
关于天宝R8-RTK及VRS测量简明教程.docx

Wi****m7


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

关于天宝R8RTK及VRS测量简明教程.pdf
关于天宝R8RTK及VRS测量简明教程RTK定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。在RTK作业模式下,基准站通过数据链将其观测值与测站坐标信息一起传送给流淌站。流淌站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内构成差分观测值进行实时处理,同时给出厘米级定位结果。只要能保持四颗以上卫星相位观测值的跟踪与必要的几何图形,则流淌站可随时给出厘米级定位结果。二、VRS(VirtuaReferenceStat

关于天宝R8-RTK及VRS测量简明教程.docx
一、RTK(Real-timekinematic)实时动态差分法。RTK定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果。只要能保持四颗以上卫星相位观测值的跟踪和必要的几何图形,则流动站可随时给出厘米级定位结果。二、VRS(Virtu
关于天宝R8-RTK及VRS测量简明教程.docx
一、RTK(Real-timekinematic)实时动态差分法。RTK定位技术就是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理,同时给出厘米级定位结果。只要能保持四颗以上卫星相位观测值的跟踪和必要的几何图形,则流动站可随时给出厘米级定位结果。二、VRS(Virtu
关于天宝R8-RTK及VRS测量简明教程.pdf
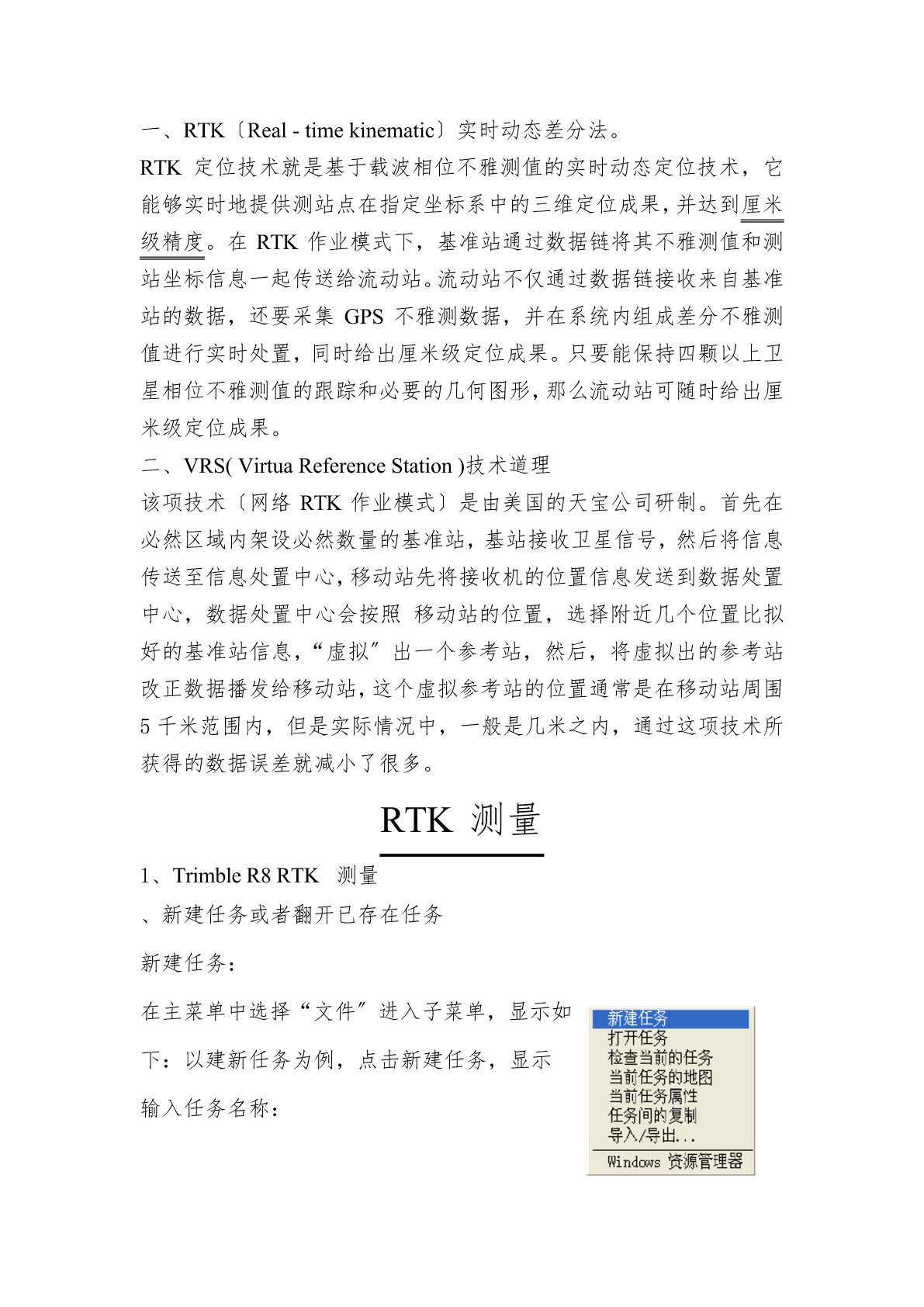
一、RTK〔Real-timekinematic〕实时动态差分法。RTK定位技术就是基于载波相位不雅测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位成果,并达到厘米级精度。在RTK作业模式下,基准站通过数据链将其不雅测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS不雅测数据,并在系统内组成差分不雅测值进行实时处置,同时给出厘米级定位成果。只要能保持四颗以上卫星相位不雅测值的跟踪和必要的几何图形,那么流动站可随时给出厘米级定位成果。二、VRS

关于天宝R8-RTK及VRS测量简明教程.docx
一、RTK(Real-timekinematic)实时动态差分法。RTK定位技术就是基于载波相位观测值的实时动态定位技术它能够实时地提供测站点在指定坐标系中的三维定位结果并达到厘米级精度。在RTK作业模式下基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据还要采集GPS观测数据并在系统内组成差分观测值进行实时处理同时给出厘米级定位结果。只要能保持四颗以上卫星相位观测值的跟踪和必要的几何图形则流动站可随时给出厘米级定位结果。二、VRS(VirtuaR