
雷达速度检测原理与实际应用.pptx

胜利****实阿

1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
雷达速度检测原理与实际应用.ppt
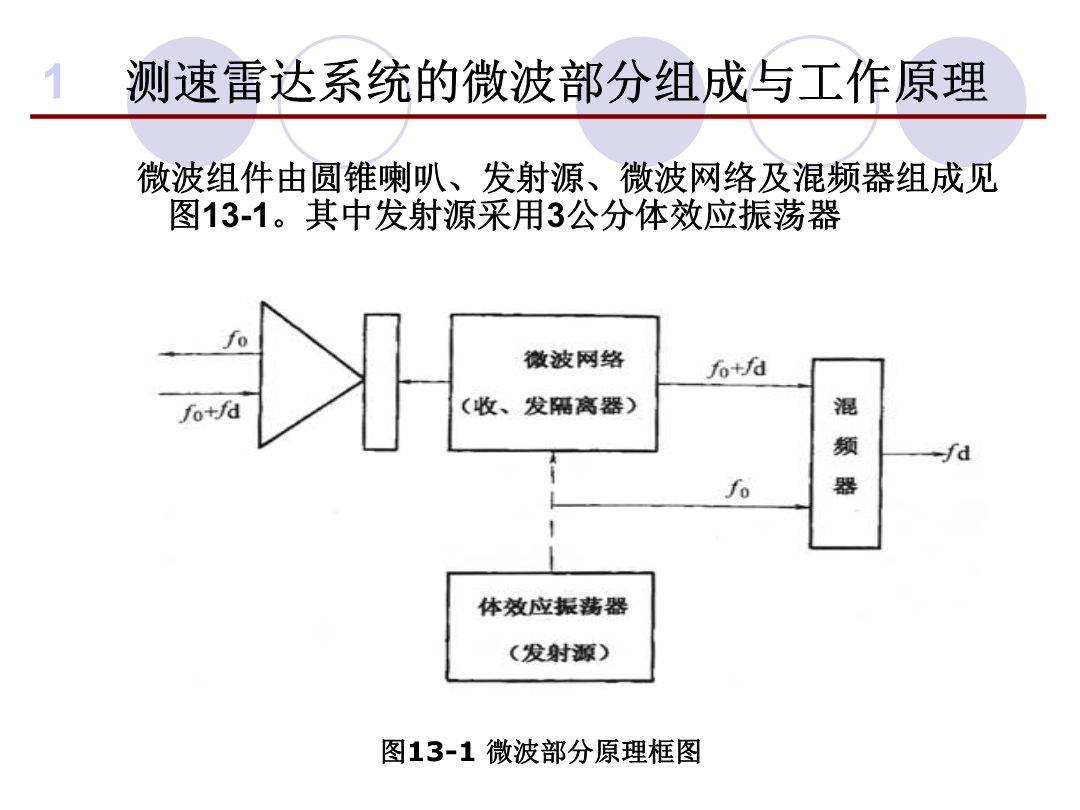
第13章汽车交通安全控制系统中的现代检测技术测速雷达系统的微波部分组成与工作原理微波组件由圆锥喇叭、发射源、微波网络及混频器组成见图13-1。其中发射源采用3公分体效应振荡器交通雷达测速仪工作原理多普勒效应波的频率和波源与观察者之间的相对运动有关当物体相对于微波信号源运动时,有下面的关系式成立(13-1)反射信号的频率微波源产生的发射频率运动物体的径向速度分量电磁波在空间的传播速度。从式(13-1)式中可以看到,接收到的反射信号频率是由两项组成的,第一项是由微波源产生的发射频率;第二项就是由物体运动引起反

雷达速度检测原理与实际应用.pptx
测速雷达系统的微波部分组成与工作原理微波组件由圆锥喇叭、发射源、微波网络及混频器组成见图13-1。其中发射源采用3公分体效应振荡器交通雷达测速仪工作原理多普勒效应波的频率和波源与观察者之间的相对运动有关当物体相对于微波信号源运动时,有下面的关系式成立(13-1)反射信号的频率微波源产生的发射频率运动物体的径向速度分量电磁波在空间的传播速度。从式(13-1)式中可以看到,接收到的反射信号频率是由两项组成的,第一项是由微波源产生的发射频率;第二项就是由物体运动引起反射信号的多谱勒频移。这个频移量就叫做多谱勒频

雷达测速原理及其实际应用的研究.doc
工程设计作业关于雷达测速原理及其实际应用的研究班级:020831学号:02083050姓名:陈彦武关于雷达测速原理及其实际应用的研究一雷达测速原理:雷达英文为RADAR,是RadioDetectionAndRanging的缩写.为目前侦测移动物体最普遍的方法.雷达测速的基本原理是应用‘都卜勒Doppler效应’,利用持续不断发射出电波的装置,对着物体发射出电波,当无线电波在行进的过程中,碰到物体时被反射,而且其反弹回来的电波波长会随着所碰到的物体的移动状态而改变.经由计算之后,便可得知该物体与雷达之间相对

地质雷达在隧道无损检测中的实际应用.pptx
汇报人:目录PARTONEPARTTWO电磁波传播原理雷达探测原理雷达数据处理雷达图像解释PARTTHREE隧道衬砌检测隧道内部结构检测隧道施工监测隧道安全评估PARTFOUR非接触式检测高精度和高分辨率快速检测无损检测PARTFIVE电磁波传播影响因素检测精度和深度限制复杂地形和环境影响成本和设备限制PARTSIX新技术和新方法研究提高检测精度和深度扩大应用范围和领域降低成本和提高普及率THANKYOU

地质雷达在隧道无损检测中的实际应用.docx
地质雷达在隧道无损检测中的实际应用隧道工程在人类生产和生活中扮演着至关重要的角色,隧道建设已成为现代城市建设和公路铁路建设的重要环节。为确保隧道运行安全,隧道无损检测成为了隧道建设的一项重要技术。地质雷达作为一种高效、快速、经济的无损检测技术,已在隧道建设中得到广泛应用。本文将介绍地质雷达在隧道无损检测中的应用及其实际效果。一、地质雷达检测原理地质雷达是一款高精度的非接触式地质勘测仪器,可以快速、准确及可靠地生成大量的地质信息。其主要原理是通过向地下向下发射电磁波,再通过接收经过反射和散射后的信号来图像化