
PID控制经典PPT课件.ppt

胜利****实阿


1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共132页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

PID控制经典PPT课件.ppt
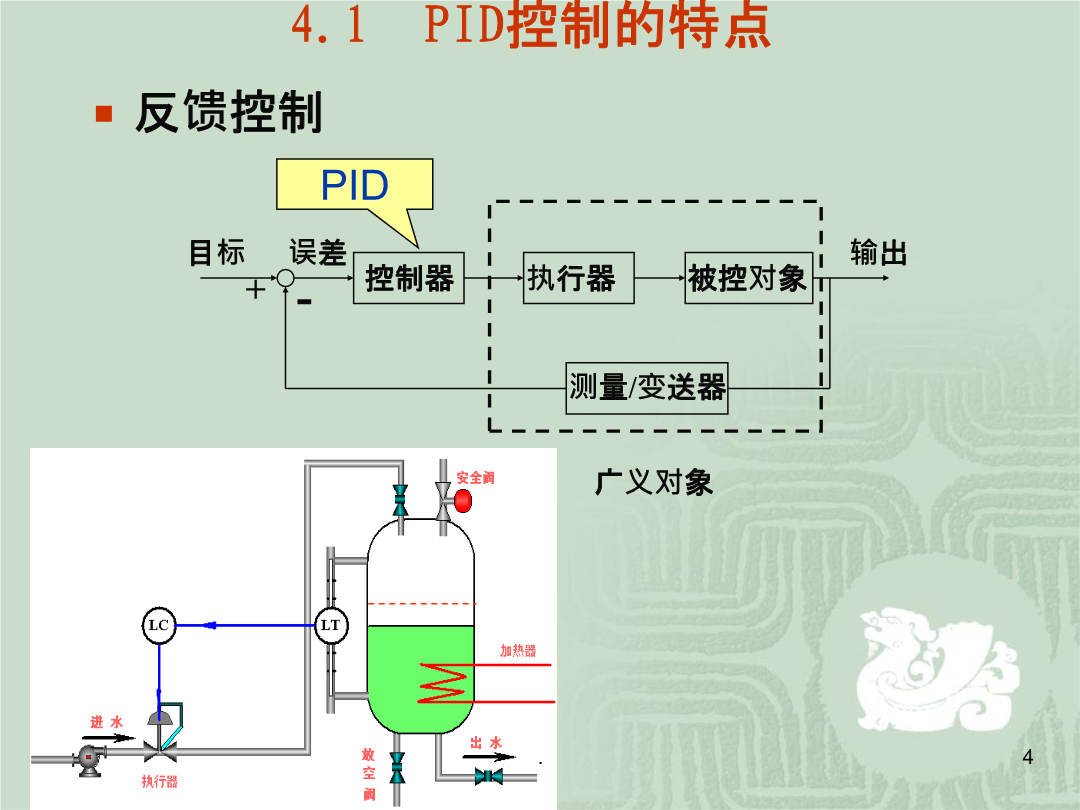
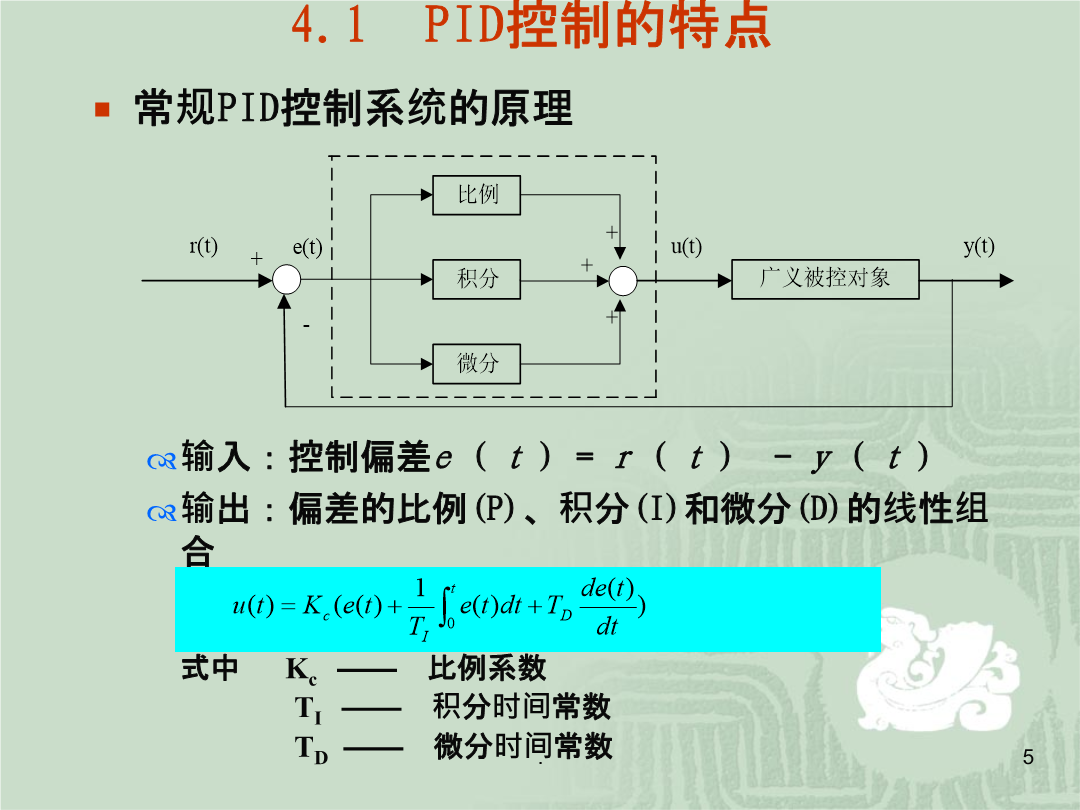
第4章PID控制原理4.lPID控制的特点反馈控制常规PID控制系统的原理输入:控制偏差e(t)=r(t)-y(t)输出:偏差的比例(P)、积分(I)和微分(D)的线性组合PID控制具有以下优点:在过程控制中,绝大部分都采用PID控制。例外的情况有两种。4.2比例调节(P调节)4.2.1比例控制的调节规律和比例带在实际应用中,由于执行器的运动(如阀门开度)有限,控制器的输出u(t)也就被限制在一定的范围之内,换句话说,在Kc较大时,偏差e(t)仅在一定的范围内与控制器的输出保持线性关系。图4-1说明了偏差
pid控制PPT课件.ppt
1.1PID控制原理模拟PID控制系统原理框图.1.1PID控制原理.1.1PID控制原理.1.1PID控制原理.1.1PID控制原理1.2数字PID控制1.2.1位置式PID控制算法1.2.2增量式PID控制算法如果控制系统采用恒定的采样周期T,只要使用前后三次采样得到的偏差值,就可以求出控制量的增量增量式PID控制算法与位置式PID算法相比,计算量小的多,因此在实际中得到广泛的应用。位置式PID控制算法也可以通过增量式控制算法推出递推计算公式:上式就是目前在计算机控制中广泛应用的数字递推PID控制算法

