
PWM调速+循迹--智能小车程序.docx

论文****可爱


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共57页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

PWM调速+循迹--智能小车程序.docx
PW碉速+循迹-智能小车程序〃T0产生双路PWM信号,L298N为直流电机调速,接L298N时相应的管脚上最好接上10K的上拉电阻。/晶振采用12M,产生的PWM的频率约为1Hz*/#include<reg51h>#include<mathh>#defineucharunsignedchar#defineuintunsignedintsbiten1=P3A4;/*L29的EnableA*/sbiten2=P3A5;/*L298的EnableB*/sbits1=P1A0;/*L298的Input1*/sbi
智能小车PWM调速.pdf
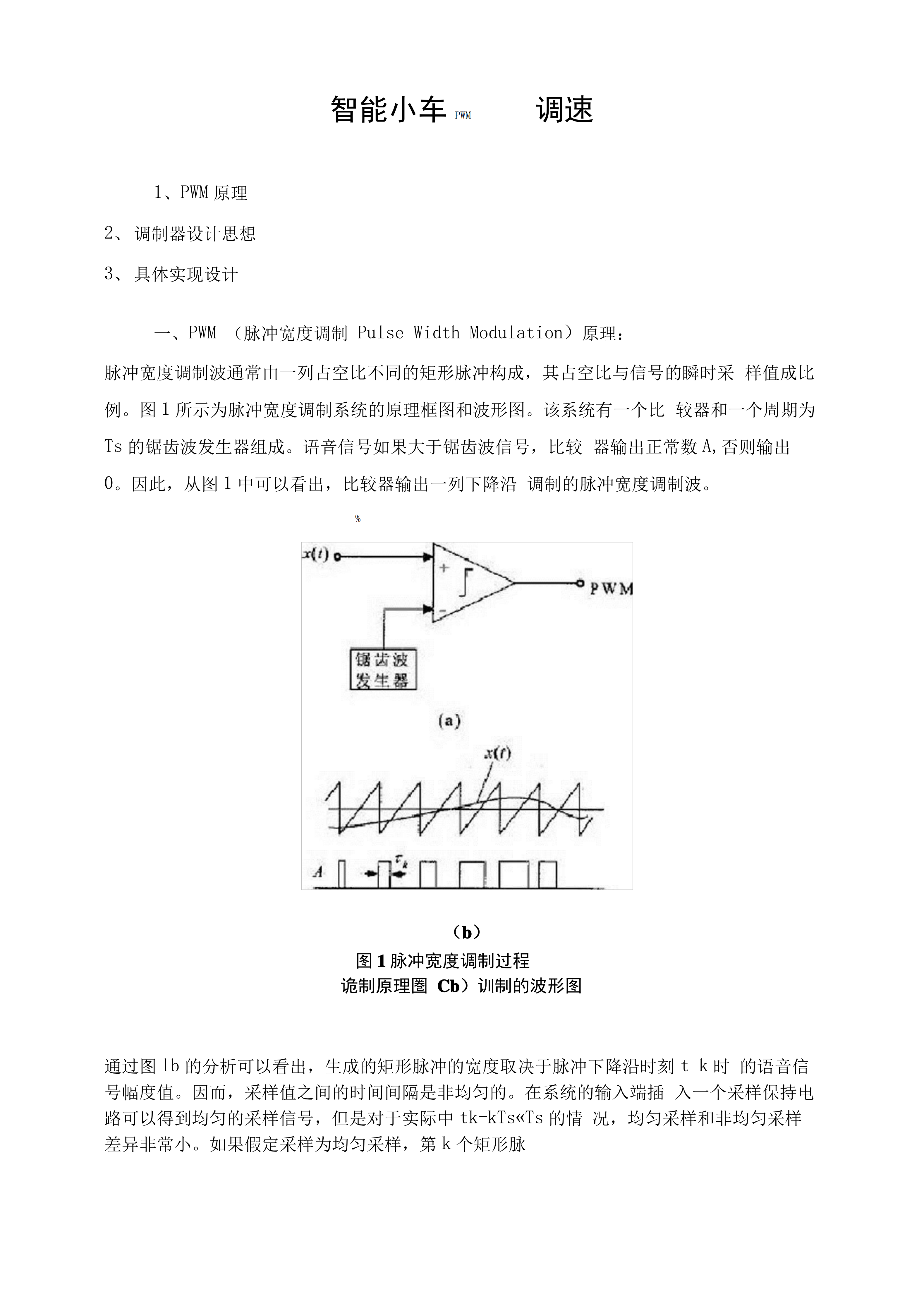
智能小车PWM调速1、PWM原理2、调制器设计思想3、具体实现设计一、PWM(脉冲宽度调制PulseWidthModulation)原理:脉冲宽度调制波通常由一列占空比不同的矩形脉冲构成其占空比与信号的瞬时采样值成比例。图1所示为脉冲宽度调制系统的原理框图和波形图。该系统有一个比

智能循迹小车.docx
目录1.第一章绪论1.1循迹小车旳发展现实状况1.2选题意义1.3本设计旳工作1.3.1设计规定1.3.2设计思绪2.第二章硬件部分简介2.1详细方案论证与设计2.2主控芯片旳简介2.2.1光电反射式传感器(ST178)低功率低失调双比较器LM3933.第三章光电循迹小车旳原理3.1原理3.2传感器电路3.2.1红外反射式光电传感器原理3.2.2黑线检测电路3.3关键控制电路3.3.1模数转换电路(比较器电路)3.3.2数字逻辑电路3.4驱动电路3.5拓展功能“防撞”PCB制板作品展示原件清单4.第四章结

基于51单片机智能小车循迹程序.doc
仅供学习参考#include<reg51.h>#include<stdio.h>#defineuintunsignedint#defineucharunsignedchar/**********************************/ucharled_data[9]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80};ucharcircle=0,cir_comp=0,cir_count=0;//设定圈数,实际圈数ucharturn_count=0;bit

智能循迹小车设计.doc
智能循迹/避障小车研究工作报告智能循迹小车程序结构框图Proteus仿真图软件程序设计智能循迹小车程序结构框图经过几天在网上得查找,对智能循迹/避障小车有了大致得了解,一般有三个模块:1、最基本得小车驱动模块,使用两个二相四线步进电机对小车得两个后轮分别进行驱动,前轮最好用万向轮,能使小车更好地转弯;2、小车循迹模块,在小车底部有三个并排安装得红外对管,对黑色与白色得反射信号不同,经单片机处理后对小车进行相应处理;3、避障模块,我写得程序中对于避障模块就是用中断来处理得(即安装在小车车头得红外对管检测到有