
步进电机细分驱动控制.doc

15****47

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共39页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

步进电机细分驱动控制.doc
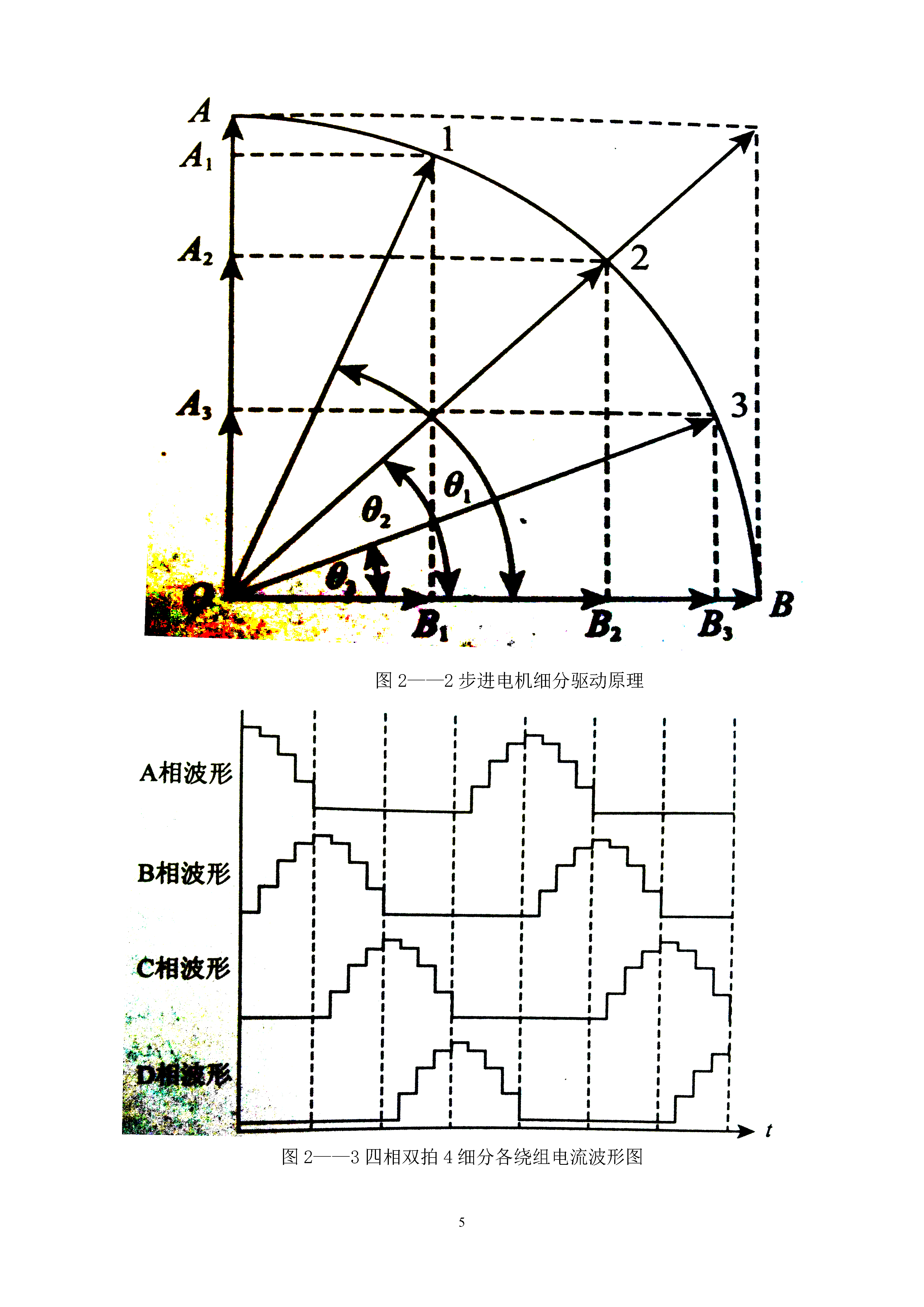
“EDA技术应用”专用周报告(步进电机细分驱动控制)系部:电气信息工程系班级:通信技术11—1指导老师:龚老师姓名:齐棋201112020148姓名:付晓会201112020121摘要本次课题(步进电机细分驱动控制)要求使用PWM方法来控制步进电机的驱动和细分旋转,实现1/4细分(4.5°/步)控制盒不细分控制(18°/步)。用KEY1控制步进电机正/反(由LED1和数码管指示状态);KEY2控制步进电机正常运行/细分运行(由LED2和数码管指示状态)。利用QuartusⅡ完成设计、仿真等工作,最后在Sm

步进电机细分驱动控制.doc
“EDA技术应用”专用周报告(步进电机细分驱动控制)系部:电气信息工程系班级:通信技术11—1指导老师:龚老师姓名:齐棋2姓名:付晓会2摘要本次课题(步进电机细分驱动控制)要求使用PWM方法来控制步进电机的驱动和细分旋转,实现1/4细分(4.5°/步)控制盒不细分控制(18°/步)。用KEY1控制步进电机正/反(由LED1和数码管指示状态);KEY2控制步进电机正常运行/细分运行(由LED2和数码管指示状态)。利用QuartusⅡ完成设计、仿真等工作,最后在SmartEDA实验箱上进行硬件测试达到课题要求

步进电机细分驱动控制.doc
“EDA技术应用”专用周报告(步进电机细分驱动控制)系部:电气信息工程系班级:通信技术11—1指导老师:龚老师姓名:齐棋201112020148姓名:付晓会201112020121摘要本次课题(步进电机细分驱动控制)要求使用PWM方法来控制步进电机的驱动和细分旋转,实现1/4细分(4.5°/步)控制盒不细分控制(18°/步)。用KEY1控制步进电机正/反(由LED1和数码管指示状态);KEY2控制步进电机正常运行/细分运行(由LED2和数码管指示状态)。利用QuartusⅡ完成设计、仿真等工作,最后在Sm

步进电机细分驱动控制.doc
“EDA技术应用”专用周报告(步进电机细分驱动控制)系部:电气信息工程系班级:通信技术11—1指导老师:龚老师姓名:齐棋201112020148姓名:付晓会201112020121摘要本次课题(步进电机细分驱动控制)要求使用PWM方法来控制步进电机的驱动和细分旋转,实现1/4细分(4.5°/步)控制盒不细分控制(18°/步)。用KEY1控制步进电机正/反(由LED1和数码管指示状态);KEY2控制步进电机正常运行/细分运行(由LED2和数码管指示状态)。利用QuartusⅡ完成设计、仿真等工作,最后在Sm

步进电机细分驱动.doc
技术文档-步进电机多级细分驱动方法研究步进电机作为电磁机械装置,其进给的分辨率取决于细分驱动技术。采用软件细分驱动方式,由于编程的灵活性、通用性,使得步进细分驱动的成本低、效率高,要修改方案也易办到。同时,还可解决步进电机在低速时易出现的低频振动和运行中的噪声等。但单一的软件细分驱动在精度与速度兼顾上会有矛盾,细分的步数越多,精度越高,但步进电机的转动速度却降低;要提高转动速度,细分的步数就得减少。为此,设计了多级细分驱动系统,通过不同的细分档位设定,实现不同步数的细分,同时保证了不同的转动速度。1细分驱