预览加载中,请您耐心等待几秒...
预览加载中,请您耐心等待几秒...
1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
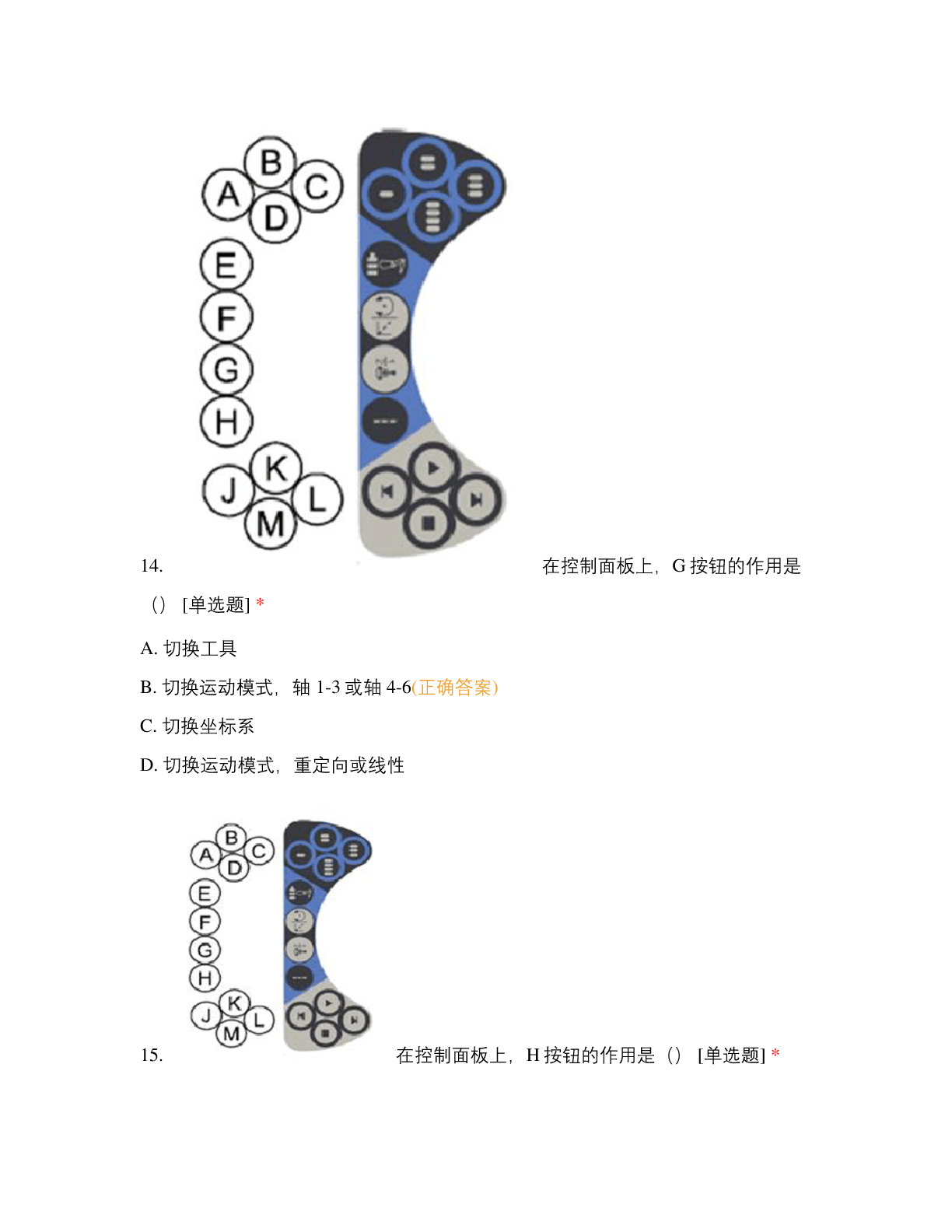
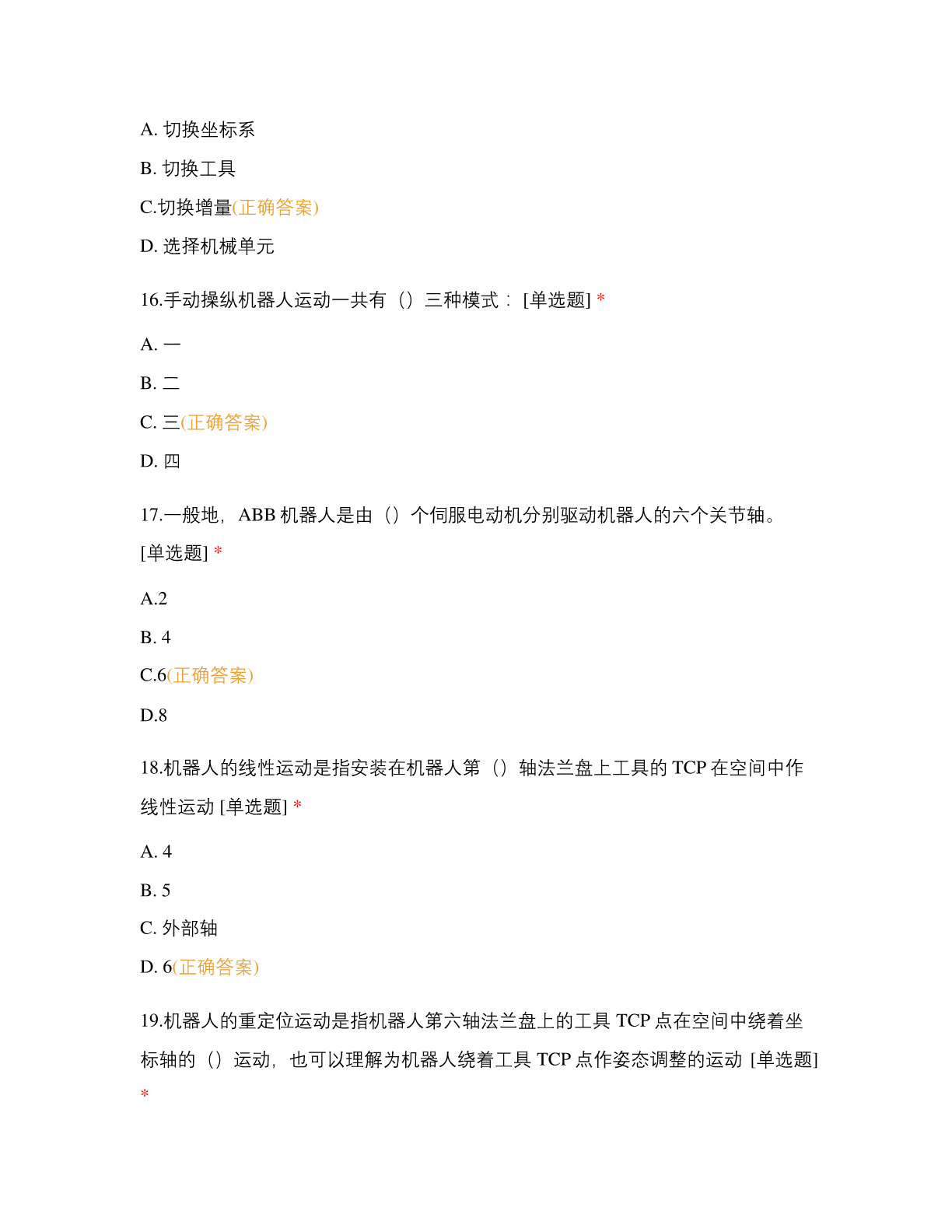
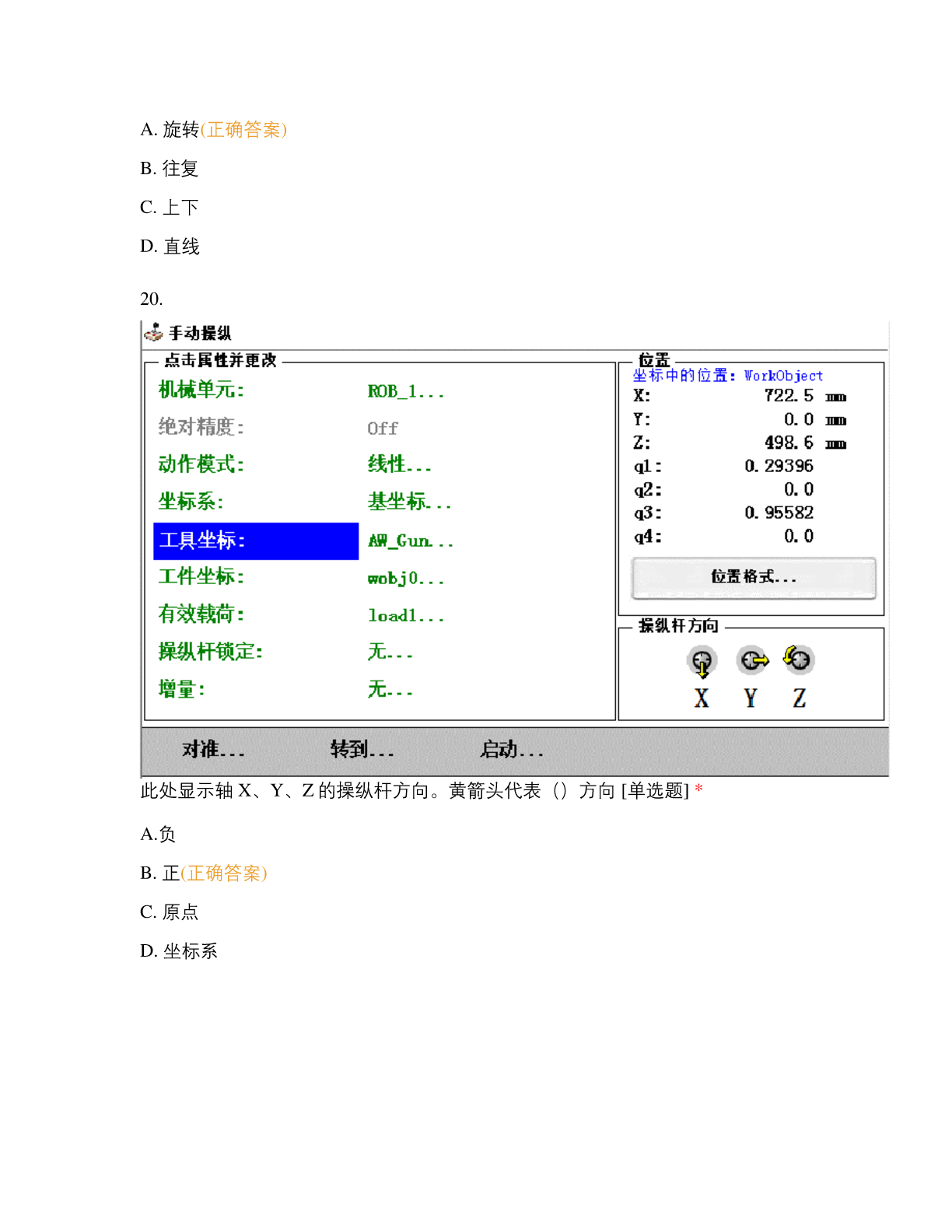
工业机器人编程及操作试卷1.工业机器人的最初应用是在汽车和工程机械行业,主要用于汽车及工程机械的()。[单选题]*维修及打磨喷涂及焊接(正确答案)热处理和锻造挖掘和建造2.我国工业机器人的使用集中在()等地。[单选题]*A.东部(正确答案)B.中部C.西部D.西南部3.机器人中的传感器作用日益重要,除传统的位置、速度、加速度等内部传感器外,()、力觉、声觉、触觉等多传感器的融合技术在产品化系统中已有成熟应用。[单选题]*A.味觉B.距离C.听觉D.视觉(正确答案)4.工业机器人分类按()分点焊、弧焊、搬运、喷漆、涂胶、装配等机器人;[单选题]*A.环境B.用途(正确答案)C.价格D.厂家5.按()分直角坐标、极(球)坐标、圆柱坐标、关节式和组合式机器人;[单选题]*A.