
工业机器人的轨迹规划和控制.doc

15****47


1/10

2/10

3/10
4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
工业机器人的轨迹规划和控制.doc
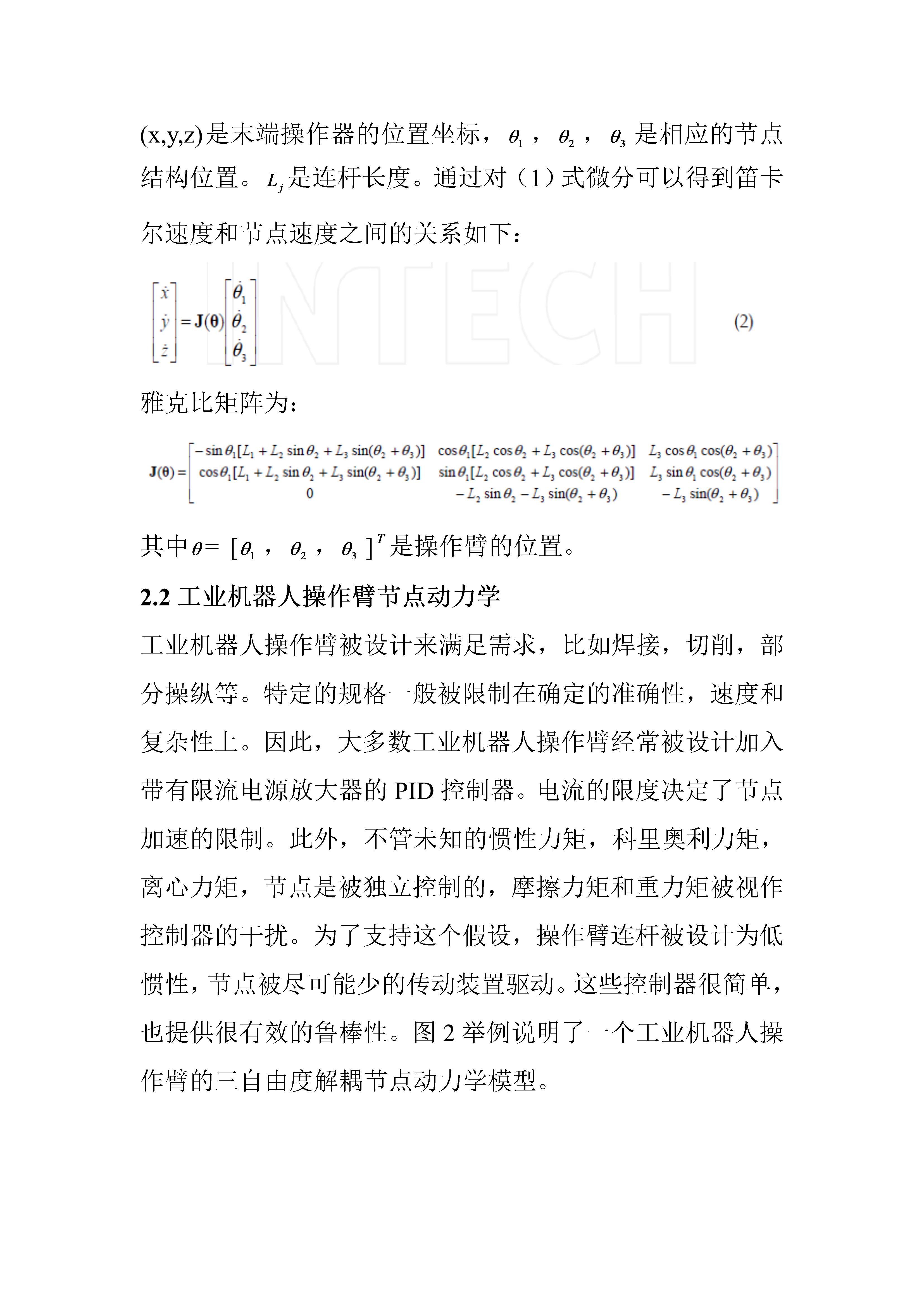