PID控制ppt课件.ppt
第4章PID控制PID控制:对偏差信号e(t)进行比例、积分和微分运算变换后形成的一种控制规律。反应器的温度控制人工操作过程分析人工操作(1):开关控制人工操作(2):比例控制人工操作(2):比例控制人工操作(3):增加积分作用2、PID控制的应用场合?3、比例(P)控制(现在)3、比例(P)控制(现在)其控制器的输出与输入误差信号成比例关系。其传递函数为:3、比例(P)控制(现在)偏差一旦产生,控制器立即就发生作用即调节控制输出(在时间上没有延迟),使被控量朝着减小偏差的方向变化,偏差减小的速度取决于比
PID控制ppt课件.ppt
PID控制原理(一)内容简介PID控制的特点PID常规PID控制系统的原理输入:控制偏差e(t)=r(t)-y(t)输出:偏差的比例(P)、积分(I)和微分(D)的线性组合PID控制具有以下优点:在过程控制中,绝大部分都采用PID控制。例外的情况有两种。比例调节(P调节)比例控制的调节规律和比例带在实际应用中,由于执行器的运动(如阀门开度)有限,控制器的输出u(t)也就被限制在一定的范围之内,换句话说,在Kc较大时,偏差e(t)仅在一定的范围内与控制器的输出保持线性关系。图中说明了偏差与输出之间保持线性关

模糊PID控制ppt课件.ppt
AnImprovedFuzzyPIDControlAlgorithmAppliedinLiquidMixingSystemContent(目录)Abstract(摘要)Background(背景)StructureofLiquidMixingSystem(液体混合系统结构)BasicIdeasFuzzyControlSystemParameterssettingFuzzyControlTableSimulationSimulationResults.Solution(方案)Result(成果)Summar