角度B.方向C.形状D.运动形式(正确答案)6.工业机器人分类按()分点位控制和连续轨迹控制。[单选题]*A.自由度B.使用场景C.控制方式(正确答案)D.本体重量7.工业机器人分类按()气动、液压驱动和电动。[单选题]*A.生产厂家B.工作环境C.使用用途D.驱动方式(正确答案)8.目前,大部分机器人应用仍采用示教编程方式,并且主要集中在、码垛、()焊接等领域。[单选题]*A.装修B.教育C.搬运(正确答案)D.娱乐9.机器人应用采用示教编程方式优点:()不需要环境模型;对实际的机器人进行示教时,可以修正机械结构带来的误差。[单选题]*A.编程门槛低、简单方便(正确答案)B.经济实惠C.对控制方式的要求严格,能实现精确控制D.示教过程不容易发生事故10.离线编程,是通过软件,在电脑里重建整个工作场景的三维虚拟环境,然后软件可以根据要工加零件的大小、形状、材料,同时配合软件操作者的一些操作,自动生成机器人的(),即控制指令,然后在软件中仿真与调整轨迹,最后生成机器人程序传输给机器人。[单选题]*A.整体尺寸B.虚拟仿真动作C.运动点数量D.运动轨迹(正确答案)11.在控制面板上,预留了()个可编程按钮。[单选题]*A.1B.2C.3D.4(正确答案)12.在控制面板上,E按钮的作用是()[单选题]*A.