
双闭环控制的直流调速系统.ppt

胜利****实阿

1/10
2/10
3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共79页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

【双闭环控制的直流调速系统】直流双闭环调速.docx
【双闭环控制的直流调速系统】直流双闭环调速控制系统综合设计指导老师:XXX老师年级专业12自动化X班姓名学号XXX20123120xxxx2016年1月8日题目及要求设计题目:直流调速系统计算机仿真设计背景:直流调速系统是传统的调速系统,自19世纪80年代起至19世纪末以前,工业上传动所用电动机一直以直流电动机为唯一方式。它具有稳速精度高、调速比大、响应时间短等特点,宜于在广泛范围内平滑调速,故广泛应用于轧钢、机床、轻工、计算机、飞机传动机构等领域。近年来,交流调速系统发展很快,被科学技术水平较高的西方国

双闭环控制的直流调速系统.ppt
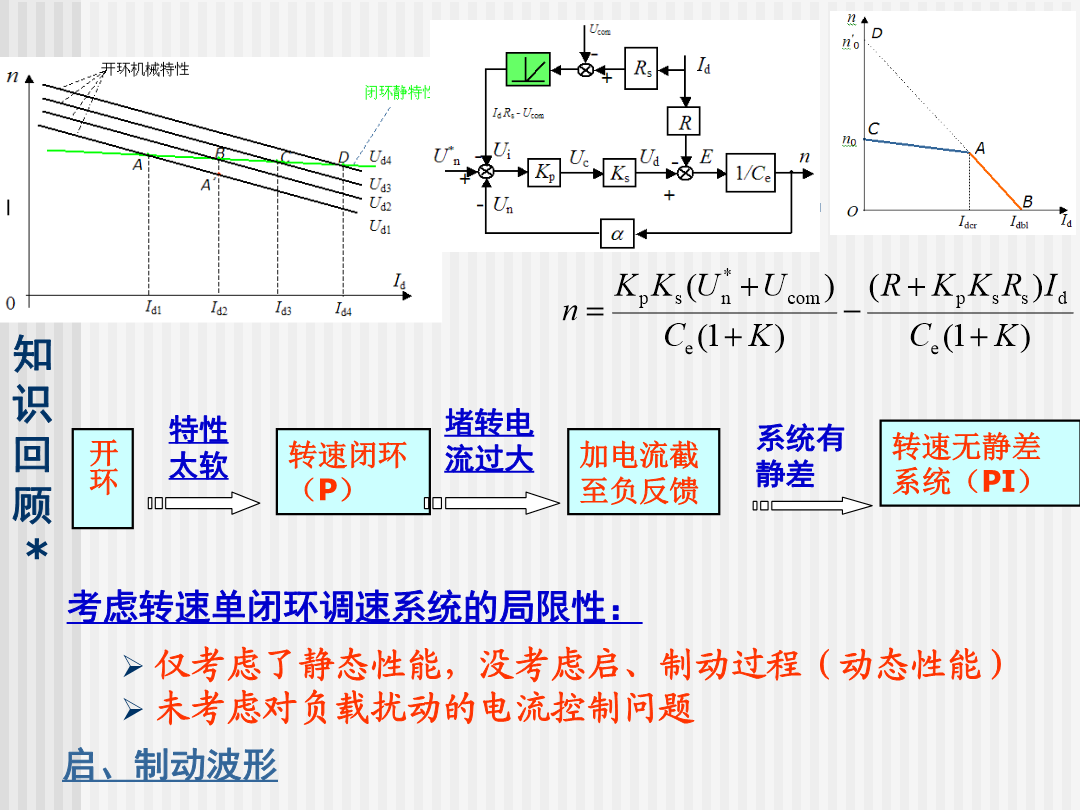
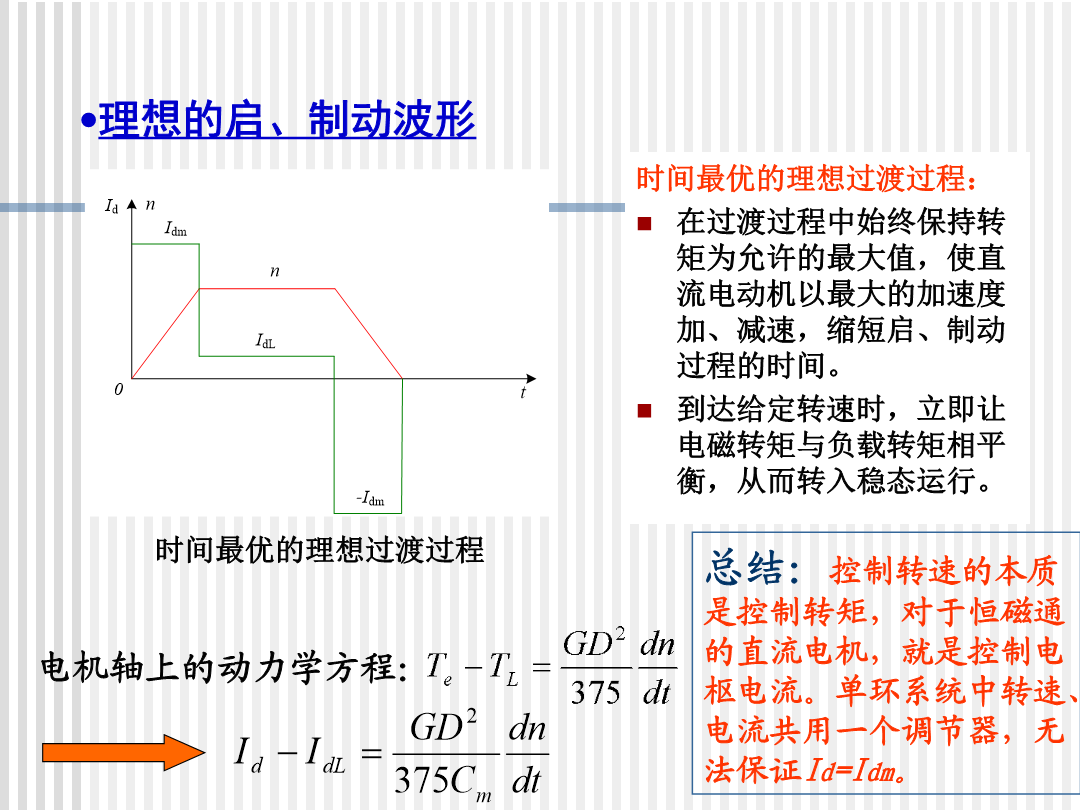
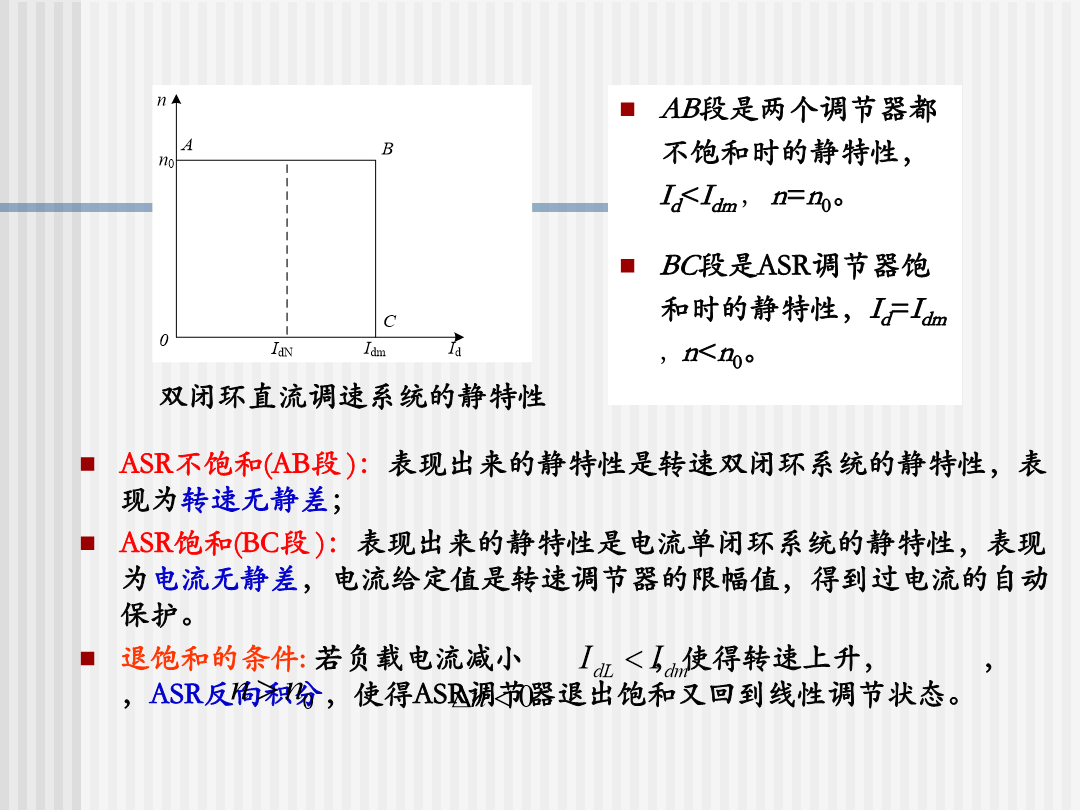
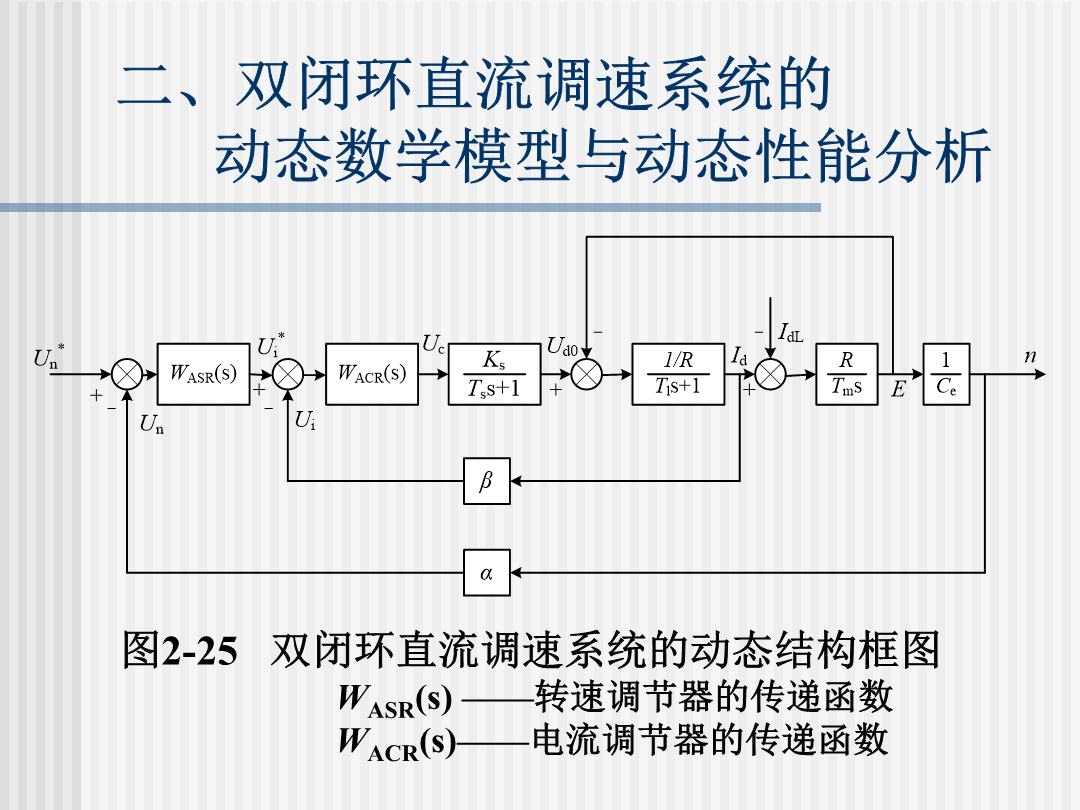
2.2转速、电流双闭环直流调速系统考虑转速单闭环调速系统的局限性:仅考虑了静态性能,没考虑启、制动过程(动态性能)未考虑对负载扰动的电流控制问题理想的启、制动波形1、原理图图2-23双闭环直流调速系统的稳态结构框图α——转速反馈系数β——电流反馈系数当调节器ASR不饱和时,ASR、ACR均不饱和,其输入偏差电压均为零。转速不变,。满足:AB段是两个调节器都不饱和时的静特性,Id<Idm,n=n0。BC段是ASR调节器饱和时的静特性,Id=Idm,n<n0。反馈系数计算二、双闭环直流调速系统的动态数学模型与

双闭环控制的直流调速系统ppt课件.ppt
2.2转速、电流双闭环直流调速系统考虑转速单闭环调速系统的局限性:仅考虑了静态性能,没考虑启、制动过程(动态性能)未考虑对负载扰动的电流控制问题理想的启、制动波形1、原理图图2-23双闭环直流调速系统的稳态结构框图α——转速反馈系数β——电流反馈系数当调节器ASR不饱和时,ASR、ACR均不饱和,其输入偏差电压均为零。转速不变,。满足:AB段是两个调节器都不饱和时的静特性,Id<Idm,n=n0。BC段是ASR调节器饱和时的静特性,Id=Idm,n<n0。反馈系数计算二、双闭环直流调速系统的动态数学模型与

转速电流双闭环控制的直流调速系统仿真.doc
转速电流双闭环控制的直流调速系统仿真(a)(b)图6-15按动态结构图仿真的电流和转速响应曲线电流响应(b)转速响应图6-16转速电流双闭环控制直流调速系统仿真模型(a)(b)(c)图6-17晶闸管电动机模型双闭环系统仿真结果(a)整流器输出电压(b)转速响应(c)电流响应

闭环控制的直流调速系统复习.pptx
闭环控制的直流调速系统复习2024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/22024/10/