
模糊PID控制ppt课件.ppt

天马****23


1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

模糊PID控制ppt课件.ppt
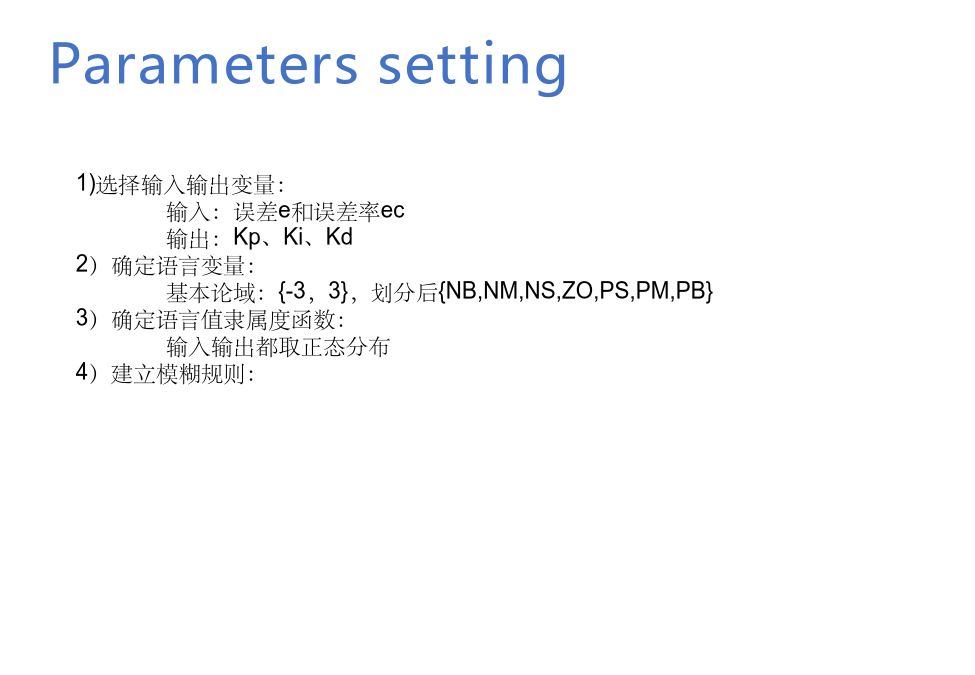
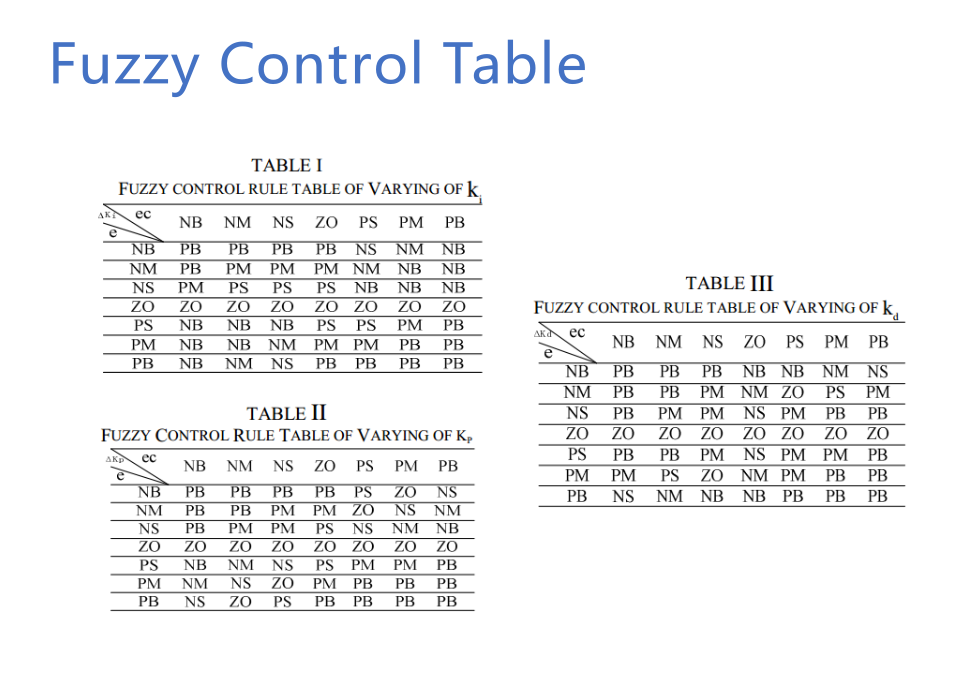
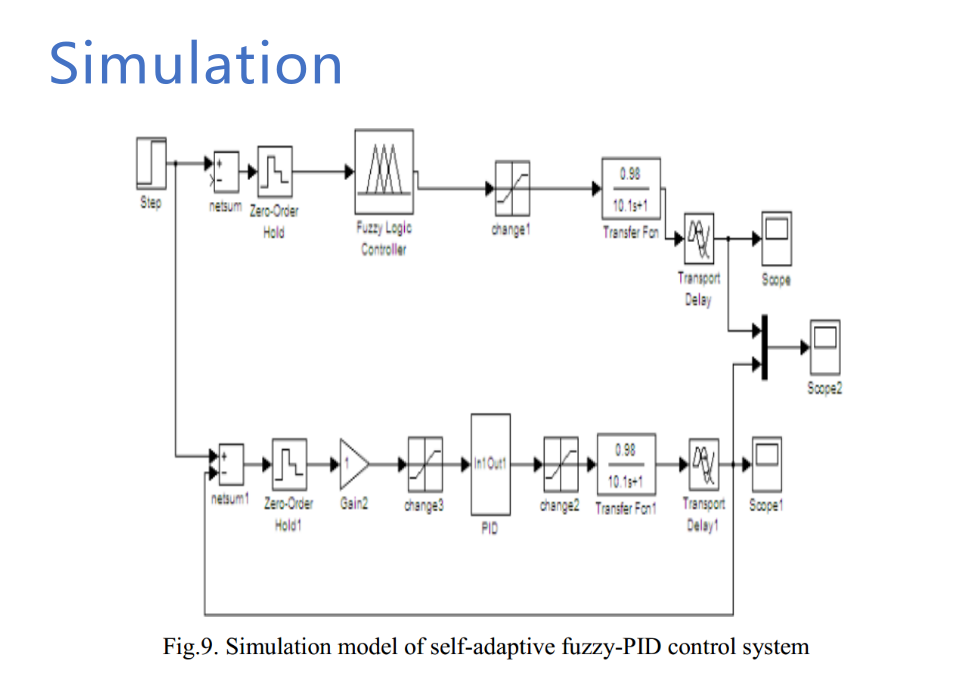
AnImprovedFuzzyPIDControlAlgorithmAppliedinLiquidMixingSystemContent(目录)Abstract(摘要)Background(背景)StructureofLiquidMixingSystem(液体混合系统结构)BasicIdeasFuzzyControlSystemParameterssettingFuzzyControlTableSimulationSimulationResults.Solution(方案)Result(成果)Summar

