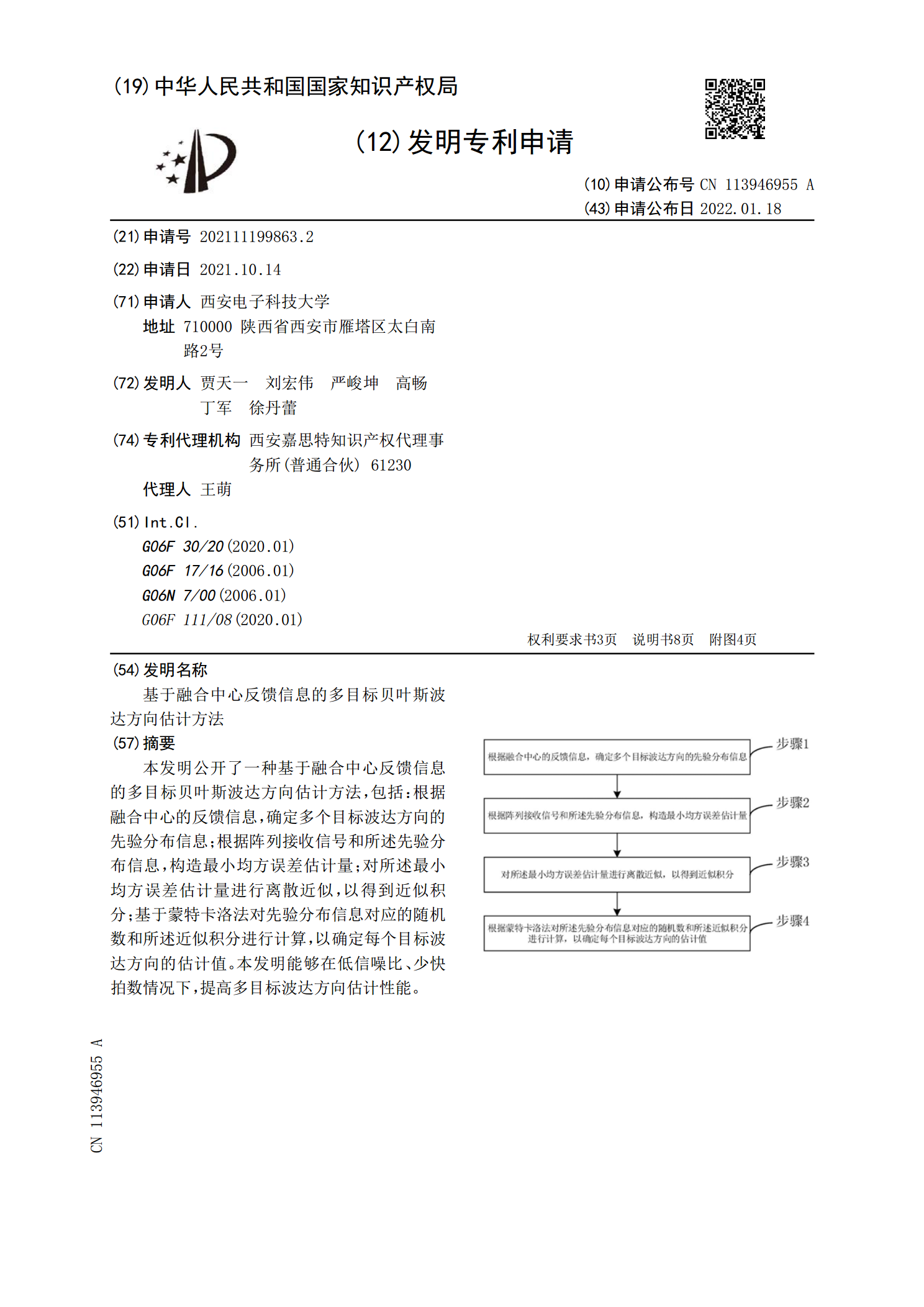
本发明公开了一种基于融合中心反馈信息的多目标贝叶斯波达方向估计方法,包括:根据融合中心的反馈信息,确定多个目标波达方向的先验分布信息;根据阵列接收信号和所述先验分布信息,构造最小均方误差估计量;对所述最小均方误差估计量进行离散近似,以得到近似积分;基于蒙特卡洛法对先验分布信息对应的随机数和所述近似积分进行计算,以确定每个目标波达方向的估计值。本发明能够在低信噪比、少快拍数情况下,提高多目标波达方向估计性能。
卫星多源信息贝叶斯融合方法研究.pptx
汇报人:CONTENTS添加章节标题卫星多源信息融合概述信息融合的定义和重要性卫星多源信息的特点和挑战贝叶斯融合方法简介贝叶斯融合方法理论基础贝叶斯概率理论贝叶斯网络模型贝叶斯推理算法贝叶斯融合模型建立卫星多源信息融合流程数据预处理特征提取模型选择与训练融合结果评估与优化贝叶斯融合方法在卫星多源信息融合中的应用遥感图像融合气象卫星数据融合导航定位信息融合综合信息融合应用案例贝叶斯融合方法优缺点分析优点分析缺点分析改进方向与未来发展结论与展望研究成果总结对未来研究的建议与展望汇报人: