
FANUC数字伺服系统的调整.pdf

文库****品店


1/5
2/5
3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
FANUC数字伺服系统的调整.pdf
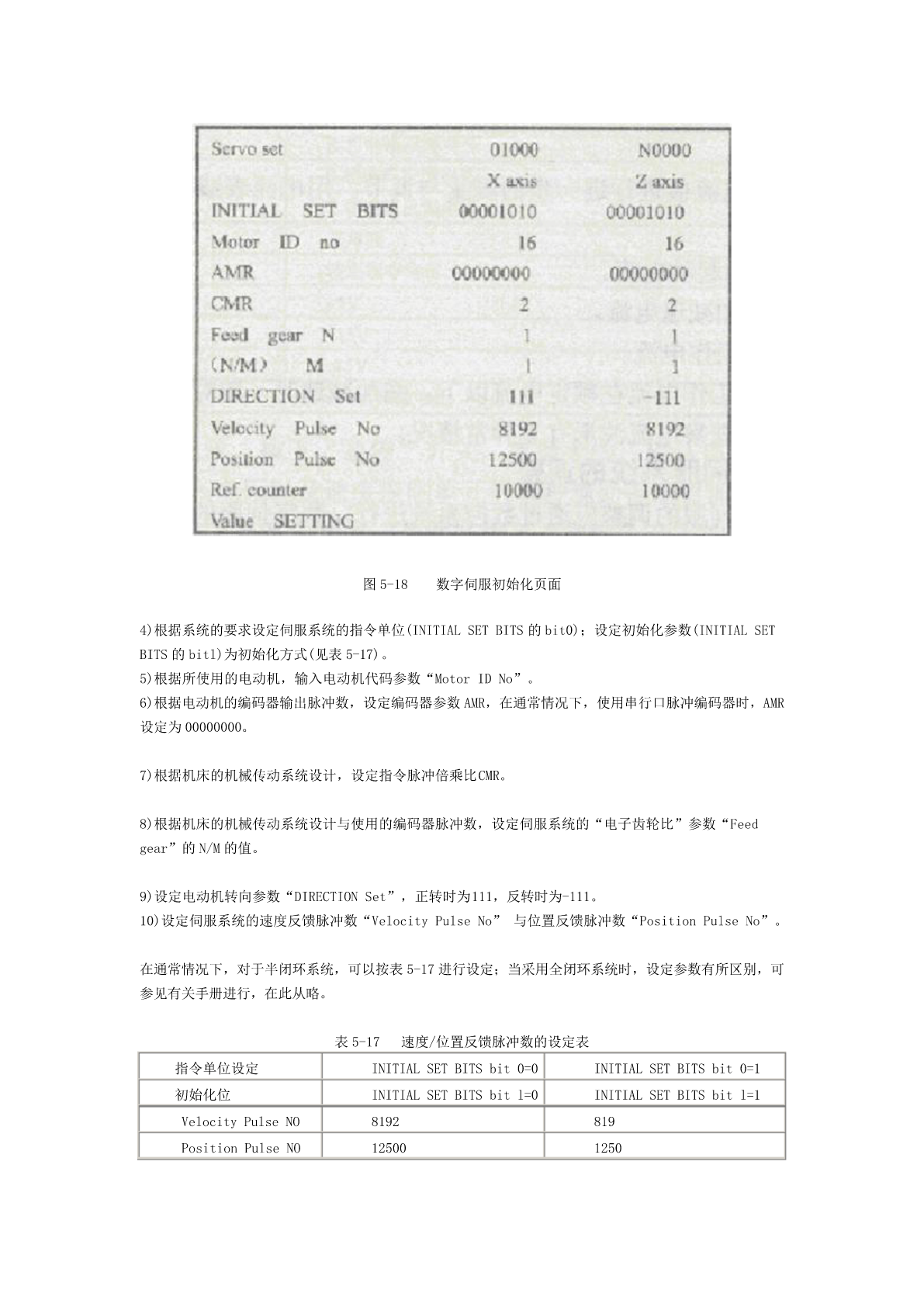
FANUC数字伺服系统的调整通常情况下,数字伺服的调整应通过数控系统进行,数字伺服的调整可分为初始化与动态性能调整两部分。1.FANUC数字伺服的初始化当数控系统的伺服驱动更换,或因为更换电池等原因,使伺服参数出现错误时,必须对伺服系统进行初始化处理与重新调整。数字伺服的初始化步骤如下。(1)初始化的准备在初始化数字伺服前,应首先确认以下基本数据,以便进行初始化工作。1)数控系统的型号。2)伺服电动机的型号、规格、电动机代码。3)电动机内装的脉冲编码器的型号、规格。4)伺服系统是否使用外部位置检测器件,如
FANUC数字伺服系统的调整.pdf
FANUC数字伺服系统的调整通常情况下,数字伺服的调整应通过数控系统进行,数字伺服的调整可分为初始化与动态性能调整两部分。1.FANUC数字伺服的初始化当数控系统的伺服驱动更换,或因为更换电池等原因,使伺服参数出现错误时,必须对伺服系统进行初始化处理与重新调整。数字伺服的初始化步骤如下。(1)初始化的准备在初始化数字伺服前,应首先确认以下基本数据,以便进行初始化工作。1)数控系统的型号。2)伺服电动机的型号、规格、电动机代码。3)电动机内装的脉冲编码器的型号、规格。4)伺服系统是否使用外部位置检测器件,如
FANUC数字伺服系统的调整.pdf
FANUC数字伺服系统的调整通常情况下,数字伺服的调整应通过数控系统进行,数字伺服的调整可分为初始化与动态性能调整两部分。1.FANUC数字伺服的初始化当数控系统的伺服驱动更换,或因为更换电池等原因,使伺服参数出现错误时,必须对伺服系统进行初始化处理与重新调整。数字伺服的初始化步骤如下。(1)初始化的准备在初始化数字伺服前,应首先确认以下基本数据,以便进行初始化工作。1)数控系统的型号。2)伺服电动机的型号、规格、电动机代码。3)电动机内装的脉冲编码器的型号、规格。4)伺服系统是否使用外部位置检测器件,如

FANUC 数字伺服参数设定、主要参数调整及维修.pdf
数字伺服参数设定、主要参数调整及维修中国机电设备与维修改造技术协会&北京蓝拓机电设备有限公司2005年7月中国机电设备与维修改造技术协会&北京蓝拓机电设备有限公司2维修培训班讲义撰写宋松目录1.伺服参数的设置................................................................................................................61-1.数字伺服框图及工作原理.......................

FANUC进给伺服系统故障分析.doc
FANUC进给伺服系统故障分析(5)Friday,December07,20071:00:15AM发布:sunlight3.交流数字主轴驱动单元序号故障征兆原因分析解决方法1过热报警(LED显示AL-01)交流主轴电机的过热开关断开。1.检查CN1插头是否连接不牢。2.是否主轴电机负载太大,电机太热,等温度降低后再开机看是否还有报警。3.拔下控制板CN2插头,用万用表测量插脚2,3之间的阻值,正常应为短路,如果开路,则是电机或反馈线断线,检查电机的热保护开关或反馈线。4.如果CN1的2,3之间正常,则更换