PID及模糊控制算法ppt课件.ppt
第3章智能汽车设计基础—软件第3章智能汽车设计基础—软件3.1编程语言简介3.1编程语言简介3.1编程语言简介3.2控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3.2.1PID控制算法3

模糊PID控制-PPT.ppt
AnImprovedFuzzyPIDControlAlgorithmAppliedinLiquidMixingSystemContent(目录)Abstract(摘要)Background(背景)StructureofLiquidMixingSystem(液体混合系统结构)BasicIdeasFuzzyControlSystemParameterssettingFuzzyControlTableSimulationSimulationResultsSolution(方案)Result(成果)Summary

PID与模糊PID控制.docx
经典PID与模糊PID控制一、PID控制规律控制输出由三部分组成:比例环节——根据偏差量成比例的调节系统控制量,以此产生控制作用,减少偏差。比例系数的作用是加快系统的响应速度,比例系数越大,系统响应速度越快,系统的调节精度越高,但容易产生超调,甚至会导致系统的不稳定;比例系数过小,会降低系统调节精度,系统响应速度变慢,调节时间变长,系统动态、静态特性变坏。比例控制是最简单的控制结构,然而,它也能使系统满足某一方面的特性要求,如GM、PM、稳态误差等。积分环节——用于消除静差,提高系统的无差度。积分作用的强

经典PID与模糊PID控制.pdf
经典PID与模糊PID控制一、PID控制规律控制输出由三部分组成:比例环节——根据偏差量成比例的调节系统控制量,以此产生控制作用,减少偏差。比例系数的作用是加快系统的响应速度,比例系数越大,系统响应速度越快,系统的调节精度越高,但容易产生超调,甚至会导致系统的不稳定;比例系数过小,会降低系统调节精度,系统响应速度变慢,调节时间变长,系统动态、静态特性变坏。比例控制是最简单的控制结构,然而,它也能使系统满足某一方面的特性要求,如GM、PM、稳态误差等。积分环节——用于消除静差,提高系统的无差度。积分作用的强