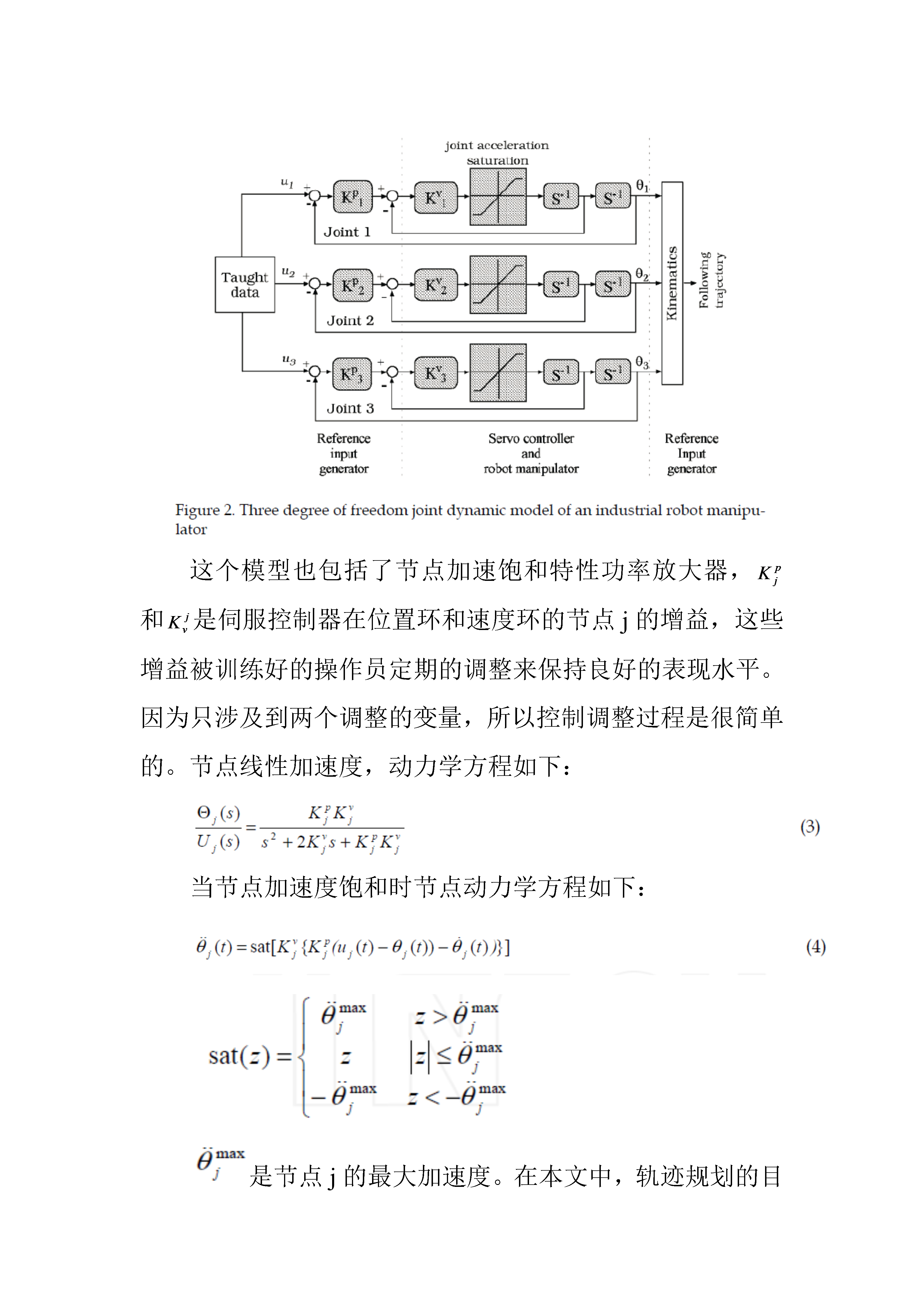
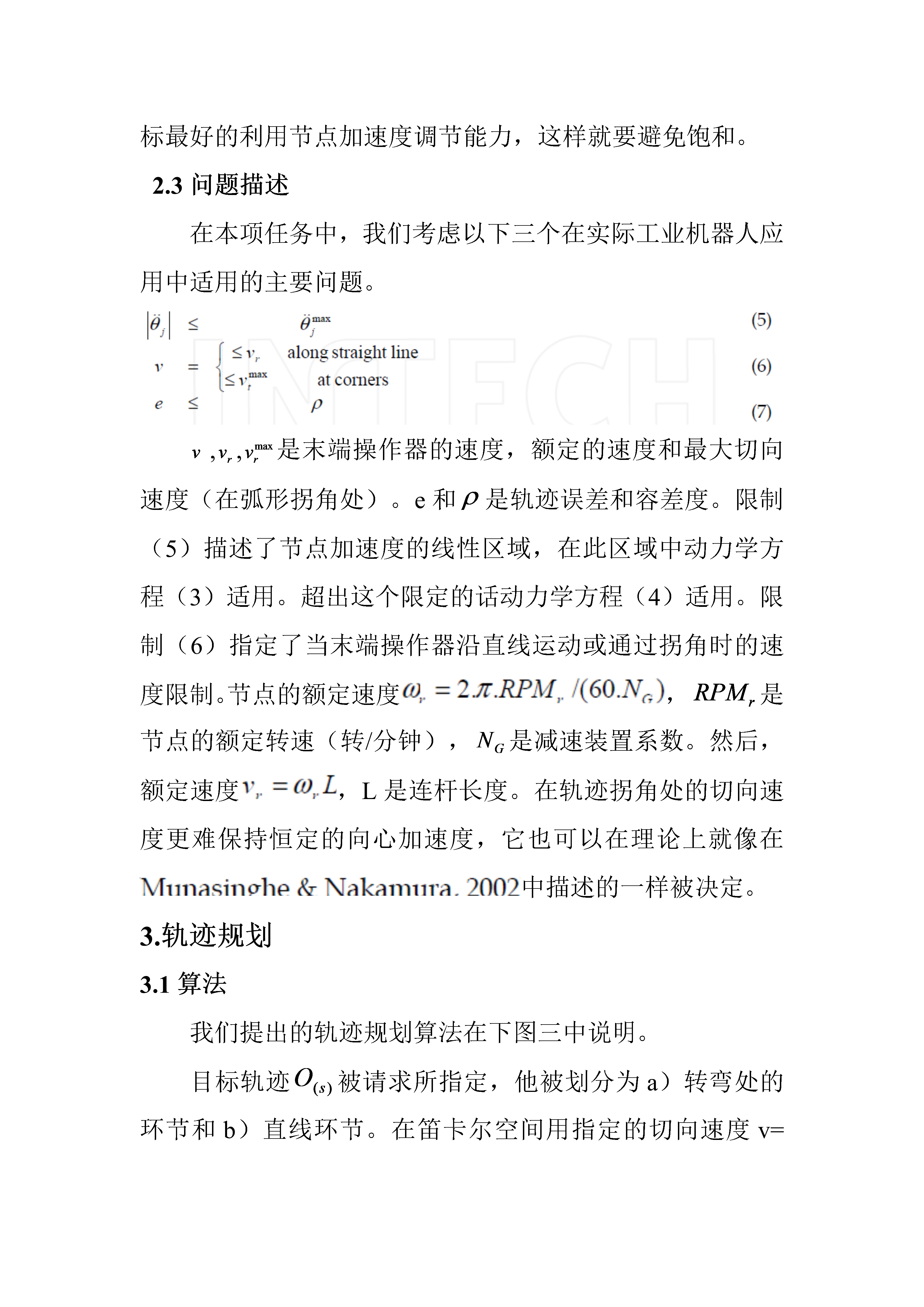
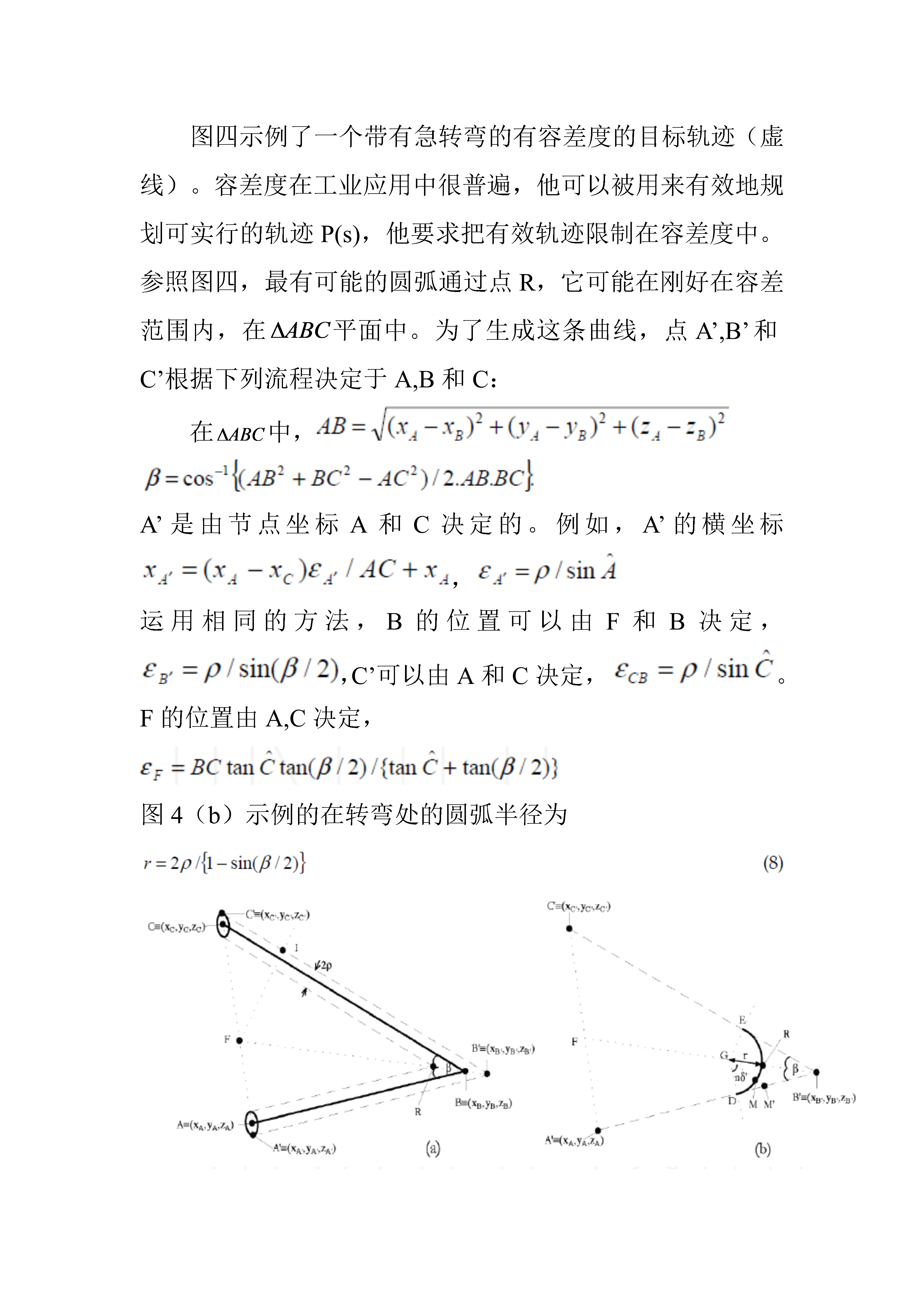
工业机器人的轨迹规划和控制S.R.MunasingheandMasatoshiNakamura1.简介工业机器人操作臂被用在各种应用中来实现快速、精确和高质量的生产。在抓取和放置操作,比如对部分的操作,聚合等,操作臂的末端只执行器必须在工作空间中两个特定的位置之间移动,而它在两者之间的路径却不被关心。在路径追踪应用中,比如焊接,切削,喷涂等等,末端操作器必须在尽可能保持额定的速度下,在三维空间中遵循特定的轨迹运动。在后面的事例中,在对末端操作器的速度、节点加速度、轨迹有误等限订的情况下轨迹规划可能会很复杂

工业机器人的轨迹规划和控制.doc
工业机器人的轨迹规划和控制S.R.MunasingheandMasatoshiNakamura1.简介工业机器人操作臂被用在各种应用中来实现快速、精确和高质量的生产。在抓取和放置操作,比如对部分的操作,聚合等,操作臂的末端只执行器必须在工作空间中两个特定的位置之间移动,而它在两者之间的路径却不被关心。在路径追踪应用中,比如焊接,切削,喷涂等等,末端操作器必须在尽可能保持额定的速度下,在三维空间中遵循特定的轨迹运动。在后面的事例中,在对末端操作器的速度、节点加速度、轨迹有误等限订的情况下轨迹规划可能会很复杂

工业机器人的轨迹规划和控制.docx
工业机器人的轨迹规划和控制S.R.MunasingheandMasatoshiNakamura1.简介工业机器人操作臂被用在各种应用中来实现快速、精确和高质量的生产。在抓取和放置操作,比如对部分的操作,聚合等,操作臂的末端只执行器必须在工作空间中两个特定的位置之间移动,而它在两者之间的路径却不被关心。在路径追踪应用中,比如焊接,切削,喷涂等等,末端操作器必须在尽可能保持额定的速度下,在三维空间中遵循特定的轨迹运动。在后面的事例中,在对末端操作器的速度、节点加速度、轨迹有误等限订的情况下轨迹规划可能会很复杂

工业机器人的轨迹规划.pptx
123456789101112131415161718192021222324

基于ROS的工业机器人轨迹规划和仿真.docx
基于ROS的工业机器人轨迹规划和仿真基于ROS的工业机器人轨迹规划和仿真摘要:近年来,随着工业机器人在制造业中的广泛应用,机器人轨迹规划和仿真成为了一个研究热点。本文基于ROS(RobotOperatingSystem)对工业机器人的轨迹规划和仿真进行了深入探讨。首先介绍了ROS的基本概念和架构,并简要说明了ROS对于机器人轨迹规划与仿真的重要性。然后,分析了工业机器人轨迹规划的常见方法,并详细介绍了ROS中常用的几种轨迹规划算法。在此基础上,结合ROS的仿真环境Gazebo,进行了工业机器人轨迹规划的仿