选择机械单元(正确答案)B.选择手动速度C.切换坐标系D.切换工具13.在控制面板上,F按钮的作用是[单选题]*切换运动模式,轴1-3或轴4-6选择机械单元切换运动模式,重定向或线性(正确答案)选项321切换坐标系14.在控制面板上,G按钮的作用是()[单选题]*A.切换工具B.切换运动模式,轴1-3或轴4-6(正确答案)C.切换坐标系D.切换运动模式,重定向或线性15.在控制面板上,H按钮的作用是()[单选题]*A.切换坐标系B.切换工具C.切换增量(正确答案)D.选择机械单元16.手动操纵机器人运动一共有()三种模式:[单选题]*A.一B.二C.三(正确答案)D.四17.一般地,ABB机器人是由()个伺服电动机分别驱动机器人的六个关节轴。[单选题]*A.2B.4C.6(正确答案)D.818.机器人的线性运动是指安装在机器人第()轴法兰盘上工具的TCP在空间中作线性运动[单选题]*A.4B.5C.外部轴D.6(正确答案)19.机器人的重定位运动是指机器人第六轴法兰盘上的工具TCP点在空间中绕着坐标轴的()运动,也可以理解为机器人绕着工具TCP点作姿态调整的运动[单选题]*A.旋转(正确答案)B.往复C.上下D.直线20.此处显示轴X、Y、Z的操纵杆方向。黄箭头代表()方向[单选题]*A.负B.正(正确答案)C.原点D.坐标系21.显示选项A完成的操作是()[单选题]*选择当前使用的工件坐标坐标系选择碰撞监控开/关选择当前使用的工具数据(正确答案)22.ABB标准I/O板是挂在()网络上的,所以要设定模块在网络中的地址。[单选题]*A.DeviceNet(正确答案)B.ProfibusC.ProfiNetD.modbus23.以下是数字数据的为()。[单选题]*A.bollB.num(正确答案)C.clockD.wobjdata24.ABB机器人的程序数据共有()个[单选题]*A.25B.50C.76(正确答案)D.10025.bool代表以下哪一种程序数据()[单选题]*A数字输入/输出信号(正确答案)B.工具数据C.布尔量D.字符串26.以下哪一种是ABB机器人数字输出信号()[单选题]*A.DI1B.DO1(正确答案)C.AI1D.AO127.ABB机器人是由()个伺服电动[单选题]*A.3B.4(正确答案)C.5D.628.手动操纵机器人运动一共有()种运动模式[单选题]*A.2B.3(正确答案)C.4D.529.下面四个运动指令哪一个指令走的是回原点直线()[单选题]*A.MoveJB.MoveLC.MoveCD.MoveAbsJ(正确答案)30.基本运