
雷达速度检测原理与实际应用.ppt

kp****93

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
雷达速度检测原理与实际应用.ppt
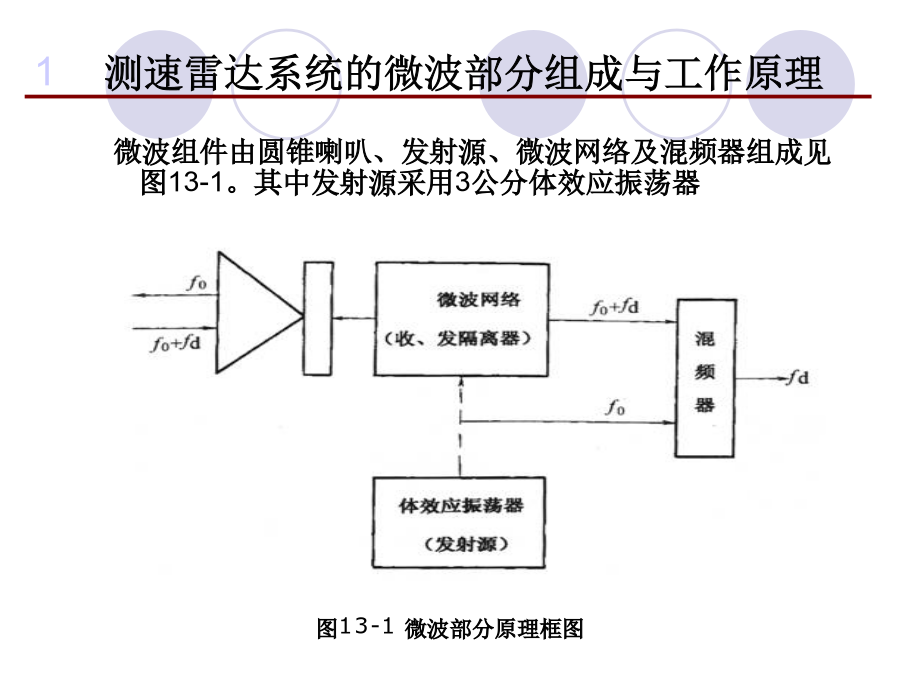
第13章汽车交通安全控制系统中的现代检测技术测速雷达系统的微波部分组成与工作原理微波组件由圆锥喇叭、发射源、微波网络及混频器组成见图13-1。其中发射源采用3公分体效应振荡器交通雷达测速仪工作原理多普勒效应波的频率和波源与观察者之间的相对运动有关当物体相对于微波信号源运动时,有下面的关系式成立(13-1)反射信号的频率微波源产生的发射频率运动物体的径向速度分量电磁波在空间的传播速度。从式(13-1)式中可以看到,接收到的反射信号频率是由两项组成的,第一项是由微波源产生的发射频率;第二项就是由物体运动引起反

雷达速度检测原理与实际应用.pptx
测速雷达系统的微波部分组成与工作原理微波组件由圆锥喇叭、发射源、微波网络及混频器组成见图13-1。其中发射源采用3公分体效应振荡器交通雷达测速仪工作原理多普勒效应波的频率和波源与观察者之间的相对运动有关当物体相对于微波信号源运动时,有下面的关系式成立(13-1)反射信号的频率微波源产生的发射频率运动物体的径向速度分量电磁波在空间的传播速度。从式(13-1)式中可以看到,接收到的反射信号频率是由两项组成的,第一项是由微波源产生的发射频率;第二项就是由物体运动引起反射信号的多谱勒频移。这个频移量就叫做多谱勒频
火控雷达应用的原理.pdf
火控雷达应用的原理什么是火控雷达火控雷达是一种用于武器系统的雷达设备,主要用于探测和跟踪目标,从而实现精确打击。火控雷达通常被用于导弹系统、大口径炮、火箭炮等武器系统中,具有重要的实战价值。火控雷达的原理火控雷达的工作原理可以简单概括为发射、接收和处理三个过程。发射1.火控雷达通过发射器产生电磁波(通常是微波或毫米波),并将其发射到空间中。接收1.电磁波遇到目标后,部分波被目标反射回来。2.利用接收天线,火控雷达将反射回来的电磁波接收下来。处理1.接收到的电磁波被转换成电信号后,进入雷达信号处理系统。2.
火控雷达应用的原理.pdf
火控雷达应用的原理什么是火控雷达火控雷达是一种用于武器系统的雷达设备,主要用于探测和跟踪目标,从而实现精确打击。火控雷达通常被用于导弹系统、大口径炮、火箭炮等武器系统中,具有重要的实战价值。火控雷达的原理火控雷达的工作原理可以简单概括为发射、接收和处理三个过程。发射1.火控雷达通过发射器产生电磁波(通常是微波或毫米波),并将其发射到空间中。接收1.电磁波遇到目标后,部分波被目标反射回来。2.利用接收天线,火控雷达将反射回来的电磁波接收下来。处理1.接收到的电磁波被转换成电信号后,进入雷达信号处理系统。2.

雷达测速原理简介及系统应用.doc
测速雷达原理雷达原理简介首先,大家必须先了解雷达的基本原理,因为雷达仍是当前用来检测移动物体最普遍的方法。雷达英文为RADAR,是RadioDetectionAndRanging的缩写。所有利用雷达波来检测移动物体速度的原理,其理论基础皆源自于「多普勒效应」,其应该也是一般常见的多普勒雷达(DopplerRadar),此原理是在19世纪一位澳地利物理学家所发现的物理现象,后来世人为了纪念他的贡献,就以他的名字来为该原理命名。多普勒的理论基础为时间。波是由频率及振幅所构成,而